
功率方向元件的MATLAB仿真
2013-01-18 12:04刘海洋刘维亭
电子设计工程 2013年2期
刘海洋,刘维亭
(江苏科技大学 江苏 镇江 212003)
近年来随着舰船综合电力推进系统(IPS)[1]的不断发展,从“系统电力集成”的角度研究把全船的能源进行统一管理、综合利用、有效分配[2]。它通过引入先进的环形区域配电概念来降低舰船电力系统建造成本,提高舰船电力系统的可靠性、生命力。
1 问题的提出
目前,传统的配电网络采用三段式过电流保护(电流速断保护、限时电流速断保护、过电流保护)来确保配电网络的保护性,但是随着环形配电网络[3]的引入,传统意义上的三段式过电流保护已经无法满足四性中的选择性。如图1,图2所示。

图1 k1点短路故障Fig.1 Short-circuit fault at k1
对于电流速断保护:
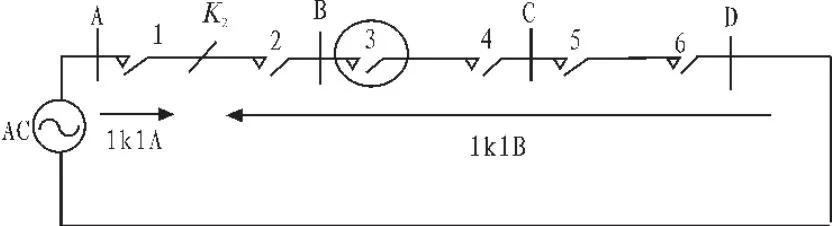
图2 k2点短路故障Fig.2 short-circuit fault at k2
对于过电流保护:
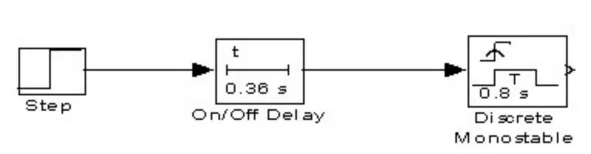
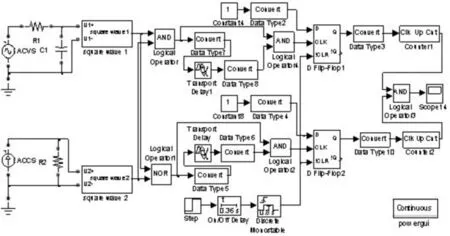
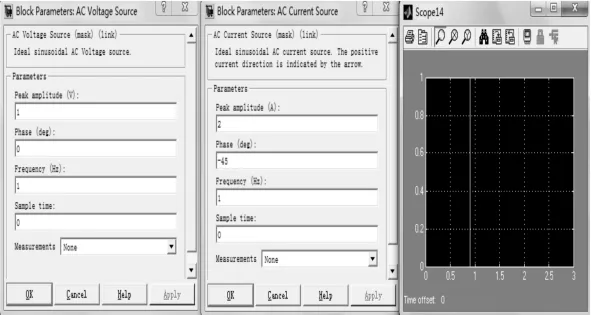
k1点短路时,若t2 为了使得保护2和3不发生误动,需要同时满足t2 因此,引入了方向性过电流保护[4]这个概念。何为方向性过电流保护?简单来说,就是指在原有的过电流保护基础上增加功率方向元件,规定当功率为正方向时保护动作;而当功率为反方向时保护闭锁不动作。 方向性过电流保护=传统的过电流保护+功率方向元件,其中,功率方向元件是这种新型过电流保护的核心,目前,有0°和90°两种接线方式,下面以A相功率方向继电器0°接线方式为例,如图3所示。 图3 A相功率方向继电器0°接线图Fig.3 A phase directional power relay with 0°wiring 图中的方框表示功率方向元件,为了方便计算,这里假定相量 U r超前相量 I r60°。 则有:=,=IA;φr=arctan k1 点短路故障时:φrA=φk=60°;k2 点短路故障时:φrA=180°+φk=240°。 从功率角度来看: 当 UrIrcos(φr-φκ)>0 时,认为故障发生在正方向,功率方向元件动作; 当 UrIrcos(φr-φκ)<0 时,认为故障发生在反方向,功率方向元件不动作。 为了在正方向短路情况下使元件动作最灵敏,A相功率方向元件应接成最大灵敏角φsen。即当k1点发生短路故障时,动作输出量UκIrcosφ应该最大。所以当正方向(点k1)短路故障时,应满足公式(1): 这里φr=φk=φsen,其中φk指的是线路的阻抗角,通常来讲,线路的阻抗角就是该线路的最大灵敏角。由此,可以确定φ的范围,如公式(2)所示: 虽然0°接线方式存在较多的电压死区,在应用方面不如90°接线方式,但它们的原理都是一样的。下面的仿真部分以90°接线方式为计算环境。 功率方向判别元件主要由信号形成,信号移相,滤波,信号转化,方向判别,输出这6大部分组成,其具体构成框图如图4所示。 图4 功率方向元件结构图Fig.4 Block diagram of power directional element 这里,着重介绍移相和方向判别2个部分。 移相: 选用简单的RC电路来进行移相,后面接一个Gain模块对信号进行放大。注意,在α一定的情况下,R、C参数随着电压信号频率的改变而改变,其关系如公式(3): 方向判别: 该部分是方向功率元件最关键的部分,故名思意,它所要实现的功能就是判断电压信号和电流信号是否同方向。若输出为1,则说明电路中的电压电流同方向,方向功率元件动作;若输出为0,则说明电路中的电压电流反方向,方向功率元件不动作。这里,值得我们注意的是,通常电路中因为各种因素的变化,可能会产生短时的电流过高的现象,这些现象都属于正常的,那就要求方向功率元件对此有一个自动识别的功能,不能因为电流一过高就动作,当然,时间再长也不能长过一个周期,否则会误判。为此,我们需要为功率方向元件设定一个时间范围,换句话说,只有在这段设定的时间范围内,功率方向元件才能够动作,这是个大前期,一般我们将这段时间设置为T/4~T。在本次仿真中,搭建了2个模块来实现这个功能,如图5,图6所示。 图5 上限时间(T)的确定Fig.5 Determination of the upper limit time 图6 下限时间(T/4)的确定Fig.6 Determination of the lower limit time 其中,On/Off Delay和Discrete Monostable模块的时间我取 0.36和 0.8而不是 0.4(T/4)和 0.75(T),主要是因为仿真的方波的上升沿是有斜率的,并非标准的方波,需要适当扩大一点时间范围,否则会使其动作条件产生误差。 1)确定移相角的取值[5],依据计算可得表1。 表1 正方向故障时各相方向功率元件的动作条件Tab.1 Operating conditions of direction of the power components of each phase when it is positive direction failure 从表1中可以分析得出: 当 α∈(30°,60°)时,不论电路中的阻抗如何(-90°<φk<90°),功率方向元件均能正确动作,这里取α=45,那么依据计算可知,当电压U的相量角为0°固定时,电流的相量角的范围为(-135°,45°)。 