
IMU/GPS辅助ADS80数字航空摄影测量系统的技术研究
2013-02-19 05:14吴克友朱传勇
地理空间信息 2013年3期
乔 炜,吴克友,朱传勇,单 静
(1.武汉市测绘研究院,湖北 武汉 430022)
ADS80机载数字航空摄影测量系统是由徕卡公司引入中国的一套较先进的推扫式线阵数码航空影像摄影测量系统。ADS80集成了高精度的惯性测量单元(IMU)和全球卫星定位系统(GPS),在航摄影像拍摄的过程中同时获取相机推扫线阵的精确定位信息。本文结合ADS80数字航空摄影测量系统的特点,探讨了航测生产中的技术问题。
1 ADS80数字航空摄影测量系统
1.1 ADS80相机
ADS80集成了IMU和GPS,采用12 000像元的三线阵CCD扫描和专业的单一大孔径镜头,一次飞行可以同时获取前视、下视和后视的具有100%三度重叠、连续无缝的、具有相同影像分辨率和良好光谱特性的全色立体影像以及彩色影像和彩红外影像。
ADS80相机每条CCD为12 000像元,像元大小为6.5 μm,按照前视27°、下视0°、后视14°分为3组排列。前视包括1条单独的全色CCD,下视包括1对相错0.5个像素的全色CCD和红、绿、蓝、近红外等各1条CCD,后视包括1条单独的全色CCD和红、绿、蓝、近红外各1条CCD。ADS80数字航空摄影测量系统的部分参数见表1和表2[1]。
1.2 ADS80数码影像数据结构
用于航测内业的ADS80数据主要为L1级数据:*.sup——路径文件,记录影像路径、相机文件路径、空三加密文件路径等影像相关文件路径。
*.ads——航线信息和影像索引列表文件,由于ADS80航带航向距离长,造成单航线tif格式数据量过大,因此单航带数据会被分割为若干幅相邻的影像*.tif,*.ads用于记录该航线被分为哪几幅相邻影像的名称和整条航线的数据量信息。
*.cam——相机文件,记录各个镜头的相机参数。
*.odf——空三加密文件,一条航线的一个镜头记录为一个*.odf文件,*.odf内容为该航线中每条线阵的外方位元素。
*.tif——ADS80航空影像,记录影像信息,软件通常不直接读取*.tif信息,而是通过*.ads进行统一管理和读取。
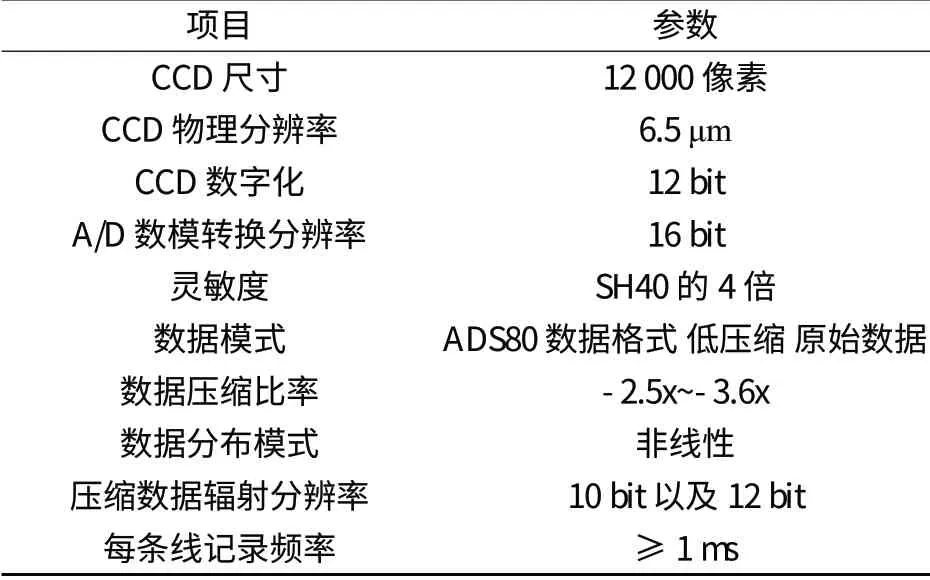
表1 ADS80系统基本参数
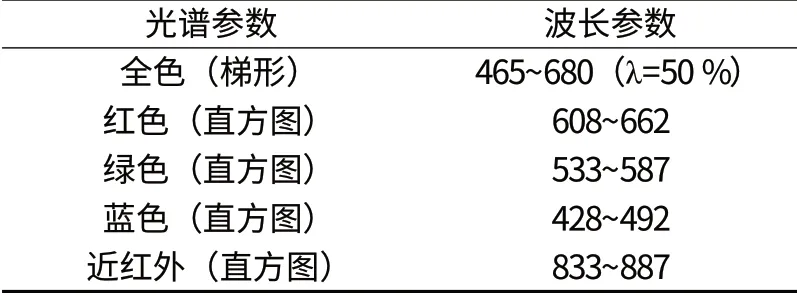
表2 ADS80镜头光谱基本参数
2 IMU/GPS辅助空中三角测量
2.1 IMU/GPS辅助系统
IMU/ GPS辅助航空摄影测量是指利用装在飞机上的GPS接收机及其定位技术获取航摄仪的位置参数,应用与航摄仪紧密固连的高精度IMU直接测定航摄仪的姿态参数,通过IMU/GPS数据的联合后处理技术,获得测图所需的每张相片高精度外方位元素的航空摄影测量理论、技术和方法。GPS的辅助功能可通过与地面同步接收GPS数据的已知基站差分和GPS精密单点定位2种技术实现。
