
一种基于亮点模型的潜艇目标尺度识别方法
2013-01-16 09:20董仲臣李亚安尚进刘望生
电子设计工程 2013年9期
董仲臣 , 李亚安 , 尚进 , 刘望生
(1.西北工业大学 航海学院,陕西 西安 710072;2.91388部队92分队,广东 湛江 524022;3.浙江理工大学 机械与控制学院,浙江 杭州 310018)
鱼雷攻击[1]的目标常常是具有极大军事和经济价值的大型水面舰和潜艇等,水声对抗技术的出现和发展对鱼雷提出了新的要求。海战中潜艇使用各种类型的对抗器材,对鱼雷的攻击实施干扰和对抗,从而降低了鱼雷攻击目标的概率。这就要求鱼雷的自导系统应综合各种信息,进行多方面的分析,从而能够对潜艇目标和诱饵进行识别,正确地对真实目标进行攻击。水下目标识别是鱼雷反对抗决策的主要依据,是自导技术研究的重要方面。美、英、法、意、俄等国的鱼雷已具有一定的目标识别功能,从而大大提高了作战实力[1-2]。
然而道高一尺,魔高一丈。随着水声对抗技术迅速发展,水声对抗器材可以逼真的模拟目标的各类特征,所以现在鱼雷的反对抗技术越来越不能满足实际的需要。因此,为了能够准确的对真实目标进行攻击,深入研究更加有效的水下目标识别方法是必然趋势。
目标尺度是目标的主要特征之一[3],由于目标尺度较大,反鱼雷技术不易模拟,因此现在的鱼雷通常将尺度识别作为鱼雷反对抗的一种重要手段,如意大利的鱼雷A184、英国的“矛鱼”鱼雷等就是采用了目标识别技术[2-4]。在目标尺度识别过程中,涉及精确估计目标各散射点的方位的问题。文中根据鱼雷对潜艇进行识别的需求,建立潜艇目标的亮点建模,在此基础上采用MUSIC算法,对潜艇的目标亮点进行方位估计,从而实现对潜艇目标的尺度识别。该方法模型物理概念清晰,方位估计算法具有很高的分辨率,能够很好地实现对潜艇目标的尺度识别。
1 潜艇目标亮点模型的建立
1.1 目标亮点模型的理论
理论分析和实验结果表明[5-6],在高频情况下,任何一个目标的回波都是由若干个子回波迭加而成,而每个子回波都可认为是从某个散射点发出的,这个散射点就是亮点。亮点可以是真实存在的,也可以是等效。这样,任何一个目标都可以等效成若干个亮点的组合,每个亮点产生一个回波,所以,目标总的回波是这些亮点回波的迭加。
在目标回波中有3个重要的特征:目标回波的时间展宽、目标回波的亮点起伏和目标回波空间方位分布。这3个特征是对目标进行识别的重要依据,且在实验中已证实了它们的存在。所以,一个完整的目标回波模型可以由幅度因子、时延和相位跳变3个参量确定[5,7]。综上所述,单个亮点的传递函数可以表示为:

其中:r为鱼雷到目标亮点的距离;Ai(r,θ,ψ)为该亮点回波的幅度,它与目标的距离r和声波入射方向,即照射角θ和俯仰角ψ有关;τi表示该亮点的时延,由等效声中心相对于某个参考点的声程决定,且是θ的函数;ω(v)表示由于目标的相对运动,造成回波的中心频率与入射波的中心频率相差一个多普勒频移;φ是回波形成时的相位跳变。
因此,潜艇目标总的传递函数为:

其中:N为目标亮点的个数。
1.2 潜艇亮点模型的建立
潜艇目标回波主要由表面镜反射形成的移动亮点和棱角反射形成的固定亮点组成[8]。无论是移动亮点还是固定亮点,他们都对应于潜艇上的某个部位。根据以上关于潜艇目标亮点的分析,建立潜艇亮点模型:把潜艇等效成3个刚性球,即3个亮点,分别代表潜艇的舰艏、舰桥和舰艉,如图1所示。刚性球不同半径代表不同的目标强度,其中代表舰桥的刚性球半径最大,舰艉其次,舰艏最小。为了使各刚性球能反映潜艇不同部位的目标强度,把代表舰桥的球体直径取为7 m,代表舰艏的球体直径取为5 m,代表舰艉的球体直径取为6 m。
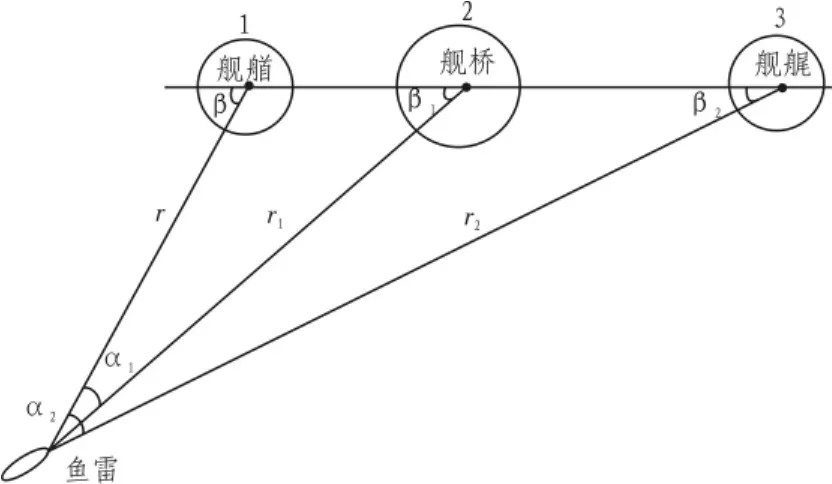
图1 潜艇回波亮点模型Fig.1 Submarine echo highlight model
每个球的反射能力用反射系数b表示,其中,0≤bi≤1,i=1,2,3,反射系数定义为在不考虑声传播损失的情况下,反射波与入射波的声强比,b1、b2和b3分别代表舰艏、舰桥和舰艉的反射系数。假设声波以照射角β和俯仰角ψ入射,由于鱼雷的声脉冲发射周期很短,可认为在一个声脉冲发射周期内鱼雷与潜艇的相对距离不变;而在鱼雷发现目标后,已经将鱼雷定深在潜艇的大致深度上,即俯仰角ψ为0。
设鱼雷发射的窄带脉冲信号为

其中:ω0是载频,p0(t)是包络,它只在脉冲持续时间内有值。
无论目标多么复杂,在远场中散射波都以exp(jkr)/r的规律扩展,k为波数。所以得到的回波为:

其中:ωd为潜艇和鱼雷相对运动产生的多普勒频移。由于鱼雷已经对自身运动产生的多普勒进行了补偿,因此只需考虑潜艇运动产生的多普勒频移:

其中:v为潜艇运动速度,c为水中声速。
1.3 回波时延和相位的计算
假设声波以照射角θ入射时,由于鱼雷的声脉冲发射周期很短,可认为在一个声脉冲发射周期内鱼雷与潜艇的相对距离不变。则第i个亮点的时延为:

其中:r为鱼雷与潜艇距离,即鱼雷与代表舰艏的亮点距离;θ为照射角;li表示亮点与舰艏的距离。
由于入射声波遇到亮点后反射,在回波信号中引入相位跳变φi,它是一个在(0,2π)中均匀分布的随机变量。
2 基于MUSIC算法的目标亮点方位估计
MUSIC 算法(Multiple Signal Classification Algorithm),通常又称多重信号分类方法,是根据接收数据的协方差矩阵,分离出信号子空间和噪声子空间,利用信号方向向量与噪声子空间的正交性,来构成空间扫描谱,实现信号的方位估计。
对于一个由M个阵元组成的已知任意集合形状矩阵,假设有D(D<M)个远场窄带信号(中心频率为 f0),信号源从 D个方向 ΘD=[θ1,θ2,…,θD]入射到该基阵。 这 M 个阵元的接收信号写成矩阵形式为

