芜湖市现代测绘基准体系的建立
2013-08-06 15:26:26马祥李华平
城市勘测 2013年4期
马祥,李华平
(芜湖市勘察测绘设计研究院有限责任公司,安徽芜湖 241000)
1 概述
测绘基准体系是国民经济、社会发展和国防建设的重要基础,主要包括大地基准、高程基准和重力基准。测绘基准是进行各种测量工作的起算数据和起算面,是确定地理空间信息的几何形态和时空分布的基础,是表示地理要素在真实世界的空间位置的基准,对于保证地理空间信息在时间域和空间域上的整体性具有重要作用。
芜湖市自1958年至1967年,曾先后委托建工部第三测量大队、武汉测绘学院等单位布设过两次测量控制网(Ⅱ、Ⅲ等三角网和Ⅱ、Ⅲ等水准网)。2003年芜湖市勘察测绘设计研究院有限责任公司利用GPS技术重新建立了市三、四等GPS测量控制网,2004年利用电子水准仪复测了Ⅱ、Ⅲ等水准网,并于2007年进行了控制网和水准网的扩网工作。但是,随着芜湖城市建设的快速扩张,原有三角点、GPS点、水准点破坏严重,成果精度不高,覆盖范围小,同时国务院批准自2008年7月1日启用我国的地心坐标系——2000中国大地坐标系(即CGCS2000),并计划用8年~10年的时间,完成现行国家大地坐标系向2000国家大地坐标系的过渡和转换,因此,急需进行新的测绘基准体系的建设。
2 芜湖市现代测绘基准体系的建立
基于大地测量、卫星导航定位技术、现代地球重力场理论与方法,利用重力数据、GPS水准数据、数字高程模型及EGM 2008全球重力场模型,采用重力法及移去~恢复技术,确定了芜湖市高精度、高分辨率的似大地水准面模型,首次建立起覆盖芜湖市规划区1400 km2集平面、高程及似大地水准面模型为一体的统一、高精度、实用的现代测绘基准体系。体系建设主要由连续运行GPS参考站综合服务系统(WHCORS)、高精度GPS网、精密水准网、似大地水准面精化等4项内容组成。
2.1 连续运行GPS参考站综合服务系统(WHCORS)
芜湖市连续运行GPS参考站综合服务系统2006年7月开始建设,2007年12月完成,2008年7月完成测试并运行,10月通过省国土厅组织的专家组验收,至今系统运行良好,系统主要应用于实时RTK定位及事后精密相对定位。
