陪护机器人
——呵护老人生活的好伴侣
2013-02-24 02:45陶永王田苗孙书仑刘加郑春晖郑世杰梁旭张欣
机器人技术与应用 2013年5期
陶永 王田苗 孙书仑 刘加 郑春晖 郑世杰 梁旭 张欣
(1. 北京航空航天大学, 北京,100191; 2. 北京凯艺玩具有限责任公司,北京,101100;3. 清华大学,北京,100083; 4. 沈阳新松机器人自动化股份有限公司,沈阳,110168;5. 北京机器时代有限公司,北京,100096; 6. 大连交通大学,辽宁大连,116021)
陪护机器人
——呵护老人生活的好伴侣
陶永1王田苗1孙书仑2刘加3郑春晖4郑世杰5梁旭6张欣1
(1. 北京航空航天大学, 北京,100191; 2. 北京凯艺玩具有限责任公司,北京,101100;3. 清华大学,北京,100083; 4. 沈阳新松机器人自动化股份有限公司,沈阳,110168;5. 北京机器时代有限公司,北京,100096; 6. 大连交通大学,辽宁大连,116021)
针对老年人的心理需求和使用要求,研制开发高、中档系列化老年人陪护机器人产品。突破多项关键技术,填补国内老人陪护机器人产品的空白,探索为老年人提供心理慰藉的新模式和新概念,引导老年人陪护机器人产品的发展,为解决我国人口老龄化等带来的重大社会服务问题奠定基础。
陪护机器人,声纹识别,欠驱动
1 前言
1.1 需求分析
随着我国老年人数量的增加,“421”家庭数量激增,调查显示:全国有35%的家庭要赡养4位老人,49%的城市家庭要赡养2-3位老人。
中端陪护机器人具有仿真动物宠物的毛绒外观,手感良好,并具有细腻的动物仿生动作,及动物的逼真反应如带有不同情绪的叫声、被爱抚时的喜悦动作、被冷落时的伤心等,老人将其抱在怀中进行抚摸或拍打,可以达到真实宠物的陪伴效果,同时避免了养宠物所具有的卫生、安全等方面的不利因素,从而在精神上缓解老人孤独、焦虑的内心感受,达到辅助心理康复的效果。

图1 中端陪护机器人的需求分析
服务机器人技术作为一种极具竞争力的前沿高技术,越来越受到各国政府和大企业的重视。随着机器人技术的不断发展, 机器人的用途越来越广,已经开始从传统的工业领域向军事、医疗、服务等诸多领域渗透[1]。在机器人领域,正经历着从产业用机器人时代向生活用服务机器人时代的转变。陪护机器人作为服务机器人的一种,是新兴的机器人种类,美国、英国、法国、德国等发达国家已经开始投入大量资金进行研制。
1.2 国内外现状
日本面临老龄化社会的压力较重,因此投入了大量的人力物力进行陪护型助老机器人的研究,并取得了一定的成果。如:日本产业技术综合研究所(AIST)的柴田崇德研制出面向老人的海豹型陪护机器人PARO,该陪护机器人可以感受到主人对不同部位的触摸,产生相应的交互反应,调整动作,并可以感受外界的声响以及辨识主人的声音和命令;日本索尼公司的机器宠物狗“爱宝”(AIBO),能够精确感知与外界物体的距离,具备发声、声音处理器能力;日本名古屋市商业设计研究所开发的“ifbot” 机器人能够理解人的感情并能与人沟通;松下电器开发了面向老年人的宠物机器人“泰迪(Teddy)熊”,可与老人进行连续性的对话;日本欧姆龙公司开发了完全仿真的、能够与人交流的人工毛皮新型机器人宠物猫——尼克罗(NeCoRo),集成了机器人传感、控制和人工智能技术,能够对主人的触摸产生反应并表达自己的感受[2-5]。
美国密歇根大学、匹兹堡大学和卡内基-梅隆大学组成的联合研究小组开发的专门照料老人的机器人护工“珀尔”,会适时提醒、建议老人做各种事情,还可以担当老人的引路员。
综上所述,一些发达国家尤其是日本非常重视面向老年人的智能陪护型机器人的研究,已经开发出少量实验样机,少量的高端产品开始进入市场。国内面向老年人的陪护型机器人的研究尚处于起步阶段,由于成本、功能等的限制,还没有形成产品。
1.3 本文提要
根据老年人的需求和心理特征,研究陪护机器人的语音、视觉、驱动、控制等核心技术,为研制低成本、高仿真度的中端陪护机器人和多功能的高端陪护机器人机构奠定基础。
面向广大用户市场,研发价格适中、适合老年人需求的、与真实动物之间具有高度仿真相似的中端陪护机器人,设计基于欠驱动结构的仿生关节,实现低成本的机器人控制模块、语音交互模块、触觉感知模块、运动模块、通信和信息交互模块。机器人选用符合老年人心理的仿真宠物外观造型,实现逼真的动物仿生造型和动作表现,具有丰富的人性化语音交互内容、多种娱乐形式、日常生活提醒等功能,能够通过USB通信接口连接到用户电脑,对机器人进行内容更新。
研发适合老人需求的多功能高端陪护机器人。该陪护机器人具有高仿真度的人形外观,能够实现简单的位置移动,在敬老院的公共区域与众多老人进行语音交互,具有基于语音的说话人身份识别能力,并可为老人提供血压、脉搏、体温等生理状态的检测与报告,为不同老人建立数据库档案,了解和学习老人的身体状况和心理需求,进而根据不同老人的情况提供个性化服务;构建界面友好的高端陪护机器人远程网络交互控制平台,老人可通过网络与家人或朋友进行音视频情感交流,减轻内心孤独感觉;社区(敬老院)医疗中心的医生通过陪护机器人可与老人进行音视频交互、老人生理参数的无线传输,并提供医疗咨询与帮助,紧急情况下可及时报警或通知亲人。
2 陪护机器人研发
2.1 中端陪护机器人
2.1.1 外观造型设计
老人对事物有着返璞归真的心理追求,对外观的抽象性和复杂性的要求不是很高,简洁大方的外观设计可以带给人朴实和沉稳的感觉。因此,中端老人陪护产品是一只可爱生动的宠物狗外观,会做很多动作,亦可被软软地抱在怀中,嘴部可以张开,有很多情感反应,眼睛采用刺绣工艺实现,即安全又美观。