其中:A(ΘD)=[a(θ1),a(θ2),…,a(θD)]是 M×D 维阵列流行矩阵,s(n)=[s1(n),s2(n),…,sD(n)]是 D×1 维信号源向量,n(n)是 M×1维噪声向量。
数据协方差矩阵可以表示为

其中:Rs和Rn分别为D×D维信号协方差矩阵与M×M维噪声协方差矩阵,即

其中:在空间高斯白噪声背景下,Rn=I,是噪声功率。
对协方差矩阵Rx进行特征分解

其中:Λ是降序排列的特征值构成的对角阵,E=[Es,En]是对应的特征值,Es与En分别是由较大D的个特征值和较小的M-D个特征值对应的特征向量组成的信号子空间和噪声子空间。
阵元域MUSIC方位谱函数为

其中:θ∈Θ,Θ表示观察扇面。
让θ在观察扇面Θ内扫描,计算出式(12)在各扫描方位对应的函数值,该函数出现峰值的方位,即为信号方位估计值,一般有M个峰值。
在图1中,设β为来袭鱼雷对潜艇舰艏亮点的方位角,r为鱼雷与潜艇舰艏的距离,则α1、α2分别为亮点2和亮点3与亮点1的夹角,β1、β2分别为鱼雷与潜艇舰桥和舰艏2个亮点的方位角,r2、r3分别为鱼雷与潜艇舰桥和舰艉亮点的距离。若舰桥和舰艉亮点到舰艏亮点的距离分别用L1和L2表示,则

3个亮点的回波对鱼雷来说相当于3个信号源,根据窄带阵元域MUSIC方位估计原理,对潜艇目标识别的一般步骤为:
1)利用基阵接收数据估计数据协方差矩阵Rx,如式(8)所示;
2)对数据协方差矩阵Rx进行特征值分解,如式(11)所示,同时构造信号子空间Es和噪声子空间En。
3)构造MUSIC方位谱,如式(12)所示,然后通过方位扫描,从方位谱峰值所在位置估计出目标方位,从而实现对潜艇目标的识别。
3 仿真结果及分析
3.1 计算机仿真
假设鱼雷自导系统发出的信号为CW脉冲信号,仿真计算3个亮点的回波信号的方位谱。仿真条件如下:鱼雷发射信号载波频率为30 kHz,采样频率为200 kHz。鱼雷到潜艇的距离为500 m,舰桥和舰艉到舰艏的距离L1和L2分别为75 m和125 m,潜艇速度为5 m/s,声速1 500 m/s。接收基阵为半波长间隔均匀线列阵,阵元个数M=10,信噪比为20 dB。取不同的方位角进行仿真,仿真结果如图2至图6所示。
3.2 结果分析
当鱼雷相对潜艇的照射角取不同值时,仿真产生的潜艇亮点回波的方位谱不同。图2至图5给出了当β∈[0,π/2]时的方位谱,此时鱼雷迎击潜艇。图2是β=0°时的方位谱,此时方位谱函数有一个峰值,无法对3个亮点进行识别;图3和图4分别是β=10°和β=30°时的方位谱,此时方位谱函数有两个峰值,只能对两个亮点进行识别;图5是时β=30°的方位谱,此时方位谱函数有3个峰值,能够对3个亮点进行识别;图6是β=90°时的方位谱,此时鱼雷位于潜艇的正横方向,方位谱函数有3个峰值,识别效果最好。这里只给出了 β∈[0,π/2]时的方位谱,当 β∈[π/2,π]时,情况相似,在这里不再赘述。

