基于Pro/E振动式油茶果采摘机的运动仿真及分析
2013-01-05 01:25:51李立君高自成
中南林业科技大学学报 2013年11期
叶 霜,李立君,高自成
( 中南林业科技大学 机电工程学院,湖南 长沙 410004)
基于Pro/E振动式油茶果采摘机的运动仿真及分析
叶 霜,李立君,高自成
( 中南林业科技大学 机电工程学院,湖南 长沙 410004)
介绍了油茶果采摘机的现状,以及对一种振动式油茶果采摘机的执行机构进行运动仿真的整个过程。重点介绍了利用Pro/E对各零部件的装配连接及驱动器的添加来构建机构运动学仿真模型,创建并运行运动分析,确定了执行机构运动过程和工作范围,得到了振动采摘头末端一点的运动位置和速度的曲线图,为后续振动式采摘机改进和完善的研制提供了理论依据。
振动式油茶果采摘机;执行机构;实体建模;运动仿真;Pro/E
油茶是植物油重要的优质原料,其收获具有极强的季节性,长期以来,各油茶种植地绝大部分依靠人工采摘油茶果,消耗的人力、时间比较大,采摘效率低,并且某些油茶难以采摘或采摘不到,对人体安全具有一定的威胁。在我国,油茶采摘机的研制刚刚起步,现有技术一直未能解决这个问题,部分用于油茶的采摘机械在采摘过程中,采摘位置不能任意达到,往往会造成漏摘而同样需要人工摘取,影响采摘效率。本振动式油茶果采摘机突出采用多自由度臂架结构,控制振动采摘头夹紧树干,振动以致使成熟的果实脱落,可实现持续的、高效率的、安全的作业。
现今的油茶果种植基地为了适应机械化和自动化管理的需要,果实的栽培已逐渐趋向规范化和标准化。本文取平地株行距3 m×3 m,冠幅直径为3 m的成熟油茶果树作为研究对象,横向和纵向两棵树之间容许设备通过的距离不超过1.5 m,这个距离过车刚刚好,如果在两个树之间停车采摘,则空间太小,采摘臂的转动必定会撞到油茶树,对树造成损伤。于是我们选择将采摘机停在四棵树之间的空间进行采摘,采摘臂活动空间足够大,减少对树的损伤。本文运用Pro/E软件对整机执行机构的作业过程进行了运动仿真与分析。采摘机预期要在四棵树中间位置将振动夹头的位姿达到离采摘机2 100 mm左右树干的采摘距离,以及树干离地500 mm左右的高度完成振动采摘。
1 实体建模