图2 中端陪护机器人的基本外观设计及实物设计
2.1.2 机械结构部分设计
机械部分的设计包括对仿生动作统计、列表,利用仿生学知识研究实现动作的肌体原理,设计3路马达的分区控制以及各部分机构的设计,如图3所示。
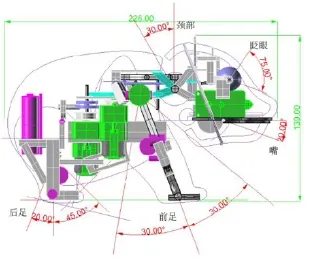
图3 陪护机器人机械结构方案
(1)手臂欠驱动结构设计
手臂欠驱动结构:设计一种具有仿生结构的双臂,使陪护机器人能够在感觉到有抚摸腹部动作的时候,可以做出类似小猫抱住人手的动作,这样能够更好地提升陪护机器人与老人的亲密程度。
这种手臂仿生结构是一种基于拉线结构的欠驱动手臂,对于被抓取物体具有形状自适应的能力,同时这种结构还具有简单紧凑、重量轻、成本低、驱动元件数量少、控制变量少、出力明显、抓取物体范围广泛等优点。欠驱动手臂的非直接驱动关节可以通过被动柔顺和被抓取物体表面的机械约束来实现被动驱动,从而手臂抓取物体的适应性、稳定性、抓取力都优于常规机械手臂的效果。
(2)动物仿生学动作整理及优化
仿生学研究包括对仿生学动物进行研究,分析仿生动物经常出现的基本动作,研究动物骨骼,以捕捉到动物肢体动作的正确轨迹; 时段性观察动物的行为,对出现的各种动作进行记录整理列表; 测定各动作的幅度及各部位运动中所形成的角度;进行运动分析、简化。
(3)机构设计及受力分析
按基本动作对马达相位进行分配,以最小马达数实现连贯流畅的动作,将沿圆周不断展开时的角度与力臂关系引入公式,计算出轨迹方程,并进行校验。
(4)仿生机构的拓扑分析及设计优化
对具体各部位的结构设计进行优化,以达到每个动作的最佳表现形式,实现在较小的电力需求的情况下,完成较生动完善的仿生动作。
2.1.3 运动控制系统设计
宠物陪护机器人的运动控制系统在真实动物运动姿态的基础上,应用柔性欠驱动技术,实现低成本、高仿真度的驱动结构和运动。
(1)通过观察动物运动习惯,对出现的各种动作进行记录整理列表,模拟动物动作序列轨迹建模,依照动物仿生学对基本动作进行整理、概率取舍及动作组合优化,选取具有较强表现力的基本动作。从结构上对所整理的真实动作进行初步的模拟、仿真,列举实现方案并进行方案的优化,确认动作实现的难度,结合结构实现的难易程度,对动作列表进行取舍,保留结构上较易实现的动作,以达到仿真与可靠的最佳结合点。对最终保留的动作进行拆分,将组合动作拆分为不同基本动作的组合,如图4,以动作组的方式分割动力源,以达到最佳的分配方式及最好的表现形式,如图5所示,对动作分配不断进行调整,以达到最佳效果。

