
无人机航摄系统在大比例尺成图中的应用
2013-02-19 05:14罗先权
地理空间信息 2013年3期
罗先权,罗 甫
(1.国家测绘地理信息局 重庆测绘院,重庆 400015)
1 实例与分析
1.1 项目背景
2011年5月某单位欲对水库区域进行旅游风景区开发总体规划设计,需要对水库周围18 km2范围内进行1∶2 000大比例尺地形图测绘。测区最高点高程约为1 600 m,最低点高程约为900 m,东西长约8.1 km,南北长约6.1 km。测区属于东褶皱带边沿地带,巫山大娄山中山地区,因其交通不便、通视较差、控制点难布设,常规数字化测图难以按时、按质完成任务,且不能直观地反映出测区内的交通、植被、水系、居民地及人文景观等旅游风景区资源的位置与分布情况。无人机航摄系统不仅能优质高效地获取测区内高分辨率数码影像,而且能生产旅游景区开发规划设计所需的1∶2 000数字线划地图、数字地面高程模型和数字正射影像图。
1.2 设计流程
本次数据采集技术路线设计,如图1所示。
1.3 无人机航摄系统实施情况
由于测区地势东高西低,高差约为700 m,航摄区域分为2个摄区,共8条航线,如图2所示。根据技术设计书要求和测区地形条件,制定数据采集方法,如表1所示。
1.4 无人机航摄系统的特点
此次航摄采用CKGY型无人机双拼相机系统,飞行平台为固定翼单发弹射型无人机,其特点为:

图1 作业流程设计图
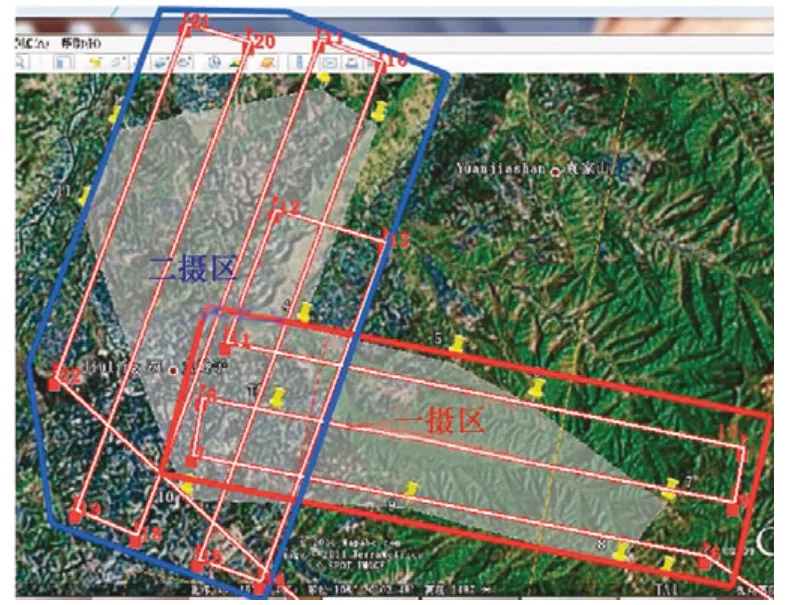
图2 摄区划分及航线布置图
1)有效巡航时间大于1.5 h,能完成测区内2个航摄分区的航摄任务。由于测区内的2个航摄分区航高不同,为能实现一个飞行架次完成所有航摄任务,采用了变高飞行,即在完成第1个摄区的航摄任务后,设定缓冲航线将无人飞机降到第2个摄区的高度,再继续进行航摄。

表1 航摄技术参数表/m
2)弹射起飞,伞降回收。发射和回收系统能在复杂地区方便地找到合适的起降场地,有效地扩大了无人机航摄的使用范围。
3)双拼相机系统。双相机系统采用2个佳能5D Mark II数码相机,按一定的角度组合在一起,同步曝光所得的2张影像纠正后形成1张拼接影像。拼接后影像较单相机获取的影像覆盖范围更广,基线长度更长,有效地增加了基高比,提高了立体测量的高程量测精度。
1.5 无人机航测成果
经过外业像片控制点测量、内业空三加密后,利用立体测图三维矢量数据构TIN生成DEM,利用该DEM和空三成果微分纠正得到单片正射影像。正射影像经过拼接、匀色、镶嵌、影像处理、图幅裁切后得到DOM成果。经数据加工处理,将立体测图数据符号化后叠加DOM,按设计要求生成调绘片并进行晒印,依据晒印的调绘片完成外业补测、调绘、平面位置和高程注记检测等工作。经检查1∶2 000 DLG (如图3所示)和1∶2 000 DOM(如图4所示)套合精度良好,图面较为清晰,无明显拉花、拼痕等问题。由于CQCORS在大重庆范围内的有效覆盖,可以同步实施基础控制点测量与地物和地貌等特征点的检查。对立体测图成果按照外业调绘成果进行属性录入、图面编辑处理等操作,将基础控制点上图,经专职人员检查整理后,提交最终成果正射影像总图(如图5所示)。