系统由4个永久连续运行的基准站组成,参考站间最长间距为 46 km,最短间距为 22.5 km,平均间距为 33.2 km。每个站点建设之前运用GAMIT(Ver 10.06)软件、Trimble VRS模拟数据软件、Trimble TGO软件和TEQC等软件对基准站点环境测试合格,控制中心设在芜湖市勘察测绘设计研究院有限责任公司专用机房,芜湖县、南陵县、繁昌县三县各设一个基准站(2011年无为县划归芜湖市后,拟在无为县加设一个)。系统采用当时最新的专供GPS网络应用的基准站接收机Trimble NetRS,该型机有接收未来L2C信号的功能;基准站到控制中心使用10 M光纤实现VPN组网,与ADSL,ISDN和无线局域网相比,其传输延迟较小,具有更高的稳定性和可靠性;数据处理软件采用当时最先进专用软件Trimble GPSNet。参考站点分布如图1所示。
CORS站点南北方向的精度平均值(注:指中误差的平均值,下同)为 ±0.4 mm,东西方向的精度平均值为 ±0.5 mm,高程方向的精度平均值为 ±1.4 mm。CORS站相邻点基线南北方向分量测量的精度平均值为±0.4 mm,东西方向分量测量的精度平均值为±0.5 mm;垂直分量测量的精度平均值为 ±1.8 mm。
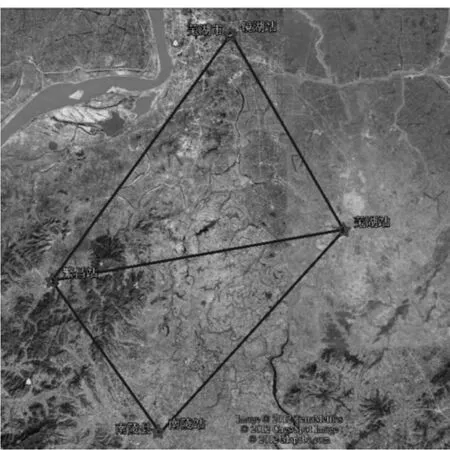
图1 参考站点分布图
2.2 高精度GPS网
高精度GPS网由4个国家GPS连续运行站、4个CORS基准站构成的框架网和67个准B级GPS点构成的基本控制网组成。CORS站使用TRIMBLE 5700接收机、TRM41249.00天线进行观测,时段长度约为23.5 h,共观测11天。基本网使用LEICA双频接收机观测,每点基本观测1个时段,个别点观测2个~4个时段。每时段观测长度约为 23.5 h,观测模式为基于跟踪站模式。
数据处理采用精密星历,软件采用美国麻省理工学院研制的高精度数据处理软件GAMIT/GLOBK 10.40版。收集芜湖市周围泰安(TAIN)、上海(SHAO)、武汉(WUHN)、厦门(XIAM)4个国家GPS连续运行站的数据,在2000国家大地坐标系下,进行三维约束平差,求出芜湖市CORS站点坐标,然后约束四个WHCORS站及经分析较可靠的3个重合安徽省GPS C级点做三维约束平差,求出芜湖市其他GPS网点坐标。GPS网点点位精度统计如表1所示。

GPS网点空间坐标精度(中误差)统计表 表1
由表1可知,GPS网点空间直角坐标X方向的精度平均值为±2.5 mm,Y方向的精度平均值为±4.1 mm,Z方向的精度平均值为±2.9 mm。南北方向的精度平均值为±1.2 mm,东西方向的精度平均值为±1.3 mm,高程方向的精度平均值为±5.4 mm。
GPS网基线解算的精度统计如表2所示。