图4 动作拆分方案
(2)按所拆分的基本动作的内容,对马达相位进行分配,以最少马达数实现连贯流畅的动作。图6列出了表情马达和肢体马达负责的所有基本动作及其相位值。

图5 运动控制系统机械设计

图6 表情马达与肢体马达基本动作相位值
2.2 高端陪护机器人
2.2.1 高端陪护机器人底盘设计与研制
机器人采用双轮差动结构,为保证机器人的运动性能,采用具有悬挂弹簧减震系统的框架式机器人底盘结构,使其运动能力增强,适合在非平整地面上运行。采用铝合金框架结构,减轻机器人的重量,并可灵活调整支撑立柱位置,以适应内部因器件改动而引起的结构变动。
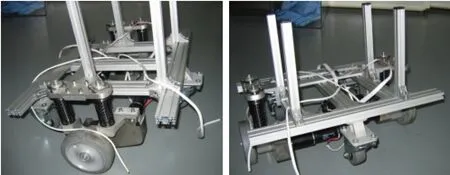
图7 高端陪护机器人底盘
2.2.2 运动控制系统研究
采用TI公司的TMS2407芯片实现对两路电机的控制,通过串口与上位机进行通信,实现参数设置、电机控制、自保护、关键参数反馈等功能。
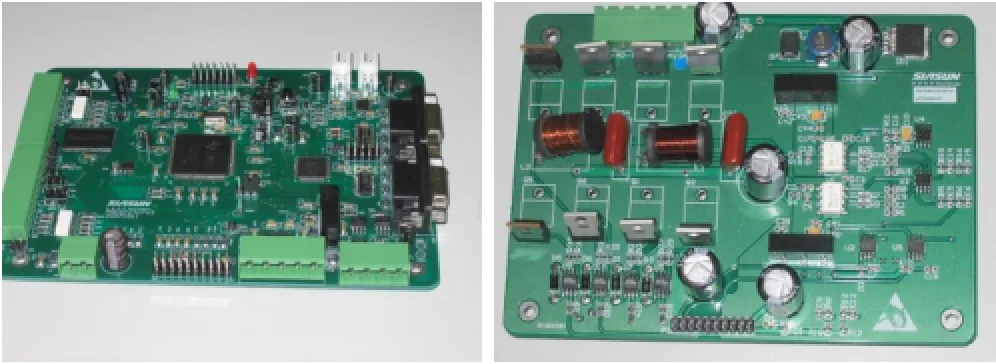
图8 硬件系统
2.2.3 软件设计方案

