
三维激光扫描仪点位精度检测研究
2013-03-06 10:12王鸣霄戴相喜王正强
城市勘测 2013年6期
王鸣霄,戴相喜,王正强
(南京市测绘勘察研究院有限公司,江苏南京 210019)
三维激光扫描仪点位精度检测研究
王鸣霄∗,戴相喜,王正强
(南京市测绘勘察研究院有限公司,江苏南京 210019)
三维激光扫描仪扫描作为一种新型的地物三维坐标快速获取手段,具有传统测量手段很多无法比拟的优势,具有广阔的应用前景。为了解其扫描所得点的实际精度,以便确定其适用领域,本文设计实验,采用三维激光扫描仪和全站仪重复测量的方法对其进行检测,得到三维激光扫描仪精度的基本情况,为确定其适用范围提供数据支持。
三维激光扫描仪;LiDAR;全站仪
1 引 言
地面三维激光扫描技术是整个三维数据获取和重构技术体系中最新的技术,真正做到了直接从实物进行快速的逆向三维数据采集及模型重构。无需作任何实物表面处理,就可以获得景深长、避免光学变形因素带来误差的实体表面位置数据,激光点云中的每个点的三维坐标数据都是直接采集的目标真实位置数据,进而使得供后处理的数据真实可靠。三维激光扫描技术正因为其获取速度快、精度高、实时性强、全数字化等特点,并且能够制作形式多样的数字产品等突出优势[1]。激光扫描测量仪器的精度也影响三维点云模型的建立和应用,因此地面三维激光扫描仪的检校与精度评估对于三维激光扫描仪的有效应用是十分必要的[3]。本文采用全站仪对同一测量区域分别使用地面激光扫描仪和全站仪进行重复测量,并选取几何特征点进行精度对比,初步得到三维激光扫描的扫描精度,为三维激光扫描仪进一步使用提供精度方面参考。
2 三维激光扫描仪工作原理
地面三维激光扫描系统由三维激光扫描仪、数码相机(可选)、扫描仪旋转平台、软件控制平台,数据处理平台及电源和其他附件设备共同构成。
目前市面上主流的三维激光扫描仪有脉冲式和相位式。其主要工作原理如1所示,首先由激光脉冲二极管发射出激光脉冲信号,经过旋转(震荡)棱镜,射向被测物体,然后通过探测器,接收并记录反射回来的激光脉冲[5],最后转换成能够直接识别处理的数据信息。
