
抓取机械手的设计——应用于医用药水针剂瓶
2012-12-27 09:38:42朱晓红
河北能源职业技术学院学报 2012年2期
朱晓红
(连云港职业技术学院,江苏连云港 222000)
抓取机械手的设计
——应用于医用药水针剂瓶
朱晓红
(连云港职业技术学院,江苏连云港 222000)
本文设计了一种两自由度的并联机械手实现对医用药水针剂瓶的抓取动作,对这种机械手位置、速度、受力做了分析,最后进行了药水针剂瓶抓取机械手的结构设计。该机械手应该在医用药水针剂瓶以及其它瓶装货物的生产中有广阔的应用前景和实用价值
药水针剂瓶;机械手;结构设计;受力分析
在医用药水针剂瓶的生产过程中,为了提高生产效率,用机器人手作为针剂瓶的分拣设备来代替工人的劳动,这样不仅大大提高劳动生产率,减轻工人的劳动强度,而且还能够提高分拣精度,减小生产错误率。
1.针剂瓶抓取机械手整体设计
该机构采用了P-(4-RRR)机构,如图1所示,(a)为其原理图,(b)为三维实体模型示意图。
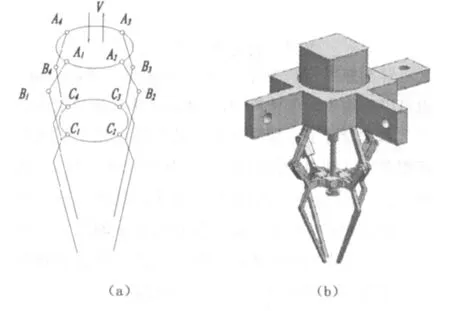
图1 针剂瓶抓取机械手的原理图及其三维实体模型
现取出其中一支A2B2C2分析,简化后如图2所示,设A2B2长l1,初始位置与y轴的夹角为α,B2C2长l2,初始位置与x轴的夹角为β,手指C2D2的长l3,初始位置与x轴的夹角为λ,D1点沿x负方向位移为b-c时,其摆过角度为θ。抓取过程中A2点x坐标不变,y方向负方向的坐标变化量为△y,由几何关系推导得到
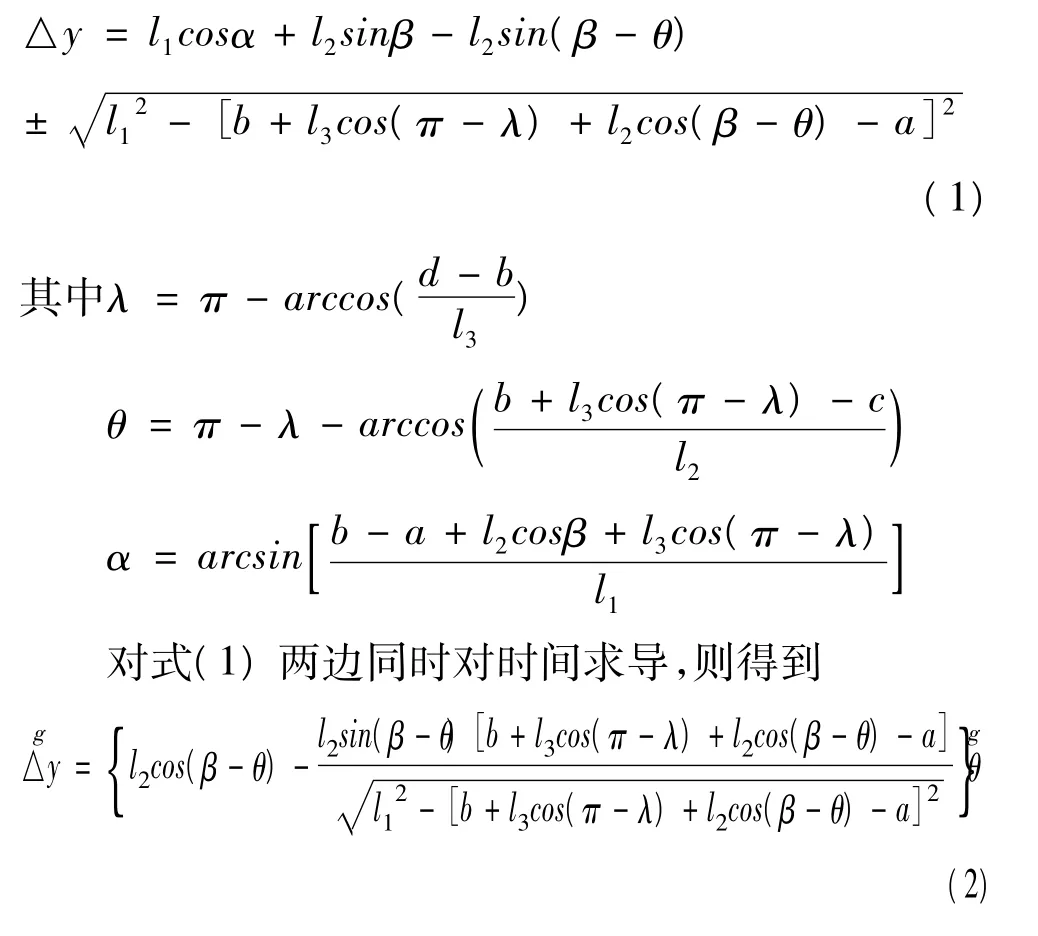
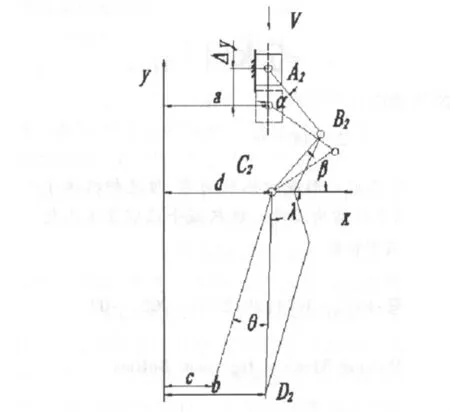
图2 机械手第二分支简图
2.针剂瓶抓取机械手受力分析
手爪的受力分析主要是计算所需夹紧力F1和驱动力F,如图3所示。抓取针剂瓶时所需的力最大,设针剂瓶重为G,手指和针剂瓶的摩擦系数为f,N为B2C2杆沿A2B2方向的力,F1为针剂瓶对C2D2杆的作用力,F2为针剂瓶对C2D2杆的摩擦力,则F2=fF1。以针剂瓶为研究对象,由力平衡原理得到
图3 手爪的受力图

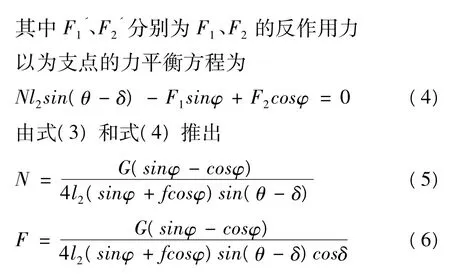
则针剂瓶抓取机械手所需总理论驱动力为4F。
3.针剂瓶抓取机械手的结构设计
在针剂瓶抓取机械手的手指尖部加上椭球体状指尖,在抓取过程中四个椭球体状指尖相切,可以有效地防止在抓取针剂瓶过程中的脱落,如图4所示。在图3中,b表示针剂瓶长度值的1/2,c表示椭球体状指尖的半径,其它参数可根据需要选取。设计中以某针剂瓶为例进行计算,相关参数取为a=15mm,b=15mm,c=8mm,d=20mm,β =75°,λ =70°,l1=30mm,l2=40mm,l3=100mm将上述参数代入式(1)求得
△y=1.35mm
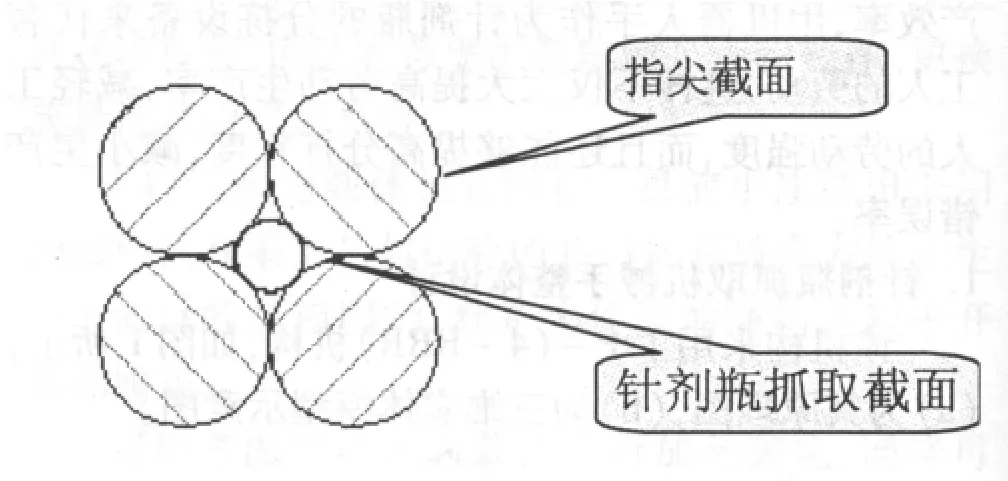