图3 1∶ 2 000数字线划图

图4 1∶2 000正射影像图
1.6 成果检查及精度分析
本次检测采用4台中海达V系列CORS RTK系统:1台作为基站,3台作为流动站。其标称精度平面为±10 mm+1×10-6D,高程为±20 mm+1×10-6D。主要检查点分布在作业区域内,数量多,分布广,具有代表性。对电杆、房角、道路交叉处、田坎交叉处等地物地貌特征点且易于误判的地方进行坐标数据采集,并在图纸上标注测点位置以便于进行坐标对比。
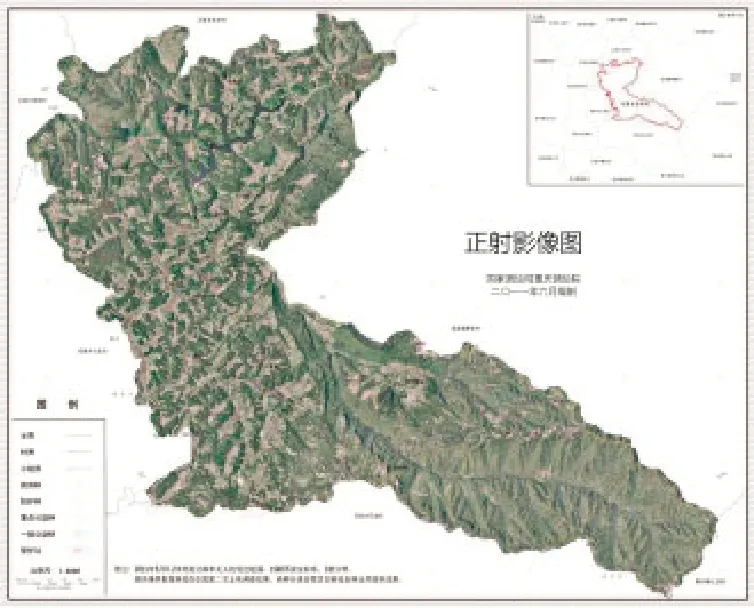
图5 正射影像总图
平面位置中误差:共检查838点,中误差为1.28 m(限差为1.6 m),最大误差为3.74 m。其中,小于等于1倍中误差的点有738个,占检测点数的88%;大于1倍中误差小于等于2倍中误差的点有92个,占检测点数的11%;大于2倍中误差的点有8个,占检测点数的1%(如图6所示)。
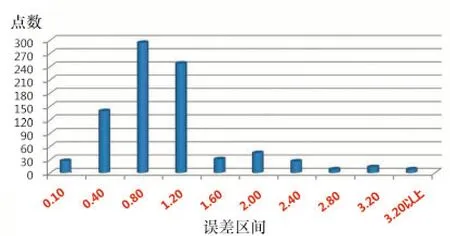
图6 平面位置中误差分布区间图
高程中误差:共检查579点,中误差为0.99 m(限差为1.2 m),最大误差为2.93 m。其中,小于等于1倍中误差的点有464个,占检测点数的80%;大于1倍中误差小于等于2倍中误差的点有98个,占检测点数的17%;大于2倍中误差的点有17个,占检测点数的3%(如图7所示)。
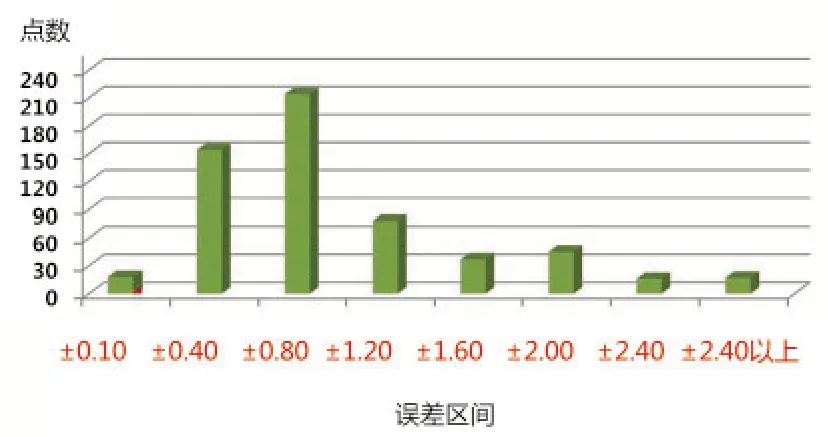
图7 高程中误差分布区间图
对比数据分析,平面中误差及高程中误差都满足GB/T 15967—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量数字化测图规范》要求。由于航测成图误差分布具有区域性,个别地物点出现的较大误差原因可能为:①实测地物点时仪器没有精确安放到地物点上;②立体测图时未量测切准该地物点中心位置。
2 发展趋势分析
对于森林植被茂密、山高坡陡、交通不便、起降条件差、云层低等常规航空摄影较为困难的地区,低空无人机航摄系统的应用可优质、高效地获取高精度航空影像,大幅度提高测绘应急保障服务能力。同时在旅游景区规划设计过程中,业主单位不仅需要DLG和DOM,更需要涉及土地管理部门的土地利用总体规划图与土地利用现状图,涉及林业管理部门的公益林、商品林、经济林等林斑分布信息及水利管理部门的水资源分布等基础地理信息。通过本次低空无人机航摄系统的实地应用证明,它不仅可以满足上述综合基础信息的获取与收集的要求,而且便于相关部门对区域内进行核查、纠错、变更、决策和管理,极大地提高了测绘成果的现势性和通用性,为后期的三维景观模型与三维地表模型等三维可视化数据的制作,旅游景区项目的可开发利用、可行性研究、空间布局规划、产品开发、形象策划、营销管理提供全方位的测绘保障。