IMU/GPS辅助空中三角测量和普通空中三角测量的精度相当,我们直接对ADS地面数据处理系统Gpro预处理的数据进行光束法平差解算。ADS80数码影像的空中三角测量需要在具有线中心投影模型的Orima或者PF系统中处理,这类系统采用了特殊的解算技术,使相片加密计算得到优化,支持摄影资料的GPS、IMU数据,能对与加密点有关的影像数据进行多窗口量测,能够自动地进行粗差探测与剔除,自动化程度高,是目前世界上少数几套集自动采集数据、整体平差一体化的ADS80自动空中三角测量软件[2,3]。
2.2 精度分析[4,5]
分别对这2种方案布设不同数量的像控点,对1∶2 000实验区进行空三加密计算,并通过50个检查点检核各个实验区精度。具体方案为:有地面基站的进行无像控点、1个像控点、4个像控点、5个像控点、9个像控点;利用精密单点定位技术的进行无像控点、1个像控点、4个像控点、5个像控点、9个像控点。各项计算精度指标如表3所示。
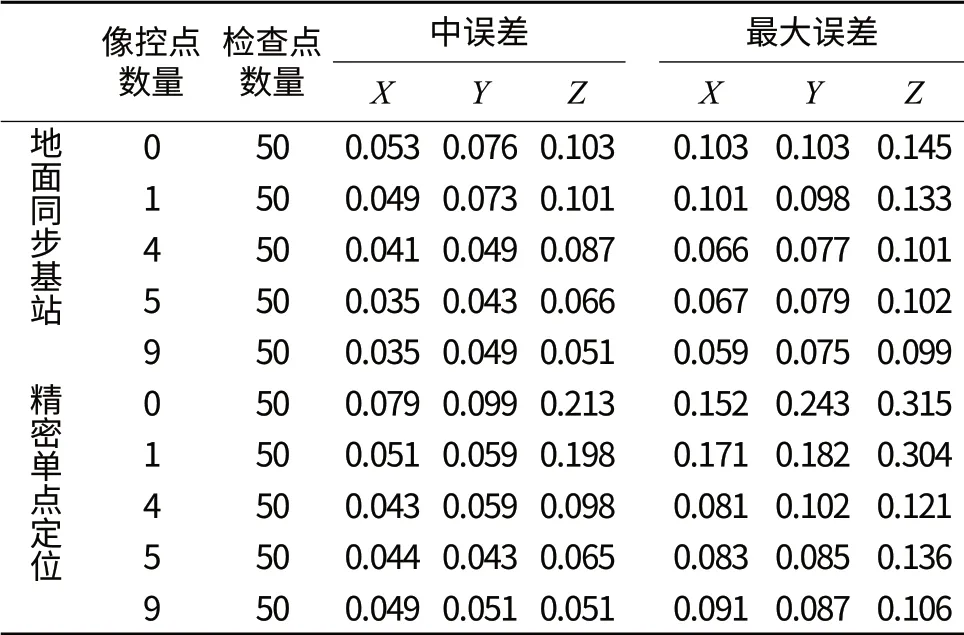
表3 不同像控点布点方案空三加密检查点精度比较表/m
利用地面同步基站数据解算IMU/GPS获取的定位数据进行空三加密的测区,控制点个数对空三加密精度结果基本没有影响。利用GPS精密单点定位解算IMU/GPS获取的定位数据进行空三加密的测区,随着控制点数量的减少空三加密精度会逐渐降低。
通过本实验并结合大量生产实践,采取地面同步基站的差分GPS技术,无像控点空三加密精度满足1∶500规范要求精度。采用精密单点定位的GPS技术,无像控点空三加密精度满足1∶1 000~1∶2 000的丘陵地至高山地规范要求的精度,若想满足1∶500~1∶2 000全部地形精度要求,则建议在测区内布设至少4个像控点,可使加密区精度显著提高。
2.3 ADS80航空摄影测量系统的优势
ADS80利用高精度IMU/ GPS系统大量减少了外业像控点布设的工作量;ADS80可同时获取多种光谱数字影像,具有较高的地面分辨率和辐射分辨率;ADS80采取的推扫式影像获取方式较面阵数码影像减少了影像接边数量,避免了接边过程中造成的误差,提高了地形图的成图精度。
3 后期数据处理方法和注意事项
3.1 数据处理软件平台[6,7]
1)空中三角测量软件。国内较常使用的主要有徕卡公司的Gpro、Orima软件和法国研发的像素工厂。
2)摄影测量工作站。国内较常使用的主要有徕卡公司的LPS和航天远景的Mapmatrix。
3)正射影像制作软件。国内较常使用的主要有法国研发的像素工厂和德国研发的Inpho。
3.2 系统转换
1)平面坐标系转换。采用三维七参数法,因为ADS80数字航空摄影测量系统获取的GPS数据是WGS84坐标系下的三维摄站坐标,需要将其转换至实际需要的地方平面坐标系、北京1954坐标系或西安1980坐标系。三维七参数的获取一般有2种途径:一是基于统一的坐标框架和历元,一次获取区域范围的固定七参数,适用于较大面积区域;二是根据航飞范围内的已知基站点及其成果,解算该区域的转换参数,俗称“点校正”,适用于较小面积区域。考虑到航空摄影一般涉及的区域面积较大,因此推荐第一种途径。
省、市应完善地方坐标系统,建立与2000国家大地坐标系(CGCS2000)的联系。武汉市现代测绘基准体系建设项目建立了由288个高精度GPS点构成的、覆盖全市域的高精度GPS网,平均点间距8.6 km,准确获取它们的北京1954坐标系、西安1980坐标系平面及CGCS2000地心坐标成果以及任意2个坐标系之间的转换参数,转换精度达到±3 cm。
