
GPS/INS支持下的机载干涉SAR定标试验
2012-12-14 01:50彭桂辉谭克龙韩春明刘海君苗小利
测绘工程 2012年6期
梁 菲,彭桂辉,谭克龙,刘 敏,韩春明,刘海君,苗小利
(1.西安煤航信息产业有限公司 技术开发应用分公司,陕西 西安710054;2.中国科学院对地观测与数字地球科学中心,北京100012)
机载合成孔径雷达干涉测量(Synthetic Aperture Radar Interferometric)凭借其不受光照条件影响、高分辨率、可穿透一定地表等独特优势,目前已经发展为最有潜力获取高精度数字高程模型(DEM)的技术手段之一[1]。影响机载干涉SAR生成高精度DEM的2个主要限制条件是:载机飞行的不稳定性和系统参数误差。精确记录载机在飞行过程中的姿态变化,可以在干涉处理中将这种不稳定性进行校正。系统参数误差的影响主要来自干涉系统设备本身存在的相位偏移、基线长度、基线倾角以及载机姿态等参量的测量偏差,这些参数偏差将直接引入DEM误差[2]。通过干涉定标技术对这些参数偏差进行校正,提高获取DEM精度。
干涉定标是根据干涉SAR成像的几何关系建立定标标准和系统参数之间的关系,利用地面定标点对系统参数进行校正,得到高精度DEM。在定标场内根据一定规则布设定标器,GPS凭借高精度定位、提供速度和时间等信息的特点,成为干涉定标试验外业测量的重要工具,以地面定标点为标准,对干涉系统参数进行校正[3]。机载干涉SAR中结合全球定位系统(GPS)和惯性导航系统(INS),GPS提供高精度的定位数据,INS系统提供飞行平台的飞行姿态数据。本文采用基于正侧视模型下的敏感度模型干涉定标方法,对GPS/INS支持下的干涉定标进行仿真试验,验证高精度的GPS定位数据可提高InSAR获取的DEM精度。在正侧视模型下,不考虑载机姿态(偏航角、侧滚角和俯仰角)、斜视角等干涉参数。本文的研究基于INS系统测量的数据精度满足要求。
1 基于敏感度方程的干涉定标
1.1 干涉定标模型
在基于正侧视的模型中,机载干涉SAR几何关系如图1所示。

图1 正侧视模型下机载干涉SAR几何关系
图1中,A1、A2为主辅天线的相位中心位置,基线长度→B为主副天线相位中心的距离向量,r1、r2分别为A1、A2到地面点位置P的距离,θ为主天线参考视角,H为航高,α为基线倾角,h为地面目标点P的地表高程。由图1的几何关系可得目标高程h 为[4]
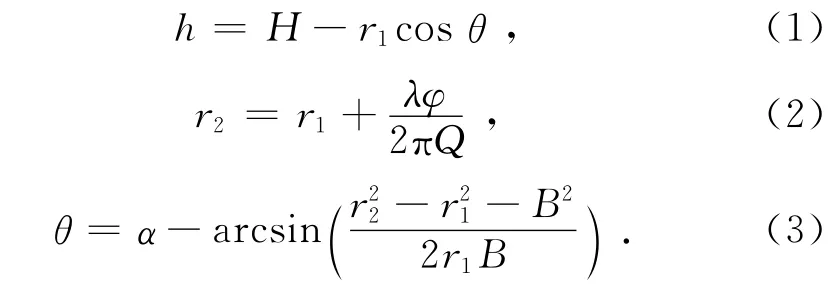
式中:φ为相位偏置,在标准模式下Q=1,乒乓模式下Q=2。
1.2 敏感度矩阵
敏感度矩阵是各个干涉参数对地面目标高程的偏导数。从正侧视成像几何关系中可得,影响目标高程h的主要干涉参数有:斜距r1、相位偏置、基线长度和基线倾角。由于各个干涉参数对目标点高程的敏感度不同,不同的参数组合会造成敏感度矩阵条件数变大,造成矩阵病态,由文献[5]得,基线长度、基线倾角和干涉相位组合时敏感度矩阵条件数最小,本文采用该组合进行试验。
1)干涉相位对地面目标点高程的敏感度[6-7]

