
铁路救援起重机抗倾覆稳定性分析系统模块化设计
2013-01-04 06:09杨明轩
成都工业学院学报 2013年1期
杨明轩,胡 蓉
(1.西南交通大学 电气工程学院,成都 610031;2.成都工业学院 通信工程系,成都 610031)
铁路是国家重要的基础设施之一,铁路运输事故抢险救援工作是确保铁路运输安全、高效的关键保障。近几年的铁路事故救援中,随着对救援效率要求的不断提高,已经有越来越多的铁路救援起重机投入使用。然而,由于设计或操作失误,起重机倾覆事故在国内屡有发生。在我国起重机设计规范(GB3811—2008)中,针对各种流动式起重机,规定了在典型工况下抗倾覆稳定性的计算方法,起重机的稳定性判据为:对于起重机危险倾覆边的稳定力矩和倾覆力矩之和是否大于零。若大于零,则起重机稳定,否则就会有倾覆的危险。虽然目前对于铁路救援起重机抗倾覆稳定性已经有了一套相对成熟的计算校核方法,但由于过程复杂繁琐,且难免会出现疏忽及错误,使得设计效率以及设计的安全性难以得到保障,这给起重机的实际操作带来了极大的隐患,一旦出现倾覆事故,将造成严重的人员伤亡和财产损失。为此,本文设计了一种救援起重机稳定性模块化分析系统,根据用户提供的具体救援工况下的各种物理参数,借助物理引擎仿真软件,通过一系列物理运算,将铁路救援起重机的稳定性分析结果以动画的形式直观地表达出来。
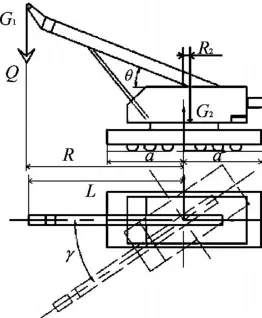
图1 起重机整体受力图
1 铁路救援起重机的抗倾覆稳定性分析原理
目前,国际上一般采用3种方法对起重机抗倾覆稳定性进行校核:力矩法,稳定系数法和按临界倾覆载荷标定额定起重量法。现以力矩法为例,介绍起重机抗倾覆稳定性计算校核的运算原理。
力矩法可以描述为:在最不利的载荷条件下,计算包括起重机自重在内的各项载荷对于起重机危险倾覆边的力矩之和,其中起稳定作用的力矩为正,起倾覆作用的力矩为负[2]。若力矩之和大于零,则起重机稳定。起重机整体受力情况如图1所示,由于起重机吊臂形态对稳定性分析影响较大,故将吊臂和起重机分别计算。由图1可知,由于起重机工作时要向后方伸出配重块,故起重机自身重心要比其物理中心靠后,两者水平距离为R2,起重机自身重力的力矩相对于倾覆边为正,起稳定作用,表达式为G2=(R2+a)。而吊臂重力力矩与起吊物重力在起重机倾覆边之外,故力矩相对于倾覆边为负,起倾覆作用,表达式为-kaG1(R-a)及-kpQ(R-a),其中ka,kp为载荷系数,当起重机处于无风静载状态下时,ka=1,kp=1.25-0.1(Gb/Pq)(其中Gb为起重臂架等效到臂端的重量,Pq为起升载荷)。其力矩法的通式为:

分析计算过程中将铁路起重机各个部件的形态和位置作为考虑因素,各项载荷与力的方向及其影响均要满足实际可能出现的最不利载荷组合的原则。该分析计算方法的假定条件是起重机在无风环境下,坚实、水平的支撑面上或轨道上工作。若起重机工作环境有风力影响或者在倾斜面上工作,应在计算过程中考虑到相应的影响并加以说明。