2)高程坐标系统转换。无论采用GPS精密单点定位、实时动态定位技术还是事后差分处理,机载GPS高程成果均为大地高,此时需要利用该区域的高精度似大地水准面精化模型成果对GPS大地高进行高程异常改正,从而得到任意点的正常高值。以武汉市为例,区域似大地水准面精化工程建立了覆盖全市域的高精度、高分辨率(2′30″×2′30″格网)似大地水准面数值模型,内符合精度为±0.6 cm,GPS/水准外部检核精度达到了±0.7 cm。
4 结 语
通过分析实验结果和总结多年航测生产经验,笔者对IMU/GPS辅助ADS80数字航空摄影测量系统在实际应用中的技术问题归纳如下:
1)影像航向重叠度高,提高了连接点的匹配精度,使得空三加密结果更加可靠。INU/GPS辅助ADS80数字航空摄影测量系统可根据不同比例尺成图需要,在空三测区内适当布设0~4个像控点就可以满足精度要求,大大减少了外业像控点量测的工作量。
2)大基高比解决了数码航空摄影测量的高程精度问题。
3)三线阵分别组成的立体像对,可从多个视角对地物进行观测,减少影像遮挡范围,使得外业补测工作量减少。
4)ADS80相机采用单一镜头进行拍摄,避免了一般数码航摄相机采用多个镜头获取影像后的拼接问题。
5)基于IMU/DGPG辅助的数字航空摄影测量系统,空三加密若采用4个像控点布设方法,其整体精度可以满足1∶500~1∶2 000航测内业成图要求。
6)由于飞机姿态不稳定可能造成ADS80相机推扫式影像获取不连贯,导致影像遗漏像素。这类问题可能造成影像上地物的缺失,如何快速发现并解决此类问题是ADS80相机面临的一个紧迫任务。
[1]赵德文. ADS40数字传感器的摄影测量处理与应用[J].铁道勘察,2009(2):22-25
[2]王海涛,武吉军,冯聪军,等.徕卡ADS40—ADS80数字航空摄影测量系统[J].测绘通报,2009(10):73-74
[3]高立.ADS80航空摄影测量系统的特点与应用[J].测绘与空间地理信息,2011,34(6):212-214
[4]刘军,王冬红,张永生,等.IMU/DGPS辅助ADS40影像直接定位及其精度分析[J].武汉大学学报:信息科学版,2008,33(11):1 138-1 141
[5]杨庚印.徕卡ADS80数字航空相机的精度验证和技术探讨[J].测绘通报,2010(8):73-74
[6]许大力.徕卡ADS80数字航空摄影测量系统在大比例尺地形图航测工程中的应用[J].中国科技信息,2011(8):50-51
[7]陶长志.ADS40数字航空摄影在阜新市航测中的应用[J].测绘与空间地理信息,2011,34(4):180-181
猜你喜欢
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
航空知识(2019年1期)2019-01-11
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
企业科技与发展(2018年5期)2018-09-10
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