2)基线长度对地面目标点高程的敏感度

3)基线倾角对地面目标点高程的敏感度

式(4)~(6)表述了干涉参数对高程的敏感度。应用足够的地面定标点,根据敏感度方程进行干涉参数定标。敏感度矩阵表示为

1.3 干涉定标
高程差和干涉参数偏差的关系表示为

式中:Δ为L×1高程数据误差向量;F为L×N敏感度矩阵,ΔX为N×1待估计的干涉参数偏差向量;L为GCP的数目;N为待定标的参数数目。在干涉定标中,L>N,即由式(8)描述的线性模型是一个超定线性方程组。应用最小二乘法求解干涉参数偏差,基于奇异值分解的基础上求敏感度矩阵F的Moore-Penrose广义逆,给出方程的最小范数最小二乘解,且具有唯一性[8]。
通过式(8)求解得到参数偏差后,更新干涉参数,计算DEM,直到2次计算的DEM的均方差达到理想精度。干涉定标数据处理流程如图2所示。
2 试验与结果分析
本试验以平地作为定标场,采用的InSAR系统平台参数如表1所示;控制点数据如表2所示。
本次试验对各个干涉参数加入误差,基线长度0.05m,基线倾角0.01rad,干涉相位加入统一的偏移量10rad,外业测量的定标点高程加入3种符合正态分布的随机误差,方案1(0,1),方案2(0,0.1),方案3(0,0.05),如表3~5所示。