图9 运动功能调试软件界面
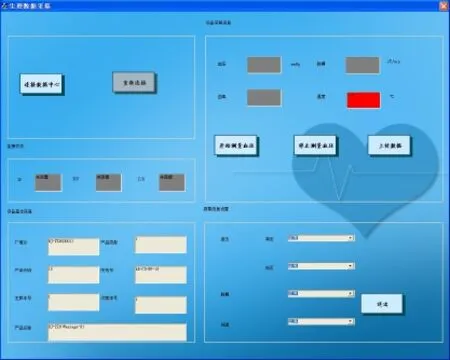
图10 软件功能实现

图11 高端陪护机器人整机结构
针对在高端陪护机器人本体上运行的软件(包括工作界面软件与调试软件)进行详细的功能界定与接口定义,具体包括用户界面设计(包含人的语音识别[6](身份)设置界面、生理参数检测与显示界面、远程音视频交互界面、远程医疗诊断界面、老人娱乐、提醒功能界面)与相应模块所要实现的功能定义[7],通信协议(包含串口通信协议、网络通信协议)的初步规划,应用程序接口(包含语音识别、合成与身份识别程序、语音对话脚本设计与语音识别程序接口[8]、语音方向识别程序接口、生理信号采集程序接口、机器人基本运动控制接口)的详细定义以及相应模块所要实现的功能定义。
2.3 高端陪护机器人整机制作
如图11所示,机器人外罩上端为12寸触摸显示器,后面具有可调节角度的金属固定支架,适应不同身高的用户需要。聊天摄像头安装在显示器下方的茶色透明玻璃内。4个麦克风安装在摄像头两侧,检测不同方向的声音。医疗检测模块放在中间的抽屉中。2个声纳传感器安装在上部,6个声纳传感器安装在下部,用于距离探测。8个红外传感器安装在下部,当物体具机器人20cm以内时会发出警告。最下面黑色部分是避碰条,当其碰到障碍物时机器人自动停止运动 。前方中部的按钮是关机按钮,长按4s后DSP会向主板发出信号,配合程序实现Windows关机,防止经常非法关机对文件系统的损坏。
3 陪护机器人功能与应用示范
3.1 中端陪护机器人
采用宠物仿生柔性欠驱动结构,通过不多于3个电机实现不少于20个关节运动,动作幅度与接触力符合老人操作习惯;基于嵌入式语音识别软件或语音识别片上系统,可通过输入文字在线更新语音识别语句,识别率≥97%;可下载MP3等格式娱乐音频文件进行播放,可通过USB接口下载后台网站的娱乐节目;重量≤3公斤,电池可连续工作≥3小时;形态采用友善和蔼的熊猫等毛绒动物外观,具有良好的手感;可定时提醒:针对老人不同的使用特点,每天进行不少于5次的吃药、吃饭等日常生活提醒,并能对提醒的时间、方式、次数等进行设定。
3.2 高端陪护机器人
具有说话人(声纹)识别功能,说话人识别正确率大于95%;基于声纹识别和视觉人脸识别的特定老人识别功能,建立老人个人数据库,包括老人基本情况、亲情信息、身体参数等;老年人身体健康检查功能:检测老年人血压、脉搏、体温等生理状态,结合老年人身体健康记录,建立老年人身体健康检查专家数据库系统,提供健康状态提示;远程看病功能:具体远程音视频和老年人生理状态实时传输功能,无线视频传输速率≥30帧/秒,信息可以直接远程传送到医院和社区医疗中心,医生可以根据老年人实时状态做出初步诊断,方便老人看病;聊天功能:老人与陪护机器人交互聊天、与亲人之间的无线音视频亲情交流。

图12 中端陪护机器人
4 未来展望
助老助残机器人已经在北京市海淀区四季青镇敬老院和上海市第一社会福利院成功得到示范应用,取得了良好的用户使用反馈。未来助老助残机器人研发与应用示范课题组还要进一步做好中、高端陪护机器人产品在敬老院、福利院的应用示范和后续维护,为老人提供满意的服务;进一步加强陪护机器人产品的研发和市场化推广销售,为广大老年人提供生活照料及护理,提高老年人的生活自理能力以及生活品质;缓解家庭和社会的压力,为解决我国人口老龄化等带来的重大社会服务问题奠定基础。

图13 高端陪护机器人
[1] 王田苗, 陶永, 陈阳. 服务机器人技术研究现状与发展趋势. 中国科学∶ 信息科学, 2012, 42∶ 1049-1066
[2] Gannot S,Burshtein D,Weinstein E.Signal Enhancement Using Beamforming and Nonstationarity with Applications to Speech. IEEE Transactions on Signal Processing, 2001,49(8)∶1614-1626
[3] Liu P X,MengM Q H,Liu P R,et al. An end to end transmission architecture for the remote control of robots over IP networks [J]. IEEE/ASME Transactions on Mechatronics,2005,10 (5)∶560-570.
[4] Sim K B,Byun K S,Harashima F. Internet-based teleoperation of an intelligent robot with optimal two-layer fuzzy controller[J].IEEE Transactions on Industrial Electronics, 2006,53 (4)∶1362-1372.
[5] Uchimura Y,Yakoh T. Bilateral robot system on the real-time network structure[J]. IEEE Transactions on Industrial Electronics,2004,51(5)∶940-946.
[6] Zhang W Q,He L, Deng Y, et al.Time-frequency cepstral features and heteroscedastic linear discriminant analysis for language recognition. IEEE Transactions on Audio, Speech, and Language Processing, 2011, 19∶266 -276.
[7] Tao Yong, Wang Tianmiao, Wei Hongxing, and Yuan Peijiang. A Behavior Adaptation Method for an Elderly Companion Robot—Rui. ICSR2010 ∶141-150.
[8] Liang Xu,Wang Dongjiao,Huang Ming. Improved sentence similarity algorithm based on VSM and its application in question answering system. 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems, ICIS 2010∶368-371.
猜你喜欢
保健医苑(2022年1期)2022-08-30
保健医苑(2022年6期)2022-07-08
保健医苑(2022年4期)2022-05-05
小学生作文(低年级适用)(2018年3期)2018-04-17
海峡姐妹(2018年1期)2018-04-12
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07