目前无人机航摄系统是以普通数码相机为传感器,在数据采集作业时,受光照、雨雪、云雾等天气的影响较大,可对相机系统进行优化,改进机体框架设计,增强起落架的牢固度。由于大多数民用无人机航摄系统巡航时间较短,监控距离较短,在山区及森林覆盖率较大的地区很难找到合适的起降场地,对无人机航摄系统的应用和推广带来很大的不便,可增大飞行控制系统的监控距离和范围,进一步优化完善无人机航摄系统的航线设计、飞行质量检查、像控点布设、空三加密、内业成图等作业方法和质量控制。
3 结 语
经业主单位使用后反馈表明,本次成果能满足项目可研选址、规划设计、要素分析等要求,能直观真实地反映项目区内各种地形地貌要素的布局特点和分布情况。本次应用探索了无人机航摄系统在大比例尺地形图测绘中的生产工艺流程,精度技术指标,成本分析控制,作业效率等方面的问题,为无人机航摄系统的应用推广与优化提供科学依据。如何在后期的开发利用中把林业管理部门的林斑分布信息和土地管理部门的土地利用现状信息等要素进行叠加与融合,做到有效结合、协调统一;如何更好地利用空间信息来为管理部门辅助决策提供数据来源的多样性和一体化服务,是我们今后努力的方向。
[1]刘鹏,彭艳鹏,邹秀琼,等.我国无人机航摄系统现状和前景[J].地理空间信息,2010,8(4):4-6
[2]林宗坚,苏国中,支晓栋.无人机双拼相机低空航测系统[J].地理空间信息,2010,8(4):1-3
[3]闵天,彭艳鹏,周长雯,等.航测用无人机实战操作技巧[J].地理空间信息,2010,8(4):7-9
[4]赵礼剑,程新文,李英成,等.机载LIDAR点云高程数据精度检核及误差来源分析[J].地理空间信息,2009,7(1):58-60[5]韩文权,任幼蓉,赵少华.无人机遥感在应对地质灾害中的主要应用[J].地理空间信息,2011,9(5):6-8
[6]舒金扬.武隆鸡尾山堰塞湖水文应急处置及思考[J].中国水利,2009(19):55-57
[7]李磊,熊涛,胡湘阳,等.浅论无人机应用领域及前景[J].地理空间信息,2010,8(5):7-9
[8]李德仁.王树根.周月琴.摄影测量与遥感概论[M].北京:测绘出版社,2008
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
当代陕西(2020年23期)2021-01-07
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
系统工程与电子技术(2016年7期)2016-08-21
安徽地质(2016年4期)2016-02-27
湖北社会科学(2015年2期)2015-12-25
遥感信息(2015年3期)2015-12-13
电测与仪表(2015年22期)2015-04-09
全球定位系统(2015年4期)2015-02-28
河南科技(2015年2期)2015-02-27