本文考虑到执行机构结构复杂的特点,采用自下而上的方法进行装配[1],即先将各部件单独建模成零件再按照连接、约束关系和运动形式进行装配。在制作模型时,零件之间的装配关系必须正确,否则将不能产生相应的运动,这是能否使用Pro/E仿真的前提和关键。若装配件之间没有相对运动,装配时应该完全约束;不然,就应该根据装配件之间的相对运动,通过连接设定限制运动自由度。在选取预定义的连接集之前,必须了解如何用约束和自由度来定义运动,然后选取相应的连接使机构按照所需的运动方式运动。预定义连接集提供了“刚性”、“销钉”、“滑动杆”、“圆柱”、“平面”等多种连接方式[2]。
旋转支座与机架采用了“对齐”和“配对”约束类型,旋转臂与支座、主臂与旋转臂、从动滑块与摆动座、摆动座与振动滑座、振动滑座与采摘头则一律采用“圆柱”连接和“平面”连接,主臂滑座与从动滑块之间采用两个“平面”连接,液压油缸的活塞与缸之间用“圆柱”连接,约束类型还包括“平移轴”定义活塞面与油缸底面的相对距离。一般情况下,采用的连接形式不同接下来所要定义的约束类型也不同。
完成执行机构所有部件的装配后,进行干涉检查,确认无误后,保存文件。完成装配的执行机构的三维运动学模型如图1所示。
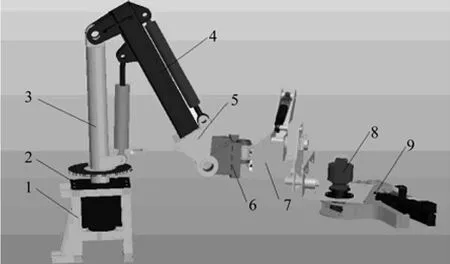
图1 采摘机执行机构Fig.1 Executive mechanism of fruit-picking machine
2 运动仿真与分析
2.1 运动轴设置
运动轴的设置需要定义运动轴的零点、运动轴限制等,运动轴零点即运动轴运动的起点;运动轴限制用来限定运动轴的运动范围[3]。
2.1.1 旋转运动轴设置
本采摘机构有两个旋转轴:根据实际需求,我们将旋转臂的旋转轴设定在180°范围内转动,定义旋转支承装配面与总装配面FRONT面平行时为零点,将旋转角度限定在-90°~90°之间,即采摘臂可以左右偏转90°;振动运动的旋转轴为360°回转,不需要设置。
2.1.2 平移运动轴设置
主臂转动、从动滑块平移、摆动座铅垂平面内转动、振动滑座水平转动和振动采摘头转动均是由液压缸驱动,在这里定义活塞杆底与油缸内孔底平面重合时为零点。这里我们将液压缸的行程依次列成如下表1。
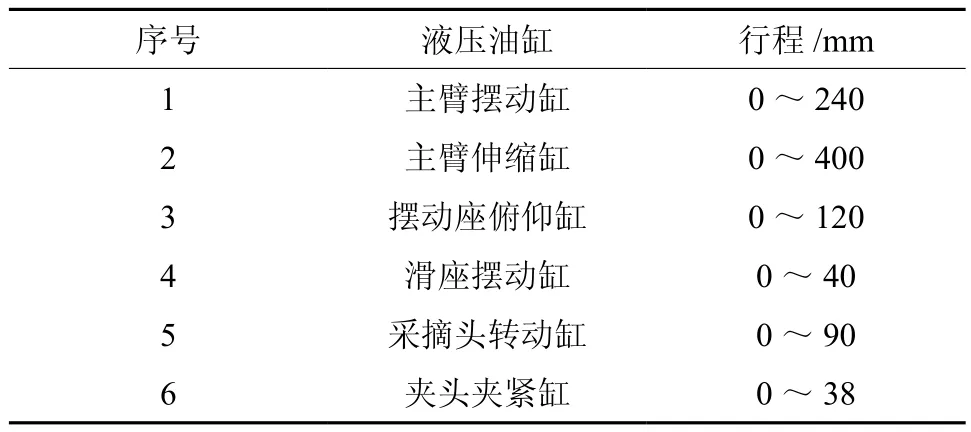
表1 液压油缸行程Table 1 Travel routes of hydraulic oil cylinders
2.2 添加驱动电机