三维激光扫描仪的原始观测数据一般包括激光光束的水平角、垂直角、距离值、反射强度,如配备有数码相机,通过后期处理可匹配色彩信息。通过数据处理后的数据由大量离散的点组成,称为点云,包含信息有:点位坐标、反射强度和颜色信息(或灰度信息)。通过对点云数据编辑构建三维模型,以实现数据展示和应用。在数据采集和处理过程中主要的误差源有:点位误差(系统误差和偶然误差)和建模误差。本文通过对点云精度和模型精度的分析,分析总结通过三维激光扫描仪所获得的成果的精度情况。
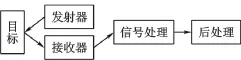
图1 地面三维激光扫描系统工作原理
实验采用Riegl420i三维激光扫描仪进行测试,性能如表1所示。
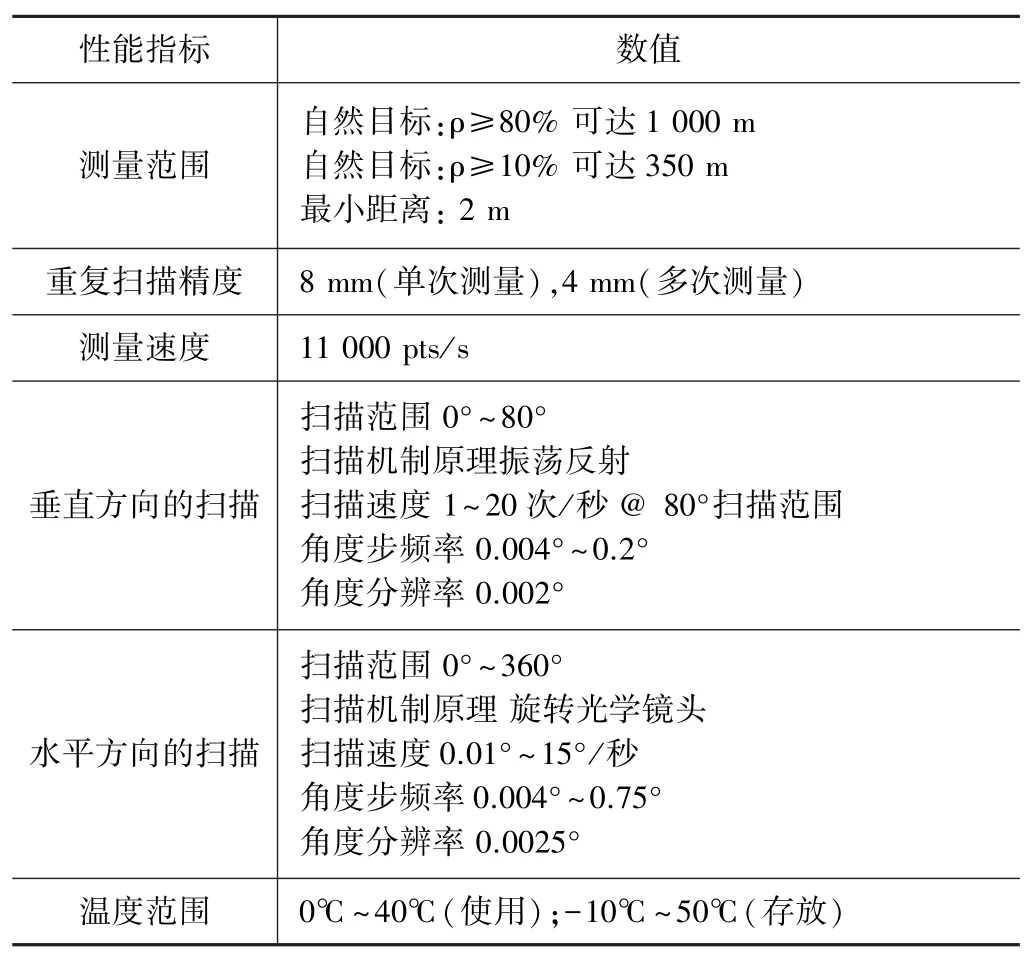
Riegl 420i激光扫描仪性能指标 表1
3 实验过程
本文三维激光扫描精度检测实验选择在工业厂区,对架空工业管道进行扫描、建模,然后进行精度对比。
3.1 点云精度检测
首先,在图2场景下利用支架布设10组平面标靶,每组为纵向5个标靶,具体要求如下:
(1)在布设标靶时利用全站仪控制每组标靶在同一垂线上,且在支架上均匀分布;
(2)标靶距离扫描仪距离应大于扫描仪最小观测距离,且小于标靶可判读距离;
(3)对于距离较远的标靶应布设在支架特征点处,以提高后续判读的可靠性。

图2 现场照片
而后,利用现场RTK控制点将50个标靶的中心点位测量到92南京地方坐标系和吴淞高程系下;同时利用3个点做坐标转换,将点云数据中的标靶中心坐标转换到92南京地方坐标系和吴淞高程系。
最后,将全站仪数据与点云数据进行坐标比对,结果见表2所示。

点位比较表 表2
点位差值中误差为:m0=±0.004 m
点位差值最大差值为:m大=0.012 m
Riegl 420i三维激光扫描仪的标称精度为±4 mm。本次实验标靶与扫描仪最大距离为30 m,结合标靶坐标比对成果和标靶至扫描仪的距离综合分析,扣除部分点判读影响,距离近的标靶扫描精度略高。建议对于高精度扫描不宜大于30 m。
3.2 模型精度检测
在项目模型的基础上利用免棱镜全站仪现场测量实体表面坐标,在内业将全站仪获取的坐标与建立的模型进行空间相对关系比对。主要比对的是点到模型的最近距离。在实验过程中分别选择平面(选择较平整建筑墙体)和圆管(选择工业架空管线)进行模型精度检测。
平面模型比对结果如表3所示。点位差值中误差为:m0=±0.024 m点位差值最大差值为:m大=0.058 m圆管模型比对结果如表4所示。
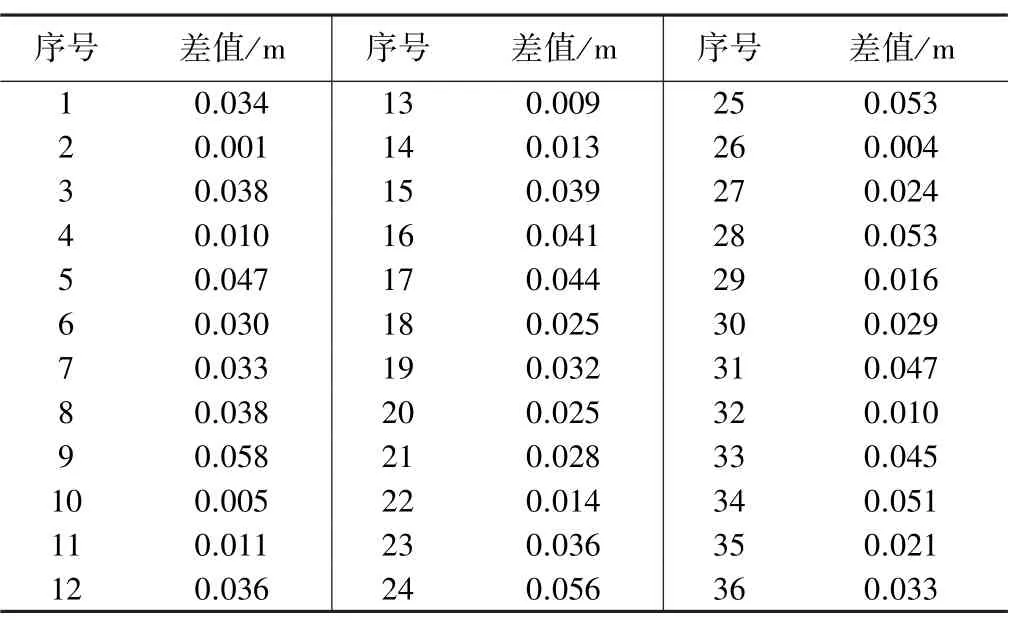