图2 β=0°时方位谱Fig.2 Azimuth spectrum of β=0°
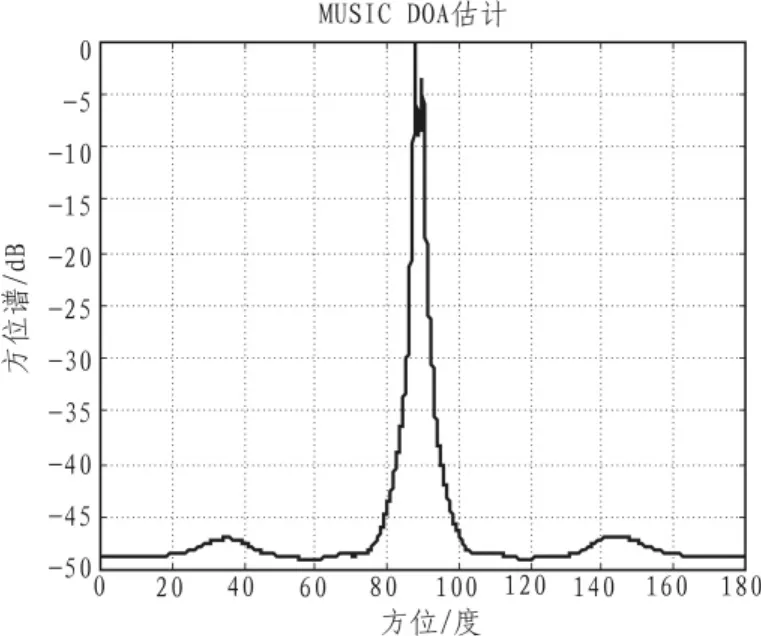
图3 β=10°时方位谱Fig.3 Azimuth spectrum of β=10°
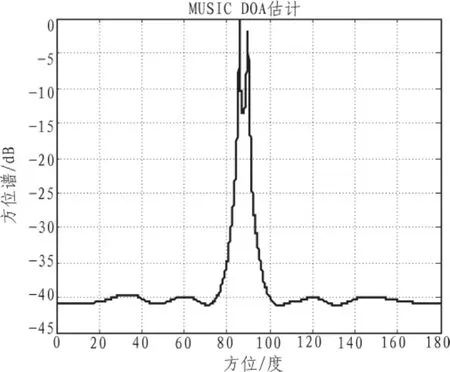
图 4 β=20°时方位谱Fig.4 Azimuth spectrum of β=20°
文中只给出了β取几个典型值时的方位谱,在具体仿真中,β的取值间隔可以无限小。由仿真可以得出,当照射角 θ=[10°,170°]时,可以区分 2 个亮点,能够对潜艇尺度进行识别;当照射角 θ=[30°,150°]时,可以区分 3 个亮点,对潜艇目标的识别达到很好的效果;而在潜艇舰艏和舰艉区即 θ=[0°,10°]和 θ=[170°,0°]时,不能对潜艇进行尺度识别。
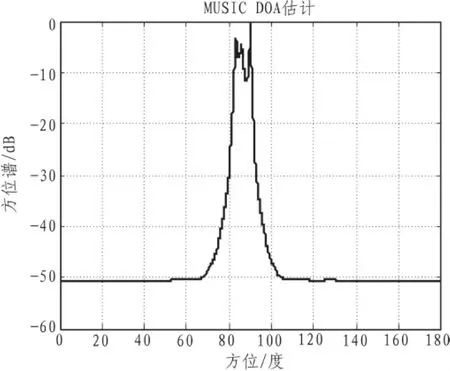
图5 β=30°时方位谱Fig.5 Azimuth spectrum β=30°
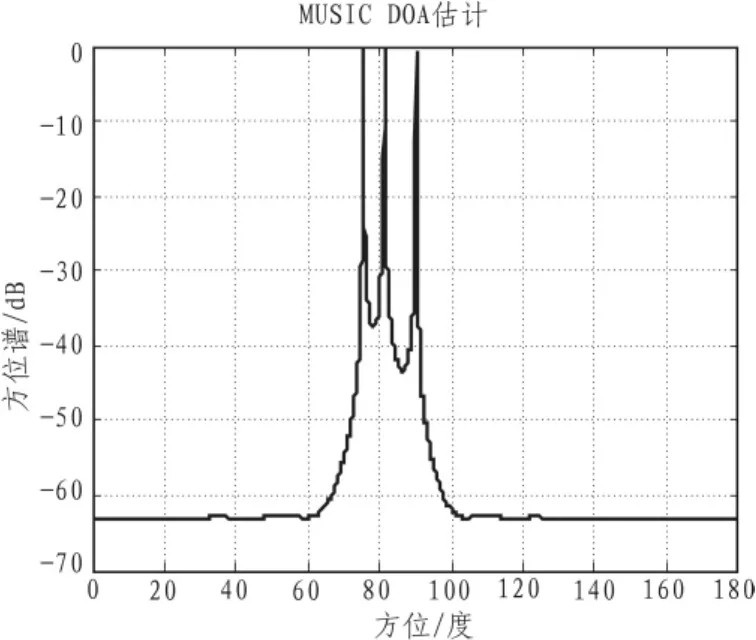
图6 β=90°时方位谱Fig.6 Azimuth spectrum of β=90°
4 结 论
在文中提出的基于亮点模型的潜艇目标识别方法中,通过建立潜艇目标的亮点模型,采用MUSIC算法,对潜艇目标亮点的方位进行精确估计,从对目标尺度进行识别。仿真结果表明,该方法具有很高的分辨率,能够很好地实现对潜艇目标的尺度识别,具有很高的使用价值和现实意义。
[1]董阳泽,刘平香.声自导鱼雷反水声对抗仿真研究[J].系统仿真学报,2008,20(3):767-776.DONG Yang-ze,LIU Ping-xiang.Acoustic homing torpedo acoustic counterwork simulation study of water[J].Journal of System Simulation,2012,20(2):767-776.
[2]刘朝晖,马国强.水下声自导武器目标识别技术综述[J].声学与电子工程,2004,75(3):25-30.LIU Chao-hui,MA Guo-qiang.Underwater homing weapon target identification technology[J].Acoustics and Electronics Engineering,2012,20(2):767-776.
[3]王桂芹,刘海光,贾瑞凤.声制导鱼雷反水声对抗技术综述[J].舰船电子工程,2009,29(3):150-153.WANG Gui-qin,LIU Hai-guang,JIA Rui-feng. Acoustic guidance torpedo anti underwater acoustic countermeasure technology[J].Ship Electronic Engineering,2009,29(3):150-153.