伺服电机用来给机构施加力或力矩,为机构提供指定的运动。本文的振动式采摘臂有两个驱动旋转的伺服电机,一个设在旋转臂上,驱动旋转臂转动,另一个设在振动马达上,驱动夹头振动。其他运动均是由液压缸驱动,六个伺服电机分别设置在主臂驱动油缸,从动滑块驱动油缸,水平摆动座驱动油缸,振动滑座驱动油缸,振动头回转驱动油缸和夹头松紧驱动油缸上,均为移动。由于运动具有往复性,所以在每个运动轴上要定义两个方向相反的伺服电机,本采摘机的执行机构一共需要设置十五个伺服电机。选择活塞杆轴线作为运动轴,然后根据活塞杆的行程和运动时间,在“轮廓”面板的“规范”栏选择“速度”,“模”一栏选择“常数”,输入速度值,表2所示为所设各伺服电机的速度和走完单程所需时间。
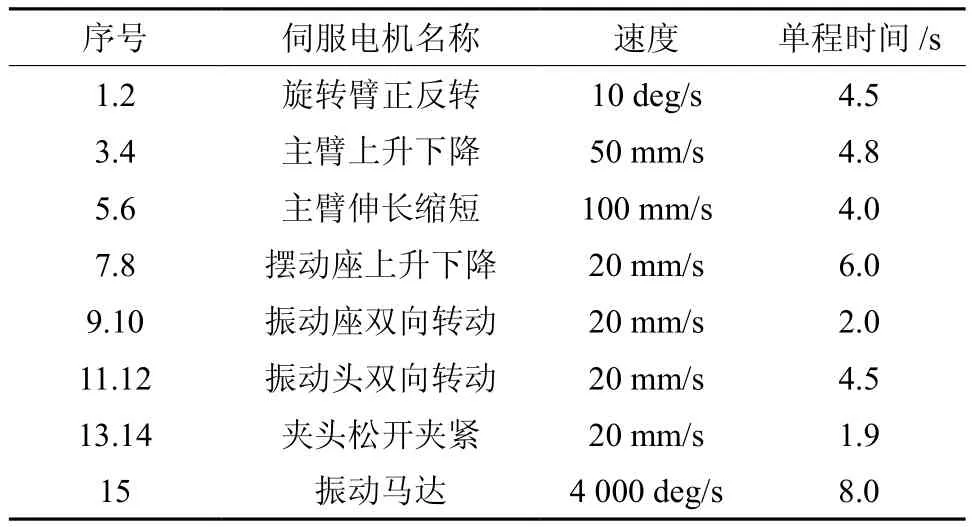
表2 伺服电动机参数Table 2 Parameters of servo motors
2.3 拖动和创建快照
在运动分析之前,单击“拖动”按钮拖动机构,并观察执行机构如何移动,注意连接限制是如何限制拖动运动的。拖动机构至合适的位置,单击鼠标右键接受该位置,创建快照Snapshot1。在之后的运动分析中,可以将此位置定义为机构运动的初始位置。
2.4 创建并运行运动分析
完成伺服电机的设置后,定义机构分析,在“类型”选项卡中选择“运动学”,设置运动时间为“34.5”,帧频设为“20”。然后在点击“电动机”选项,执行机构各部件的运动都是以旋转或者油缸为驱动件,活塞杆在油缸中作往复直线运动,根据各油缸的伸长量来设定各伺服电机的运行时间。本次复合动作仿真,首先是将液压缸拖到最小伸长量为运动分析的初始位置,转动旋转臂与车身呈45°,再是主臂上升至与水平面成45°,同时从动滑块伸出,水平摆动座下降,然后是微调整振动采摘头至合适位置,最后则是松开夹头,对目标树干进行夹持,依靠振动采摘头上的振动马达对树干进行适合频率和振幅的振动,以使成熟的油茶果实脱落。完成单程动作后,收回执行机构至原来的位置。设好各个伺服电机的运转时间与顺序之后,点击“运行”,即可查看机构的运行情况,以便把分析结果存入结果集中[4],如图2所示。
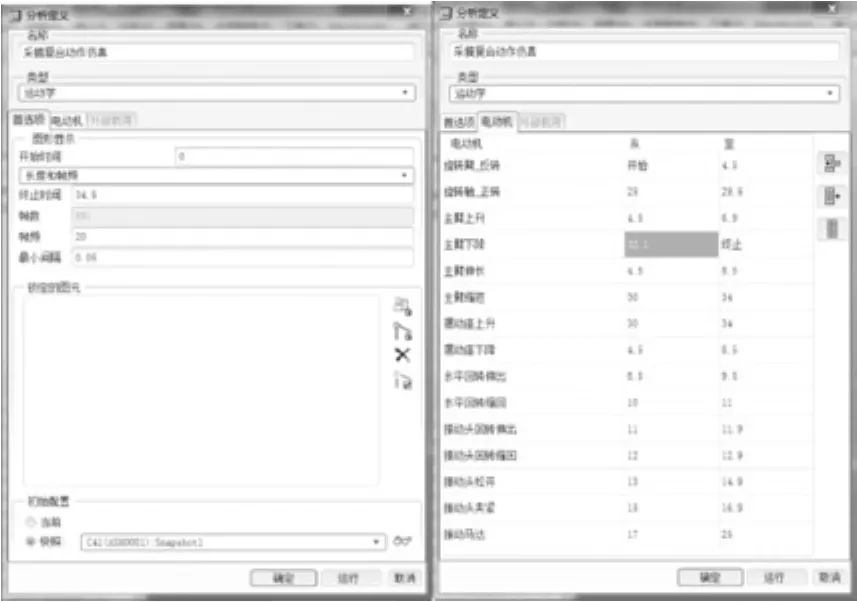
图2 定义机构分析Fig. 2 Definition of mechanism analysis
2.5 查看运动结果分析
在完成运动仿真后,利用保存的运动分析结果集可观察执行机构的运动,对运动机构作碰撞干涉设置,证实各零部件之间没有干涉,并测量主体位置、速度的改变,用图形表示这些测量[5]。
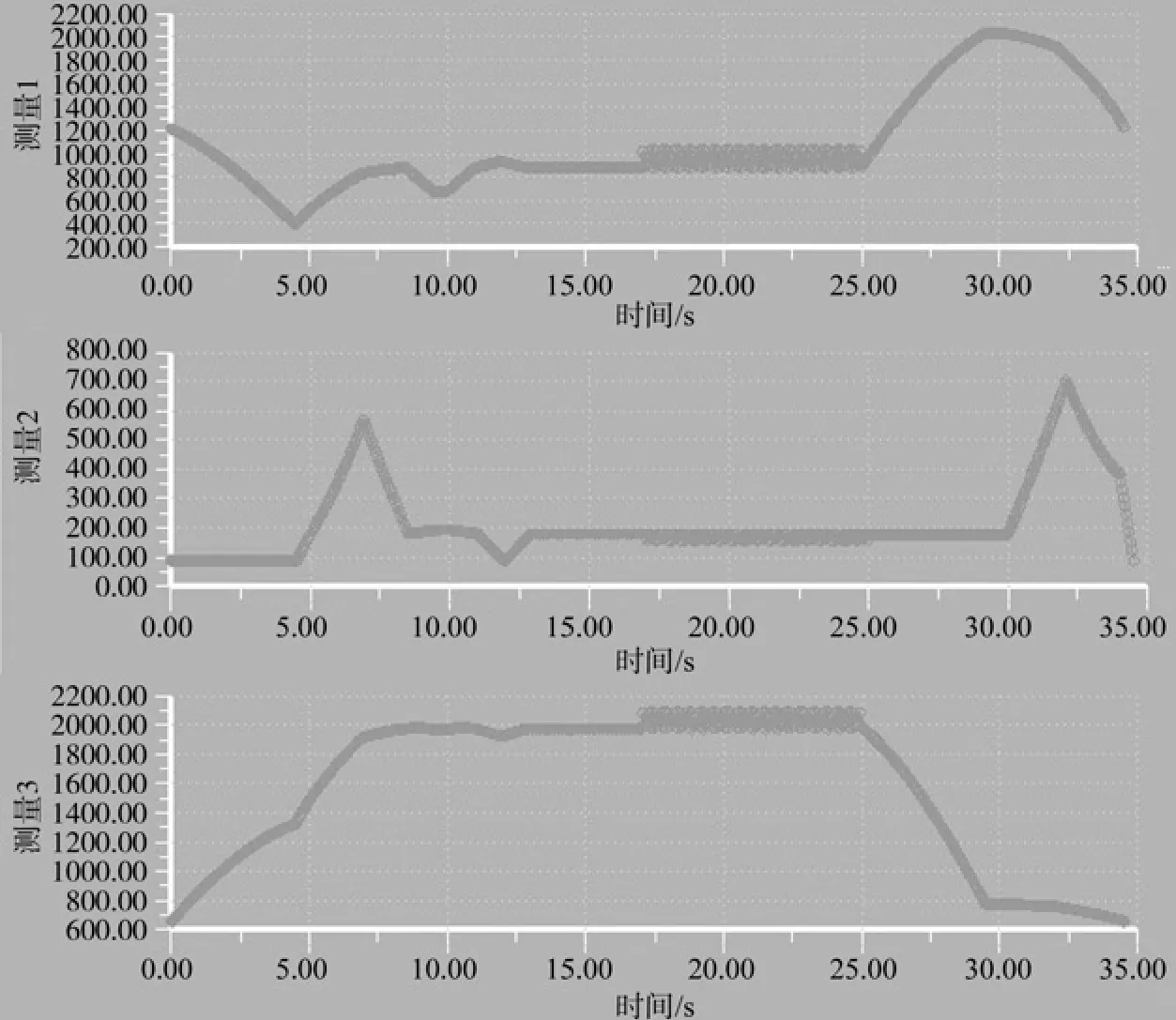
