一种PMSM无位置传感器FOC控制的滑模观测器设计
2013-01-26 09:59杨宇澄徐庆
家电科技 2013年5期
杨宇澄 徐庆
(合肥荣事达三洋电器股份有限责任公司 安徽合肥 230088)
1 引言
随着电子技术的发展以及国家对家电节能要求越来越严格,变频技术在家电上的应用越来越广泛,如变频洗衣机、变频空调、变频冰箱等。各大家电制造商均在研究和优化变频控制方案,而合肥三洋作为国内最早推出变频洗衣机的企业,对变频电机在洗衣机上的应用有着深入的研究。
洗衣机在洗涤过程中的负载始终处于动态变化中,并随着实际的洗涤量和选定的洗涤模式的不同而变化,尤其对于前开式滚筒洗衣机,当负载位于滚筒的顶部时,必须克服重力对电机负载做功。在这种情况下,能够迅速处理动态负载变化的磁场定向控制(Field Oriented Control,FOC)脱颖而出,成为满足这些环境需求的主要方法。
基于无传感器FOC的PMSM控制,在家用电器上的应用有着无可比拟的成本优势。无传感器FOC 技术也克服了在某些应用上的限制,即由于电机被淹或其线束放置位置的限制等问题,而无法部署位置或速度传感器。由于PMSM使用了由转子上的永磁体所产生的恒定转子磁场,因此它尤其适用于电器产品。此外,其定子磁场是由正弦分布的绕组产生的,与感应电机相比,PMSM在其尺寸上具有无可比拟的优势。由于使用了无刷技术这种电机的电噪音也比直流电机小。
作为无位置传感器FOC控制算法的核心,速度与转子位置估算器设计的好坏直接决定了调速系统的精度以及动态响应速度。现在常用速度与转子位置估算器的设计主要有以下几种:自适应观测器法,直接或者间接从电机反电动势中提取位置信息,但是此种方式计算量大,对电机参数依赖性强,此外在电机低速时转速位置估算困难,目前只适用于中高速场合;扩展的卡曼滤波观测器法(EFK),由于系统的噪声未知,其滤波观测器参数不易调整,而且该算法计算量也比较大,不太适用于对成本敏感的实时控制系统应用;高频信号注入法,采用高频信号注人技术的电机转子位置自检测方法依赖外加的高频激励,与转速无关,能够解决低速甚至零速下转子位置的估计问题,但这种方法对信号检测精度要求较高,且需要设计多个滤波器,实现起来比较复杂。在分析PMSM的数学模型和矢量控制方案的基础上,本文提出建立基于新型滑模观测器算法的无位置传感器矢量控制调速系统。
2 PMSM矢量控制模型
从电机理论角度分析,矢量变换控制技术利用坐标系变换,将三相系统等效为两相系统,再将两相系统按照磁场定向等效为两相同步旋转系统,实现对定子电流励磁分量与转矩分量之间的解耦,从而达到分别控制电机的磁链和转矩的目的。所涉及的理论基础主要有两个方面:一是坐标变换理论;二是不同坐标系下电机的数学模型。
2.1 坐标变换理论
矢量控制中主要涉及到的坐标系变换有静止三相—静止两相,静止两相—旋转两相的变换及其对应的逆变换。抽象成坐标系之间的关系可表示为从静止的a-b-c坐标系向静止的α-β坐标系变换,以及从静止的α-β坐标系向同步速旋转的d-q坐标系变换。又由于电机为三相对称接法,三相之间有彼此确定的的关系,即:

这样可以得出实用的变换关系
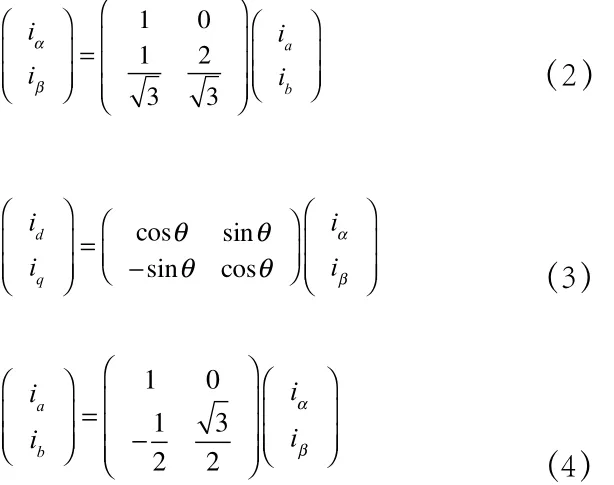

式(2)、(3)为Clarke、Park变换,式(4)、(5)为其对应的逆变换。
式中:iα、iβ为α-β坐标系中的电流;id、iq为d-q坐标系中的电流;θ为同步旋转角速度。
2.2 PMSM数学模型
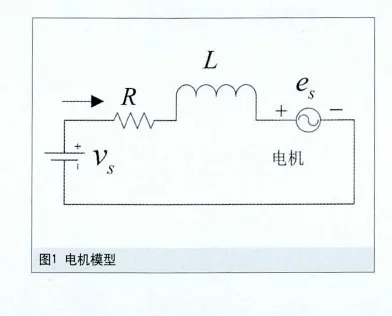
如图1示,PMSM电机在α-β定子静止坐标系下的数学模型为:
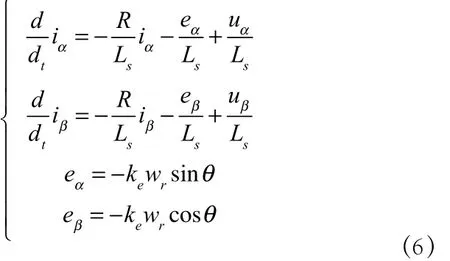
式中:iα、iβ、uα、uβ分别为α-β坐标系下α轴、β轴电流以及电压;eα、eβ分为α-β坐标系下α轴、β轴的反电动势;Ls为定子的相电感;R为定子的相电阻;ke为反电动势系数;ωr为电机转子速度。
通过公式6中反电动势的模型我们可以得知,PMSM的转子位置只与反电动势的相位有关,而其幅值与电机的转速成正比。反电动势信息里面包含了电机的转速以及位置信息,本文就电机转速以及位置信息的提取作重点探讨。
3 滑模观测器设计
3.1 无位置传感器矢量控制框图
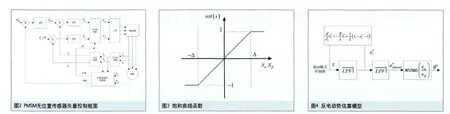
PMSM无位置传感器矢量控制系统基本框图如图2所示。
首先测量三相定子电流ia、ib的值,经由Clarke变换得到α-β坐标系下的iα、iβ,再由Park变换得到在两相同步旋转d-q坐标系下id、iq,对id、iq的值分别进行PID调节输出Vd、Vq,通过速度和位置估算器估算出新的角度以及当前速度值,通过新的角度可将PID调节器输出的Vd、Vq值经由Park逆变换、Clarke逆变换得到Va、Vb、Vc,由新的三相电压值计算PWM占空比,以生成期望得到的电压矢量。
3.2 滑模观测器构建
3.2.1 数字化电机模型
为了能够准确实现位置和速度估算,首先需要对电机模型进行数字化分析。由公式(6)可知PMSM电机在α-β定子静止坐标系下的数学模型为:

式中:is=(i,i)T,其分量分别为定子α轴和β轴的电流;us=(u,u)T,其分量分别为定子α轴和β轴的电流;es=(e,e)T,其分量分别为定子α轴和β轴的反电动势。
公式(7)在数字域中,该方程式表示为:

求解is:

式中:
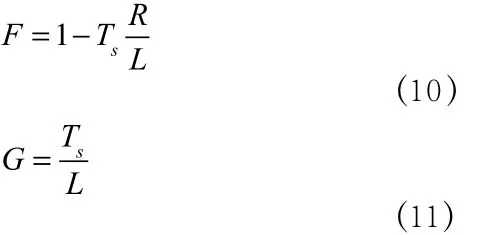
式中:R是电机相电阻,L是电机相电感,Ts是控制周期。
公式(10)和(11)为该电机模型的两个参数,需要修改以针对不同的电机。
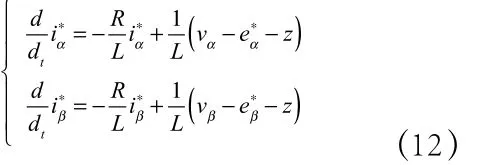
3.2.2 滑模观测器设计
位置和速度估算器是基于电流观测器而构建的,该观测器是电机的一个数字化模型,由公式(7)表征。为了使测量的电流与估算电流相匹配,电流观测器中需要设计滑模观测器予以校正。
判别人类社会文明程度的重要标志之一,就是是否在性别、年龄、种族、地域等方面存在偏见和歧视。公众的态度和反应固然是重要的,而媒体更不应忘记自己应负的责任和道德担当。无论是正规媒体还是自媒体,也无论是传统媒体还是网络平台,都不要为了流量和阅读量,有意臆造一些与实际不符且有歧视倾向的热点和概念,而读者和公众也应该多一些理性、客观的判断和认知。
根据滑模变结构控制理论,设计了一个新型基于饱和函数的滑模观测器:
从图3的饱和函数曲线可知,这种控制率有两个切换面(S=△,S=-△),在边界层内是S的线性函数,在原滑动面S=0上是连续函数,是一种具有三个结构的变结构系统,定义如公式(14):
式中:kslide为滑模系数,且大于0。
滑模控制器用来对数字化电机模型进行补偿,其输出就是校正因子(z)。该增益被加到数字模型的电压项,在每个控制周期都执行该过程直至估算电流()与实测电流()的差值为零。
3.2.3 位置速度估算
3.2.3.1 一阶数字低通滤波器设计
在传统的低通滤波器设计中,滤波常数的值是适合于整个频率段的固定值,但是滤波常数对整个调速系统的稳定性有非常大的影响。滤波常数选取过小会导致调速系统变慢,甚至使系统不能跟踪给定的转速;滤波常数选取过大会引起调速系统出现振荡。考虑上述因素,在调速过程中,设计滤波常数可随转速变化。公式(15)给出了一阶低通滤波器的设计。
式中:kslf为滤波常数,fpwm为计算数字滤波器时的PWM频率,fc为滤波器的截止频率。
滤波器的截止频率设置为电机的电气转速,随着转速的变化滤波器的截止频率的值也在不断变化。
3.2.3.2 位置和速度估算
估算出反电动势后,转子当前位置角度可以用公式(17)来计算。

这里我们应该注意到,反电动势估算是通过低通滤波器来获得,这样就引入了一个相位延迟。在传统的低通滤波器的设计中,低通滤波器的截止频率是一个固定值,基于低通滤波器的相位响应需要做一个相位延迟表,可以通过查表法求的当前转速下对应的相位延迟,相位延迟可以通过公式(18)求得。

在进行相位补偿时,相位延迟表需要存储大容量的相位值,这在一定程度上限制了其在实际中的应用。
本文设计了的低通滤波器的截止频率是跟随转速的变化而变化的,其截止频率为:

式中:M是一个常数。
这样低通滤波器所引入的相位延迟就是一个固定值,可以用于对所有速度范围内进行补偿。由公式(16)和公式(19)可知,低通滤波器的截止频率是随转速变化的,转子角度的相位延迟则是一个与常数M相关的固定值。
对当前转子相位角(θ*)进行补偿之后,通过 次采样得到的每两个相邻θ*值的差进行累加,即可得到当前电机转速。转速计算如公式(20)所示。
这样我们就可以通过采样所得到的相电流(ia、ib),经由速度和位置估算器估算出当前的电机转子位置角度(θ)和电机当前转速(ω),再由图2所示的PMSM无位置传感器矢量控制框图,完成PMSM电机的无位置传感器矢量控制。
4 结论
随着国家对家用电器行业节能要求日趋严格以及新一轮的节能补贴政策的出台,具有明显节能优势的变频技术必将会得到越来越广泛的应用。本文提出了一种基于滑模观测器以及自适应滤波器的PMSM无位置传感器矢量控制算法,所设计的自适应滤波器截止频率随转子转速变化,简化了调速系统的硬件结构,同时达到更好的滤波效果。
[1] 秦峰,贺益康,贾洪平.基于转子位置自检测复合方法的永磁同步电机无传感器运行研究[J].中国电机工程学报,2007,27(3):13-17
[2] 林平,胡长生,李明峰.基于模型参考自适应系统算法的速度估算核的研制.中国机电工程学报[J],2004,24(1):118-123
[3] 祝晓辉,李颖晖,陈亚滨.基于非线性状态观测器的永磁同步电机无位置传感器矢量控制[J]. 电工技术学报,2010,25( 1) : 50 -57
[4] 王成元,夏加宽,杨俊友,孙宜标.电机现代控制技术.北京:机械工业出版社,2006
猜你喜欢
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
机电信息(2018年6期)2018-03-05
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年11期)2014-04-04
电子测试(2013年19期)2013-09-13
电气传动(2012年5期)2012-09-22