由此可以看出,由于起重机抗倾覆稳定性分析计算复杂,涉及到多个层面的各种参数,往往会出现计算错误或考虑不周等情况,给救援过程埋下了事故隐患。所以,寻求一种可靠、高效的稳定性计算校核方法,有着非常重要的意义。
近年来,随着虚拟现实技术的不断发展,针对物理仿真运算的物理引擎技术逐渐受到设计人员的重视。物理引擎是一种针对物理现象进行仿真的底层运算模块,可通过对刚性或柔性物体赋予不同的物理属性,根据经典物理学原理,计算并仿真出与实际情况一致的物理行为。物理引擎拥有强大的三维物理运算和显示功能,支持铁路救援起重机这种多刚体系统物理状态的实时分析,为起重机设计者省去了复杂的稳定性算法设计,并能够添加更多的影响因素,从而提高了稳定性分析的效率和精确度。
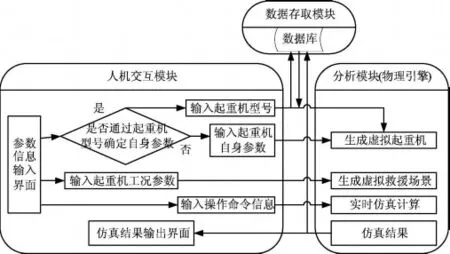
图2 系统结构图
2 系统设计方案
为了保证系统内各部分责任明确,并方便日后的维护和升级,本系统采用模块化设计方法。对系统内各个部分的功能进行分析比较,将彼此相似的功能封装起来,形成一个模块[3]。各个模块之间通过既定接口进行信息传输,系统结构如图2所示。
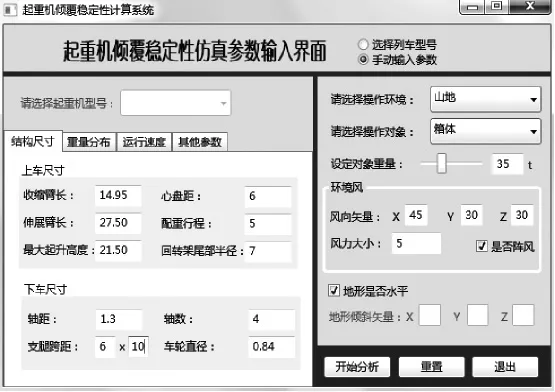
图3 参数输入界面
2.1 人机交互模块
用户通过人机交互模块的“参数信息输入界面”(如图3所示)将起重机自身主要参数,既定救援工况参数以及对起重机的操作命令传给分析模块。
其中起重机自身主要参数为在分析模块中生成虚拟起重机提供依据,可以通过2种方法设定:1)直接在界面中分别输入起重机的自身参数,包括个主要部件尺寸,重量等;2)在界面中输入铁路救援起重机的型号,根据型号在数据库中查找相应起重机的各项参数。前者可以通过自定义参数来验证特殊结构或处于设计中的起重机型号,后者可以根据起重机型号方便地调出对应的各项参数,验证已有型号起重机的稳定性。
另外,还需要根据设计需求为铁路救援起重机假定一种特定的工作环境,包括天气、地形、事故种类等。将既定的工况参数通过界面传给分析模块,据此生成相应的救援场景。
最后,通过界面上的控件模拟对起重机的操作,如吊索升降、车体旋转等。将操作命令发送至分析模块,据此对起重机的物理状态进行运算分析。
2.2 分析模块及关键技术
分析模块基于一种视景仿真软件搭建,预先加载一个自带默认参数的虚拟起重机和虚拟救援场景。通过接收界面传进来的起重机自身参数和工况参数,修改默认值,使之符合分析需求。
分析模块集成了与救援起重机动作形态相关的所有物理因素,包括外观、位置、速度、质量、惯性、加速度、弹性、摩擦以及来自外界的地形、风力等[4],能够非常逼真地模拟出救援起重机在实际操作过程中的各项物理动作,实时计算并定位出起重机的整体重心位置。当救援起重机的物理形态达到倾覆条件时,向用户发出警告并借助以上参数实时进行各个物体间的碰撞检测计算。如果操作人员继续执行错误操作,则起重机发生倾覆事故。分析模块将起重机倾覆事故发生过程的物理形态仿真出来,获得事故结果的真实预演。