图3 采摘头末端点X,Y,Z轴上位置分量曲线Fig.3 Position component curves of end points on clamp in X, Y, Z axes
从图3中可以看出,0~1 s伸展采摘臂以达到指定的空间位姿;在10~17 s时间内测量点位置很平稳,振动采摘头到达指定树干位置,此时对采摘夹头进行微调整并夹紧树干;17~25 s内采摘臂进行振动采摘;最后则是将执行机构收回至初始位置,操作者可以根据需要,通过改变液压缸的速度和复合动作来改变整个过程时间的长短。图中的曲线图均是以旋转臂底端作为坐标系,离地高度为300 mm,测量点的位置与整个车身呈45度, X,Z方向上的分量分别是1 500 mm,即在XZ平面(水平面)上,车架上的旋转臂座至测量点的距离为2 120 mm,这即是当前姿态下采摘臂所能到达的采摘距离,而Y方向上离地面距离为500 mm,即振动采摘头夹持树干的位置距离地面的高度。这个工位符合实际的采摘距离和采摘头夹持树干的高度。
从图4可以看出,在0~10 s的采摘臂定位阶段,测量点的最大速度为573 mm/s,最小速度为164 mm/s。在0~4.5 s内,速度为一恒定值,这是旋转臂回转时产生的切向速度;在4.5 s~10 s,起初是主臂伸长和摆动座下降两者复合动作,速度为两个动作的合成,然后是顺序动作,速度逐渐减小;在10~17 s内调整夹头位置,夹紧树干;在17~25 s对树干进行振动,以致成熟的果实脱落,这段过程速度变化复杂;在25~34.5 s,采摘臂收回至起始位置。在采摘臂伸出和缩回的时间段,速度大小变化比较频繁,呈阶跃变化,这是由于采摘臂伸缩、转动等动作频繁,动作复合之后比较复杂。本采摘机采用的是液压马达输出轴与滑块偏心连接,采摘头作业时,可根据油茶树刚性的不同,利用改变液压马达转速和偏心距的方法达到调节振动频率和振幅的目的。
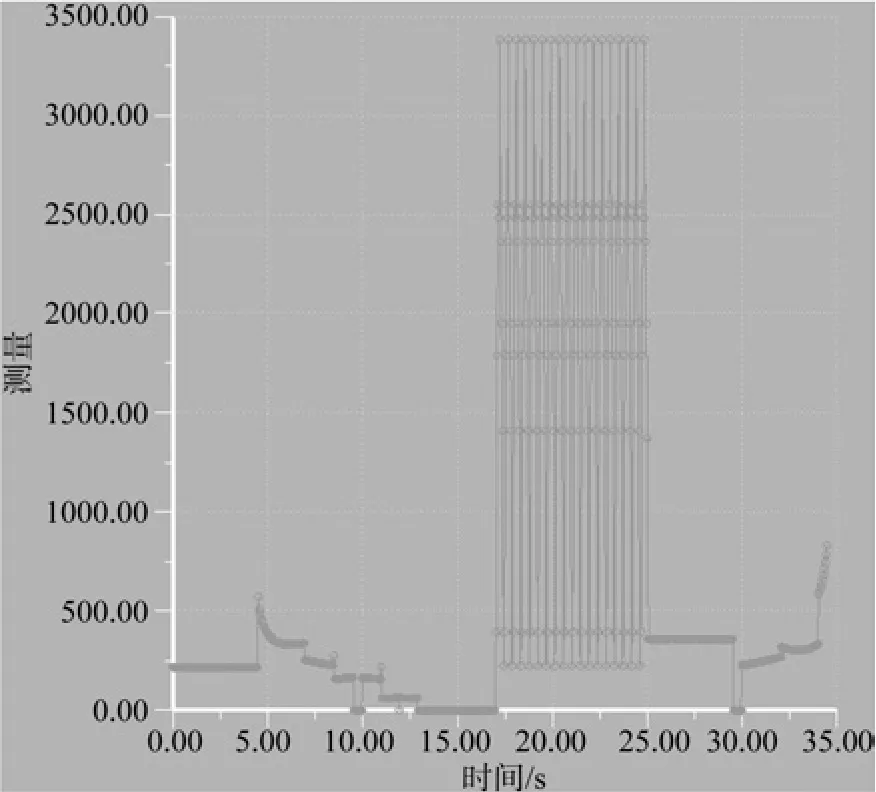
图4 采摘头末端点的速度曲线Fig.4 Velocity and acceleration curves of clamp end point
综合以上仿真的结果与分析可知,仿真结果符合预期设计,对于复合动作的时间设置还能调整得更细致,使得图中的速度曲线更加趋于平缓变化。这论证了本振动式油茶果采摘机的可行性,工作装置之间相互没有干涉,运动轨迹达到预期要求,采摘范围满足实际需求,整机设计在理论上是合理的[6]。
3 结 语