图4 指尖部位截面图
针剂瓶抓取机械手的驱动元件可以选取气缸,也可以选用齿轮齿条机构,具体设计不在这里赘述。
本文设计了一种两自由度的并联机械手实现对医用药水针剂瓶的抓取动作,对这种机械手位置、速度、受力做了分析,最后进行了药水针剂瓶抓取机械手的结构设计,从而完成了抓取机械手的设计。该机械手应该在医用药水针剂瓶以及其它瓶装货物的生产中有广阔的应用前景和实用价值。
Design of a Manipulator for Grasping Applied in Picking Medical Injection Bottles
ZHU Xiao-hong
(Lianyungang Technical College,Lianyungang Jiangsu,222000)
This article designs a two-degree-freedom parallel manipulator to pick medical injection bottles.The location,speed and stress of this manipulator are first designed,and then its structure is designed.The manipulator is intended to apply widely in the manufacture of medical injection bottles and other bottles.
medical injection bottle;manipulator;structure design;stress analysis
TH12 < class="emphasis_bold">文献标识码:A
A
1671-3974(2012)02-0057-02
2012-02-13
朱晓红(1977-),女,硕士,连云港职业技术学院讲师。研究方向:机械设计研究。
猜你喜欢
纺织报告(2022年8期)2022-08-25 08:14:40
数理天地(初中版)(2022年17期)2022-05-30 10:48:04
当代陕西(2022年6期)2022-04-19 12:12:26
今日农业(2020年23期)2020-12-15 03:48:26
今日农业(2020年22期)2020-12-14 16:45:58
学生天地(2020年22期)2020-06-09 03:07:46
现代苏州(2019年16期)2019-09-27 09:30:38
Coco薇(2017年9期)2017-09-07 20:50:46
中国当代医药(2015年8期)2015-03-01 02:01:52
——单针剂C群脑膜炎球菌结合疫苗在婴儿12月龄接种加强剂量疫苗后的免疫原性:开放标签随机对照试验
中国全科医学(2015年15期)2015-01-25 19:57:11