GPS网基线精度(中误差)统计表 表2
由表2可知,GPS网相邻点基线南北方向分量测量的精度平均值为±1.7 mm,东西方向分量测量的精度平均值为±1.8 mm;垂直分量测量的精度平均值为±7.7 mm;GPS网基线相对中误差最大值为6.32×10-7,平均值为 1.04×10-7。
坐标转换主要是利用2000系分别与80系、54系、芜湖独立坐标系的重合点,采用高精度的Bursa七参数坐标转换模型,通过转换得到80系、54系、芜湖独立坐标系坐标成果。转换总点数为71点。Bursa七参数坐标转换模型:
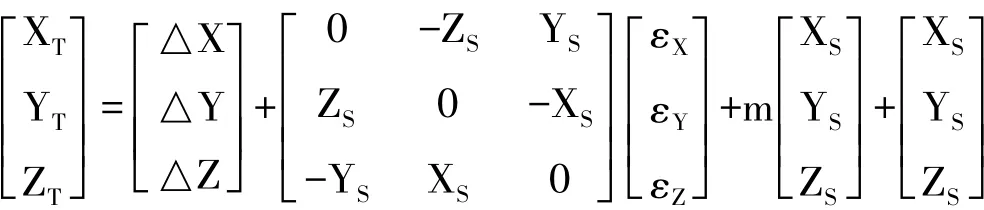
式中,3个平移参数[△X △Y △Z]T,3个旋转参数[εXεYεZ]T和1个尺度参数m。
坐标转换残差中误差统计如表3所示。
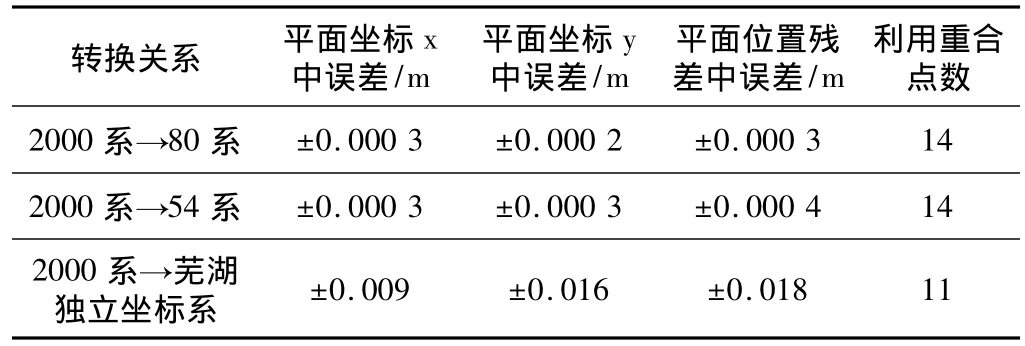
坐标转换残差中误差统计表 表3
2.3 精密水准网
水准测量采用DNA03电子水准仪,按二等水准标准往返测施测了72条路线,其中构网路线52条,支线20条,路线单线长度 498.5 km,观测了进行GPS测量的重合点有58个。
由于长江将测区分成了两部分,本次二等水准没有进行跨江测量。为了能向长江西岸传递高程,在长江两岸连测了2个国家二等水准点,2005年国家二等水准在此进行了跨江测量。内业在对这2个点进行稳定性分析后,利用国家二等水准路线 26.1 km,连通了长江两岸的水准路线。对联测的4个国家一等水准点采用以测代检方式进行了起算点的稳定性分析,经分析,两次高差之差均在限差范围内,所以作为起算点是稳定的。起算成果采用国家二期一等水准网复测成果。外业观测采用兰德HT-2680A手簿,加载国家测绘局第三大地测量队编制的水准测量外业记录软件,如果观测不符合二等水准要求,则仪器和手簿不进行数据记录,避免了人为误差。
水准概算进行了数据正确性与一致性的检核、水准标尺长度误差改正、正常水准面不平行改正、重力异常改正、固体潮改正、环闭合差计算及每千米水准测量全中误差计算。二等水准路线构成12个闭合环,用全部二等水准路线高差不符值计算的每公里水准测量偶然中误差为 ±0.6 mm,用经过各项改正后的高差计算的每公里全中误差为 ±0.33 mm,满足二等水准的限差要求。平差概算后的往返测高差中数为元素,待定点高程为未知数,测站数定权,采用间接平差法进行。平差后权(每公里)中误差为 ±0.34 mm,最弱点高程中误差为 ±2.70 mm。
2.4 似大地水准面精化