[4]徐枫,严冰,王海陆,等.鱼雷垂直目标亮点高分辨算法仿真与试验研究[J].鱼雷技术,2009,17(6):35-40.XU Feng,YAN Bing,WANG Hai-lu,et al.Torpedo vertical highlights high resolution algorithm simulation and test research[J].Torpedo Technology,2009,17(6):35-40.
[5]汤渭霖.声纳目标回波的亮点模型[J].声学学报,1994,19(2):92-100.TANG Wei-lin.Sonar target echo highlight model[J].Chinese Journal of acoustics,1994,19(2):92-100.
[6]刘伯胜,田宝晶.回声信号时域分析[J].哈尔滨工程大学学报,2002,23(1):86-94.LIU Bo-sheng,TIAN Bao-jing.Echo signal analysis in time domain[J].Journal of Harbin Engi-neering University,2002,23(1):86-94.
[7]王明洲,黄晓文,郝重阳.基于声学亮点特征的水下目标回波模型[J].系统仿真学报,2003,15(1):21-25.WANG Ming-zhou,HUANG Xiao-wen,HAO Chong-yang.Based on the acoustic characteristics of the underwater target echo highlight model[J].Journal of System Simulation,2003,15(1):21-25.
[8]徐瑜,苑秉成,唐波.基于亮点模型的潜艇目标回声过渡特性分析[J].鱼雷技术,2012,20(2):153-156.XU Yu,YUAN Bing-cheng,TANG Bo.Based on the submarine target echo highlight model transition characteristics analysis[J].Torpedo Technology,2012,20(2):153-156.
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
幼儿园(2021年12期)2021-11-06
小哥白尼(军事科学)(2020年8期)2020-05-22
雷达学报(2017年3期)2018-01-19
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