2)搭建仿真模型,如图7所示。 图7 功率方向元件的仿真图Fig.7 Simulation figure of power directional element 3)仿真结果 图8 最灵敏动作条件Fig.8 Most sensitive operating conditions 图9 感抗临界动作条件Fig.9 Inductance critical operating conditions 方向性过电流保护在整个环形区域电力系统[7-8]中起着举足轻重的作用,它动作的正确与否对系统能否稳定运行有重大影响。因此,在电力系统运行中,防止功率方向元件误动作就显得非常重要。通过仿真结果来看,它与理论分析的结果相一致,较好地实现了功率方向的判断,体现了良好的过电流保护的选择性,保证了整个电力系统的安全运行[6]。 图10 容抗临界动作条件Fig.10 Capacitive reactance critical operating conditions [1]罗伟,孙朝晖,方斌.船舶综合电力系统研究的新进展[J].舰船科学技术,2009;31(12):105-108.LUO Wei,SUN Chao-hui,FANG Bin.The new progress in integrated power system research on shipboard [J].Ship Technology,2009,31(12):105-108. [2]韩旗.区域配电网络在舰船电力推进系统中应用与发展[J].船电技术,2011,31(2):33-36.HAN Qi.Application and development of electric distribution network in warship electric propulsion system[J].Ship Technology,2011,31(2):33-36. [3]尚成枝,王德明,朱志宇.舰船环形区域配电结构及可靠性分析[J].船电技术,2009,29(1):37-41.SHANG Cheng-zhi,WANG De-ming,ZHU Zhi-yu.Structure of the marine looped zonal distribution and its reliability analysis[J].Ship Technology,2009,29(1):37-41. [4]刘青.电力系统继电保护原理[EB/OL].(2012-05-31).http://www.docin.com/p-292278842.html#documentinfo. [5]徐振宇.双侧电源网络相间短路的方向性电流保护[EB/OL].(2011-03-28).http://wenku.baidu.com/view/b8ca4171f 242336c1eb95ee1.html. [6]罗佳贤.浅析过电流保护[J].四川建材,2011;37(4):301-304.LUO Jia-xian.Analysis overcurrent protection[J].Sichuan Building Materials,2011,37(4):301-304. [7]陈若珠,黄锦华,骆东松,等.基于ARM的电力系统谐波分析仪的研究与设计[J].工业仪表与自动化装置,2010(4):23-25.CHEN Ruo-zhu,HUANG Jin-hua,LUO Dong-song,et al.The research and design of power system harmonic analyzer based an AEM[J].Industrial Instrumentation&Automation,2010(4):23-25. [8]骆鹤松,骆水莲.电力系统谐波研究综述[J].工业仪表与自动化装置,2011(5):64-67.LUO He-song,LUO Shui-lian.The over view of study on harmonics in electric power system[J].Industrial Instrumentation&Automation,2011(5):64-67.2 方向性过电流保护的理论依据



3 功率方向元件的系统组成及设计



4 MATLAB建模仿真


5 结束语
 猜你喜欢
西部学刊(2022年1期)2022-04-25湖南电力(2021年4期)2021-11-05山东工业技术(2016年15期)2016-12-01广东技术师范大学学报(2016年5期)2016-08-22现代工业经济和信息化(2016年2期)2016-05-17中国老区建设(2016年1期)2016-02-28电子工业专用设备(2015年4期)2015-05-26汽车维修与保养(2015年8期)2015-04-17自动化博览(2014年12期)2014-02-28无机化学学报(2014年3期)2014-02-28
猜你喜欢
西部学刊(2022年1期)2022-04-25湖南电力(2021年4期)2021-11-05山东工业技术(2016年15期)2016-12-01广东技术师范大学学报(2016年5期)2016-08-22现代工业经济和信息化(2016年2期)2016-05-17中国老区建设(2016年1期)2016-02-28电子工业专用设备(2015年4期)2015-05-26汽车维修与保养(2015年8期)2015-04-17自动化博览(2014年12期)2014-02-28无机化学学报(2014年3期)2014-02-28