充分利用芜湖市及周边地区的重力点成果、数字高程模型、全球重力场模型及分布较均匀的GPS水准成果,采用重力法(Molodensky原理)及移去(remove)~恢复(restore)技术,实现芜湖市分辨率为2.5'×2.5'的1985国家高程基准及1956年黄海高程系下的高精度似大地水准面精化目的。
参考重力场模型选用美国最新研制的高精度、高阶次的EGM2008模型(2160阶次),完成2.5'×2.5'格网模型重力异常和2.5'×2.5'格网模型似大地水准面的计算。经过试算,采用Molodensky公式及EGM2008参考重力场模型,选择从 0 km到 100 km的积分半径(按5km间隔)进行区域重力似大地水准面计算:利用芜湖市均匀布设的37个GPS水准点,收集周边地区的18个GPS水准点,共计55个点,用于芜湖市似大地水准面的拟合,并且利用芜湖市均匀布设的15个外部检核点作为芜湖市似大地水准面的检测。首先使用70个GPS水准数据作为拟合数据,采用最小二乘配置方法进行计算。分析拟合点残差,未发现粗差点。并经多次计算,最终发现纠正积分半径为 35 km的重力似大地水准面的计算效果最好。本次计算同时顾及了地形质量对大地水准面的直接影响和间接影响。
在完成区域重力似大地水准面计算后,利用测区的GPS水准点成果将区域重力似大地水准面拟合适配于该区域的实测似大地水准面。分别采用最小二乘配置、BP神经网络、薄板样条等方法进行拟合纠正,选择最佳方案确定芜湖市似大地水准面模型。
利用多种方法进行拟合纠正的精度统计如表4所示。
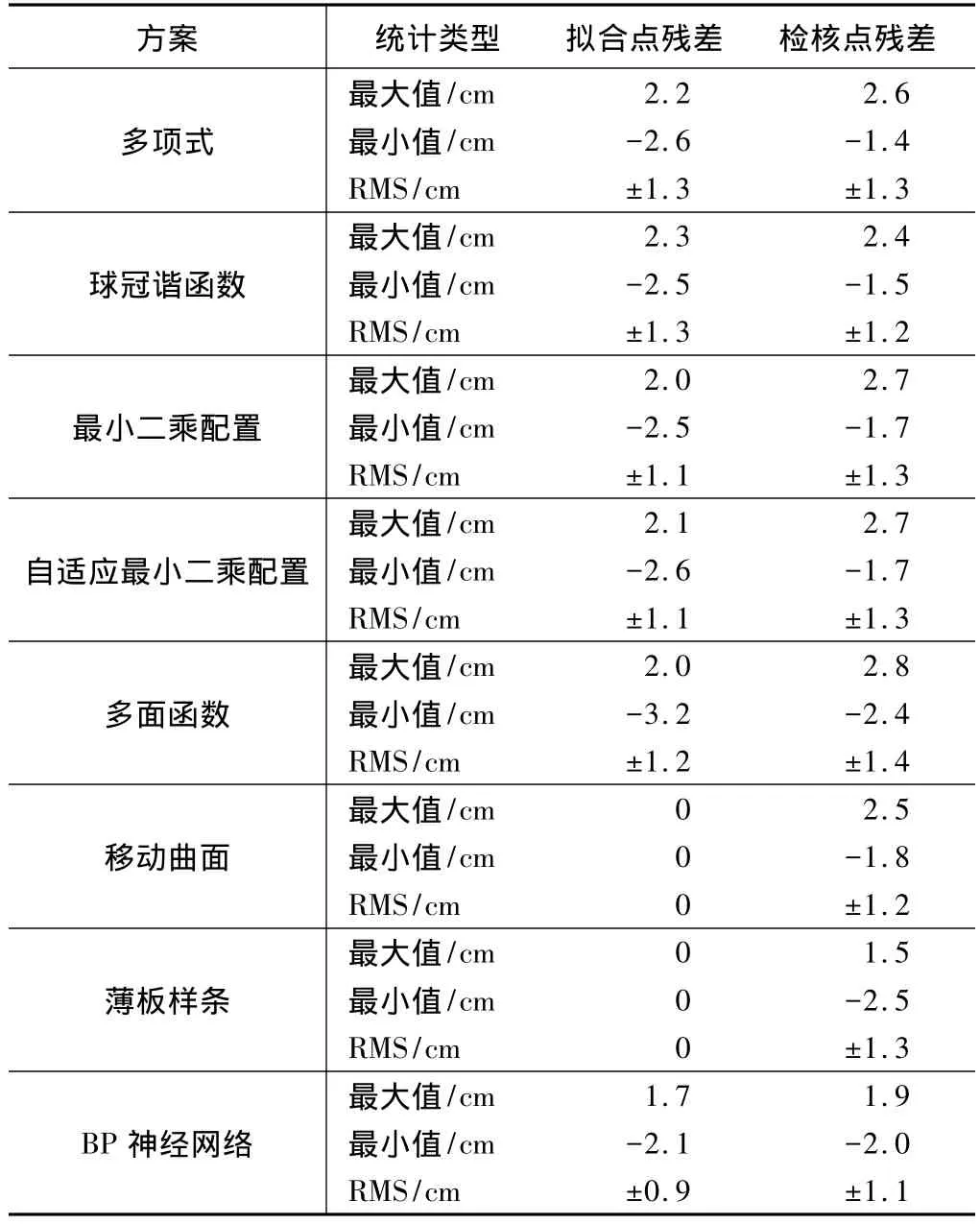
利用多种方法拟合误差统计结果 表4
为比较各种方案符合性,将基于自适应最小二乘配置的计算结果作为参考值,其他方案结果与参考值比较,差值如图2所示(POL代表多项式,SCH代表球冠谐函数,CO代表最小二乘配置,SP代表薄板样条,BP代表BP神经网络,MS代表移动曲面,HMS表示多面函数)
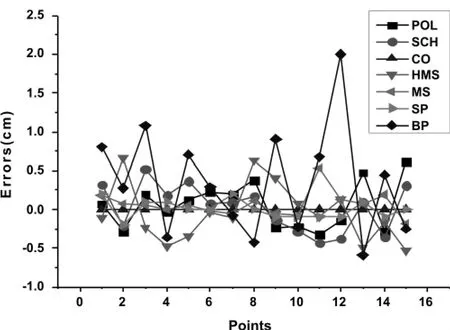
图2 各方案检核点互差图
由图2可知:各种方案的检核点成果与基于自适应最小二乘配置的成果符合性都较好。但是自适应最小二乘配置方法利用Helmert方差分量调整观测噪声与信号的协方差之间的比例,使二者对拟合结果的贡献更加符合真实情况,所以选择自适应最小二乘配置法作为最终似大地水准面拟合方法。