图2 干涉定标流程

表1 InSAR系统平台参数
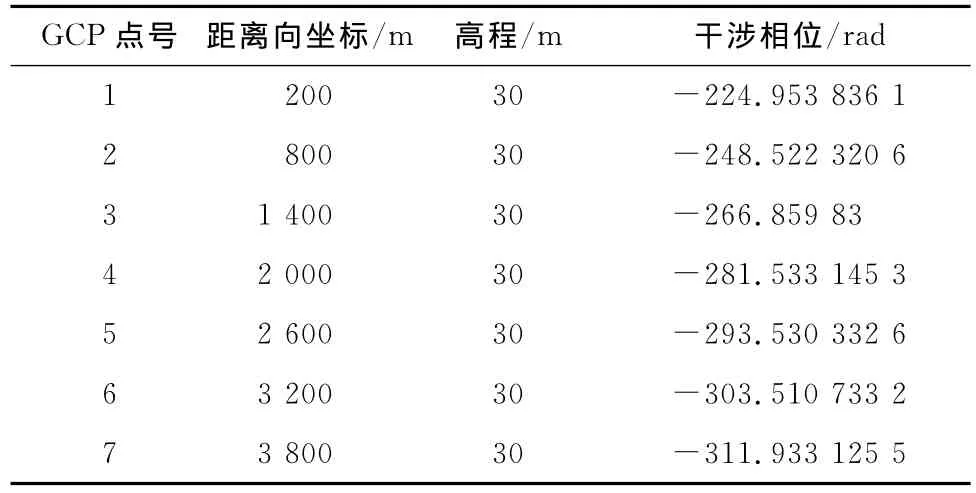
表2 控制点数据

表3 干涉参数偏差定标结果
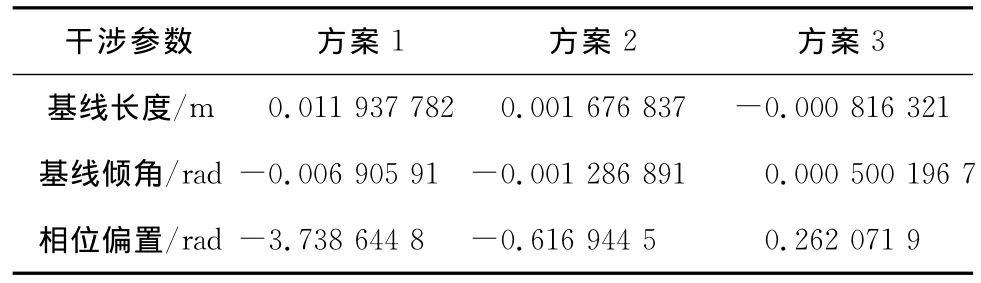
表4 干涉参数定标结果偏差
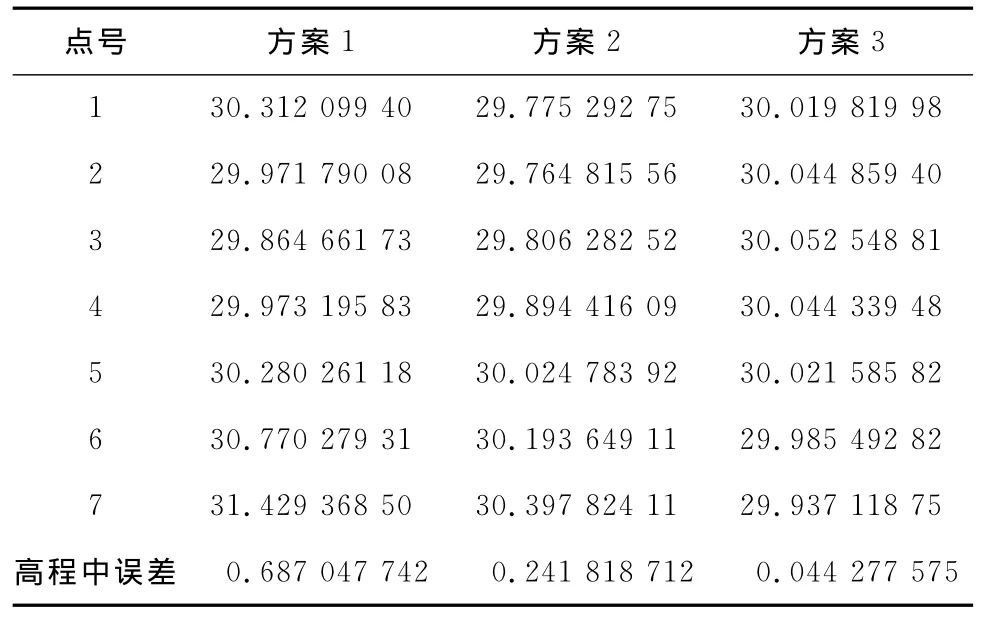
表5 高程数据
由定标结果可以得出,方案3中解算出的干涉参数精度最高,所计算出的DEM精度也最高。①验证了基于敏感度方程的干涉定标方法在干涉定标中的可行性;②干涉参数中微小的误差会引起很大的高程误差;③随着GCP高程误差的降低,干涉定标的精度越高,计算出的DEM精度越高;④GPS测量定标点的定位精度越高,干涉定标精度越高。
3 结 论
本文基于敏感度方程的干涉定标方法,在正侧视的成像模型下,只对地面目标点的高程数据进行定标处理,选择了基线长度、基线倾角、干涉相位的干涉参数组合,进行系统仿真模拟试验。
1)GPS技术结合机载InSAR可获取高精度的DEM数据;
2)高精度的GPS定位数据提高了干涉定标的精度;
3)干涉定标是机载InSAR获取高精度DEM的关键技术;
4)在定标场内合理布设角反射器可提高GPS测量精度,提高获取的DEM精度。
5)本文的研究基于模拟试验数据,在后续的研究中可采用外业试验数据进行验证,并且可进行多参数的定标试验。
[1]E.Rodriguez and J.M.Martin.Theory and design of interferometric synthetic aperture radars[C].IEEE Proceedings-F,1992,139(2):147-159.
[2]Mallorqui J J,Rpsado I,Bara M.Interferometric Calibration for DEM Enhancing and System Characterization in Single Pass SAR Interferometry[C].IEEE,2001:404-406.
[3]王彦平.机载干涉SAR定标模型与算法研究[D].北京:中国科学院电子学研究所,2003.
[4]张薇,向茂生,吴一戎.基于正侧视模型的机载双天线干涉SAR外定标方法[J].遥感技术与应用,2008,23(3):346-350.
[5]张薇,向茂生,吴一戎.矩阵条件数在机载InSAR参数定标中的应用[J].系统仿真学报,2010,22(3):589-591.
[6]Dall J,Grinder-Pedersen J,Madsen S N.Calibration of a High Resolution Airborne 3-D SAR[C].IEEE,1997:1018-1021.
[7]Dall J,Madsen S N,Kerller K,et al.Using Airborne SAR Interferometry to Measure the Elevation of a Greenland Ice Cap[C].IGARSS2000,Hawaii,USA,2000:1125-1127.
[8]张贤达.矩阵分析与应用[M].北京:清华大学出版社,2004:85-95.
猜你喜欢
今日农业(2021年19期)2022-01-12
空间科学学报(2020年1期)2021-01-14
工程与建设(2019年5期)2020-01-19
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
新闻传播(2018年10期)2018-08-16
北京航空航天大学学报(2017年9期)2017-12-18
成都信息工程大学学报(2017年6期)2017-03-16
海外华文教育(2016年2期)2017-01-20
光学精密工程(2016年3期)2016-11-07