模型精度检查表 表3
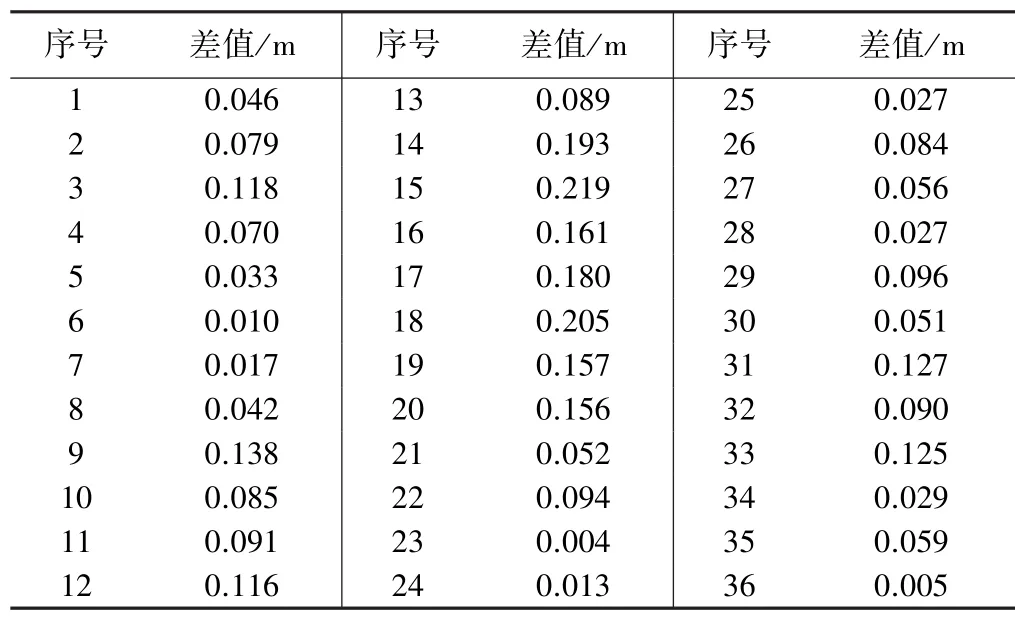
模型精度检查表 表4
点位差值中误差为:m0=±0.075 m
点位差值最大差值为:m大=0.219 m
综合考虑现场圆管变形等和墙体表面的凸凹等情况综合分析,模型精度可达到1∶500数字地图要求。
4 结 论
通过数据检测的信息表明,地面三维激光扫描系统获取的点云数据可以非常精确地测量出实体的尺寸大小。获取点云数据的单点位置精度和表现效果都明显优于传统的数字测图,完全可以满足大比例尺测图的要求。就野外测量而言,测量人员无需现场布设控制点、立尺或立棱镜等工作,就可获取足够的数据,这在很大程度上减轻了外业的劳动强度和作业时间。在内业处理上,内业人员可以借助于处理软件的功能,有针对性地选择处理目标,快速实现各种扫描结果的数字化,且扫描的结果具有重复应用的特性。
但是,本文所进行的试验均是在小范围内进行,未对影响激光点精度的多种干扰源进行独立分析;而且通过三维激光扫描所获取的数据较为丰富,同时导致数据量大,在数据处理时除了结合专业软件外对计算机配置和人员要求较高,在推广应用中还有待进一步研究。
[1] 刘浩,张冬阳,冯健.地面三维激光扫描仪数据的误差分析[J].水利与建筑工程学报,2012,10(4):38~41.
[2] 梅文胜,周燕芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010(1):53~56.
[3] 刘春,张蕴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[A].《测绘通报》测绘科学前沿技术论坛摘要集[C];2008,1~9.
[4] 张国辉.基于三维激光扫描仪的地形变化监测[J].仪器仪表学报,2006,27(6):96~97.
[5] 臧克.基于Riegl三维激光扫描仪扫描数据的初步研究[J].首都师范大学学报·自然科学版,2007,28(1):77~82.
[6] 张宏,胡明.三维激光扫描仪在地形测量中的应用[J].企业技术开发,2007,26(8):16~19.
Study on Detection of 3D Laser Scanner Positional Accuracy
Wang Mingxiao,Dai Xiangxi,Wang Zhengqiang
(Nanjing Institute of Surveying,Mapping&Geotechnical Investigation,Co.Ltd,Nanjing 210019,China)
3D laser scanner is a new fastmean to acquire 3d coordinates of ground objects,hasmany increasing incomparable advantages than traditionalmeasuringmeans and haswide application prospect.Aim to obtain the actual accuracy of its scanning data,so as to confirm its range of application;this paper designed an experiment,detection accuracy through surveying the same area using both 3d laser scanner and total station instrument,finally get the general accuracy information of 3d laser scanner,offer data support to confirm its application range.
3d laser scanner;LiDAR;total station instrument
1672-8262(2013)06-79-03
P237
B
2013—05—29
王鸣霄(1976—),男,高级工程师,主要从事大地测量、精密工程测量等方面工作。
猜你喜欢
航天制造技术(2020年4期)2020-09-11
模具制造(2019年3期)2019-06-06
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
测绘工程(2018年3期)2018-03-20
测绘科学与工程(2016年4期)2016-04-17
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