最终利用55个GPS水准点进行芜湖市似大地水准面拟合,15个外部检核点用作似大地水准面的检测;采用积分半径为 35 km的重力似大地水准面模型,顾及地形影响,利用自适应最小二乘配置法,获得芜湖市拟合精度为 ±1.1 cm,外部检核精度为±1.3 cm的高分辨率、高精度似大地水准面模型。
3 结语
芜湖市似大地水准面精化项目综合利用常规大地测量、卫星大地测量、现代地球重力场确定理论与方法,运用了多项国内、外先进的测绘理论与技术,首次建成了集平面、高程及似大地水准面模型等为一体、统一的芜湖市基础地理空间框架基准体系。在2000国家大地坐标系下,完成了芜湖市高精度GPS网的数据处理,整体构建了芜湖市不同坐标系统的坐标转换关系,并且建立了芜湖市高精度、高分辨率的似大地水准面模型。作为住建部立项的全国科技示范工程,精化成果于2012年2月通过安徽省测绘产品质量监督检验站的质检,并于11月顺利通过了住建部验收专家委员会的鉴定验收。芜湖市现代测绘基准体系的建立,使得芜湖市具有统一的平面、高程基准,必将大大提高GPS-RTK技术的快速应用,改变传统的高程测量模式,甚至代替三、四等水准,提高作业效率和降低成本,对基础测绘以及地理信息产业的发展具有重要的现实意义,也必将产生巨大的社会效益和经济效益。
[1]CJJ/T 73-2010.定位城市测量技术规范[S].
[2]芜湖市勘测院,芜湖市似大地水准面精化技术总结报告[R].
[3]芜湖市勘测院,武汉大学.芜湖市连续运行卫星定位综合服务系统基准站联测与系统检测报告[R].
[4]刘曦灿,牛守明,刘成宝等.济南市现代测绘基准体系建设[J].城市勘测,2009,1:11~13.
[5]郭春喜,伍寿兵,王惠民等.区域厘米级大地水准面的确定[J].测绘通报,2000,9:3~4.
猜你喜欢
中国水利(2023年19期)2023-11-09 07:56:50
中国水利(2023年17期)2023-09-25 07:42:10
中国水利(2022年20期)2022-11-18 06:26:32
北京测绘(2021年1期)2021-02-05 11:43:46
汽车维修与保养(2019年4期)2019-09-11 05:48:58
家庭影院技术(2018年11期)2019-01-21 02:20:42
水利与建筑工程学报(2015年6期)2015-12-21 07:45:46
测绘科学与工程(2013年6期)2013-03-11 15:07:54
测绘科学与工程(2013年2期)2013-03-11 15:07:29
测绘科学与工程(2013年2期)2013-03-11 15:07:28