通过以上的采摘机执行机构运动仿真实例,可以看出Pro/E软件不仅实现了采摘机执行机构的三维实体建模和组装,而且提供了完善的运动仿真和运动分析功能[7-8],借助仿真结果对采摘臂运动构件的运动状态、运动规律和运动轨迹等问题进行分析,确定了执行机构的运动过程和工作范围,为振动式油茶果采摘机的进一步研制提供了基础。
[1] 葛正浩,杨芙莲.Pro/E机构设计与运动仿真[M].北京:化学工业出版社,2007.
[2] 雪茗斋电脑教育研究室.Pro/ENGINEER野火版3.0机构仿真运动实例精讲[M].北京:人民邮电出版社,2008.
[3] 刘银辉.油茶果采摘机虚拟样机设计及动力学分析[D].长沙:中南林业科技大学,2012.
[4] 蔡 颂,李立君,高自成.基于Pro/ENGINEER坚果采摘臂的建模及运动仿真分析[J].中南林业科技大学学报,2010,(4):15-18.
[5] 施叶飞.基于Pro/E的机械运动仿真设计[J].中小企业管理与科技,2010,(11):32-33.
[6] 高自成,李立君,刘银辉.油茶果采摘机机械臂的机构设计及运动仿真[J].西北林学院学报,2012,27(2):266-268.
[7] 王 凯,曹西京.基于Pro/E的机械产品机构运动的仿真设计[J].轻工机械,2006,(1):12-15.
[8] 左二兵,李立君,高自成,等.油茶果采摘机工作空间的分析及优化[J].中南林业科技大学学报,2012,32(5):190-194.
Movement simulation and analysis of vibratory camellia fruit-harvesting machine based on Pro/E
YE Shuang, LI Li-jun, GAO Zi-cheng
(School of Mechanical and Electrical Engineering, Central South University of Forestry & Technology, Changsha 410004, Hunan, China)
∶ The recent studying situation of camellia fruit-harvesting machine and the whole simulation process of the executive mechanism of a vibratory camellia fruit-harvesting machine were introduced. The mechanism kinematics simulation model achieved by Pro/E was built through the assembly of parts and the addition of motors, the movement mechanism was created and operated, the movement process and working range of the executive mechanism were determined, the movement position and velocity curve of one point of the end clamp were obtained, all the works provided a theoretical base for the improvement and perfection of the subsequent design.
∶ vibration camellia fruit-picking machine; executive mechanism; solid modeling; movement simulation ; Pro/E
S794.4;S776.033
A
1673-923X(2013)11-0166-04
2013-08-16
国家林业公益性行业科研专项(201104090)
叶 霜(1988-),女,硕士研究生,主要从事现代林业机械化研究;E-mail:ys673686813@126.com
李立君(1964-),女,教授,博士,博士生导师,主要研现代林业技术装备的研究
[本文编校:吴 毅]
猜你喜欢
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
军事文摘(2021年16期)2021-11-05 08:49:16
微特电机(2020年11期)2020-12-30 19:42:32
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
小猕猴学习画刊(2017年1期)2017-02-17 16:04:14
小猕猴学习画刊(2017年1期)2017-02-17 15:57:35
广东第二课堂·小学(2016年11期)2016-12-06 14:29:33
工业设计(2016年6期)2016-04-17 06:42:53