如图4所示,该仿真计算流程中的仿真计算环节整合了较为准确高效的物理引擎计算模块,使该模块能够在实时仿真计算的情况下,保证模块输出结果的精确度。同时,由于采用循环回调式仿真流程设计,每一帧的仿真结果都是根据反馈的铰接状态及上一帧的物理参数计算获得,从而使输出结果真实平滑,无跳变突变等异常情况发生,方便下一步生成逼真的仿真视景。
分析模块对起重机实时分析所用到的典型参数和得到的主要结果,将会传给人机交互模块的“仿真结果输出界面”,包括起重机主要部件的物理状态,对起重机稳定性造成影响的环境因素,整车倾覆力矩等,同时将这些信息以三维动画的形式展现出来,使分析结果更加直观,如图5所示。

图5 起重机正常工作和倾覆瞬间对比图
2.3 数据存取模块
数据存取模块存储了一系列常见起重机的自身参数,可以根据起重机型号查找并输出给分析模块。以NS1601型铁路起重机为例,表1列出了数据模块中保存的部分相关参数。
数据存取模块还负责将每次仿真分析的各项数据,包括起重机参数信息,救援环境信息以及对起重机的顺序操作命令以及最终得到的分析结果保存起来,方便以后查验。
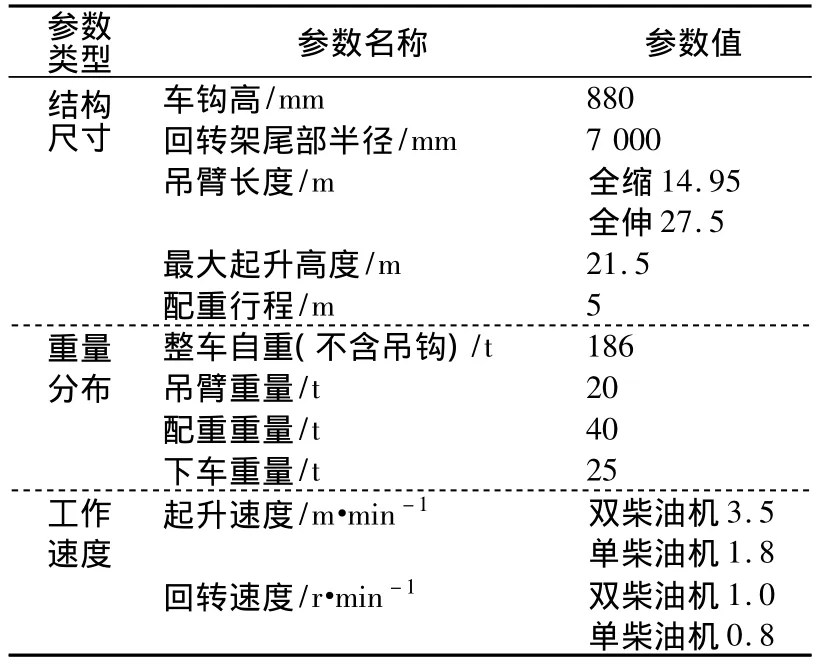
表1 NS1601起重机部分参数
3 结语
本文在分析了现有铁路救援起重机抗倾覆稳定性分析方法局限性的基础上,提出了一种基于物理引擎的模块化设计方法,可以通过自行设定或自选型号2种方式来验证救援起重机的抗倾覆稳定性。通过分析模块的仿真计算,提高了抗倾覆稳定性的分析效率和计算准确性。模块化的设计方式保存了系统内部各个模块的独立性,使该系统具有较强的普适性和移植能力,方便以后的功能扩展。
[1]周奇才,周在磊,李文军,等.2500 t环轨式起重机抗倾覆稳定性分析[J].机械设计与研究,2012(4):108-112.
[2]张质文,虞和谦.起重机设计手册[M].北京:中国铁道出版社,1998.
[3]郑彩虹.软件三层架构的重构与优化技术研究[D].苏州:苏州大学,2010.
[4]杨灿宇,杨永发,王峰,等.铁路救援起重机常见倾覆现象分析[J].科技传播,2010(15):97-98.
[5]刘晓东,曹云飞,刘国荣,等.虚拟作物集成平台及其三维交互处理[J].微电子学与计算机,2004(12):13-15,19.
[6]NVIDIA corporation.NVIDIA PhysX SDK 2.8 documentation [EB/OL].[2012 -12 -20].http://developer.nvidia.com/object/physx.html.
猜你喜欢
哈哈画报(2022年5期)2022-07-11
学生天地(2020年1期)2020-08-25
中国特种设备安全(2018年10期)2018-12-18
石油化工建设(2018年2期)2018-07-11
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
船舶标准化工程师(2015年5期)2015-12-03
数学大王·低年级(2015年6期)2015-07-09
