
用于创新类课程的智能循迹小车的设计
2012-12-14 07:39:10黄远长李丹殳国华
电气自动化 2012年4期
黄远长,李丹,殳国华
(上海交通大学 电气工程系,上海 200240)
0 引言
实践教学体系是提高实验教学质量的重要保证,也是培养创新型人才的必要手段之一[1]。我校推出了工程实践与科技创新系列课程,共有4个阶段,成为本科实践教育体系的重要内容,其中的第一阶段又作为面向全校学生的工程实践类的通识教育课程。课程以开展工程实践为目的,注重创新意识的培养,重点培养学生自主学习、自主研究能力和团队合作能力[2]。智能循迹小车作为一种融合自动控制、传感器检测、信息处理、计算机软硬件设计等多学科知识,集机电于一体的综合系统,成为该课程的实践平台。通过平台训练,帮助电气信息类和其他理工科专业一年级学生形成工程设计的思想、方法和技能。
本小车以单片机为控制核心,通过红外光电传感器识别路面引导黑线,设计了一种基于增量式PID控制算法,该算法根据检测的位置信息来调节左右侧电机的转速及方向,使小车平稳、流畅地沿着黑线行进。所有软硬件开放,学生可以在此基础上进行深入开发和创新改造。
1 系统总体方案设计
1.1 智能小车系统构成
智能小车采用四轮驱动方式,具有状态检测、路径识别、方向控制、速度控制等功能。智能车系统框图如图1所示,主控单元采用STC89C52RC;路径识别模块用于循迹,若改变对管方向还可以实现壁障功能;电机驱动模块驱动4个直流电机;由充电控制板和充电电池组成的电源提供3路5 V电源输出。

图1 智能小车系统框图
1.2 智能小车硬件设计
1.2.1 主控制器模块
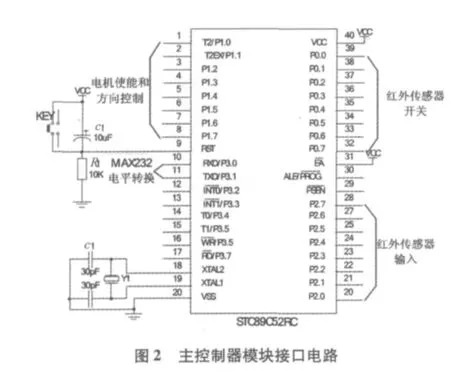
如图2所示,主控制器模块由单片机 STC89C52、晶振电路、复位电路、max232芯片和串口组成的 ISP下载电路等构成[3]。它是智能小车的控制中枢,在循迹中发挥3个作用:(1)路径识别;(2)增量式PID控制算法实现;(3)电机控制。
1.2.2 电源管理模块
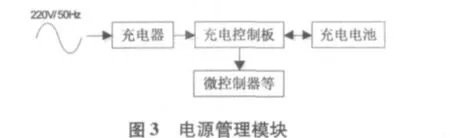
如图3所示,由充电控制板和充电电池组成的电源为微控制器、光电管板、电机驱动板提供5 V的电源。充电控制电路由开关管MTD2955E、比较器LM311和电压基准等组成。充电时,电源外接12 V/500 mA的市电充电器,充电控制板对4节1.2 V镍氢充电电池充电。放电时,电池供电回路接通,电池通过充电控制板上的端子输出5 V的电源。
1.2.3 电机驱动模块
小车由四轮驱动,四个轮子分别由四个电机控制。
(1)调速原理。实验中采用额定电压为5 V的直流电机,使用PWM(脉冲宽度调制)调速。PWM调速即通过改变脉冲高电平的宽度来调节加在电机两端的平均电压从而改变电机转速。
(2)驱动电路。如图4所示,采用三极管MMBT4401等分立器件构成H桥电路驱动电机,并用三输入或非门74HC27实现对电机转动方向的控制。在每个电机两端并联1 uF的独石电容,以消除火花和电磁干扰。

图4 电机驱动电路
1.2.4 路径识别模块
路径识别是体现智能车智能水平的重要指标[4]。路径识别效果与传感器的选择、数量、灵敏度以及道路宽度、传感器间距有直接的关系。
红外传感器检测电路如图5所示。SW为高电平时,传感器发射管工作,当发射光遇到黑色物体时,SEN为低电平,反之,SEN为高电平。SW为低电平时,传感器发射管不工作。
本设计共采用8路光电传感器,4路位于左侧,另4路位于右侧,左右两侧间距为轨道宽度,两侧的传感器紧挨着安装,如图6所示。当小车沿着引导黑线前进时,8路传感器输出高电平;当小车偏离引导黑线时,8路传感器中的某1路或某2路输出低电平,小车做出响应后左右侧电机速差使小车纠正回到引导黑线,从而实现循迹[5]。

图5 红外传感器检测电路
1.3 智能小车控制算法设计
本设计中,采用增量式
PID控制算法实现小车循迹的速度控制。增量式PID控制算式[6]:
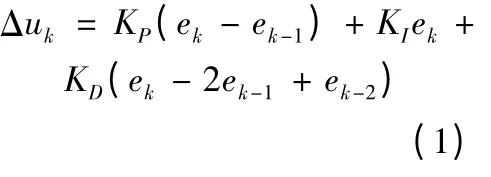
其中Δuk为控制量增量,
KP、KI、KD分别为比例、积分、微分系数,ek为位置设定值与第 k次采样实际位置值的偏差。
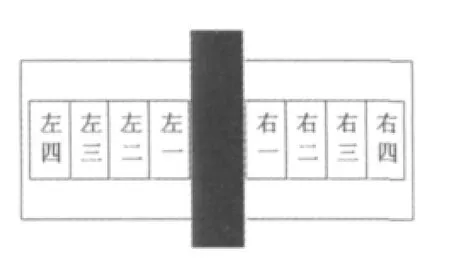
图6 传感器安装位置
在采样周期Ts内,检测一次传感器状态,得到左右侧传感器状态slk与设定值ss比较得到偏差ek。将偏差代入式(1)中计算得到电机转速增量 Δuk。式(1)中的参数 KP、KI、KD,采用尝试法确定,即对各个参数取不同的值,根据循迹效果来确定,顺序为:(1)令 KP=0,KD=0,确定 KI;(2)KI已确定,令 KD=0,确定KP;(3)KP、KI已确定,确定KD。
左右两侧电机转速由下式得到:
其中,Ustd为小车未偏离引导黑线时的前进速度。
该设计中,由于光电传感器的静态工作电流较大,传感器采用间歇的工作方式,即检测时开启传感器,不检测时切断传感器的供电。主程序流程如图7所示,循迹流程如图8所示。
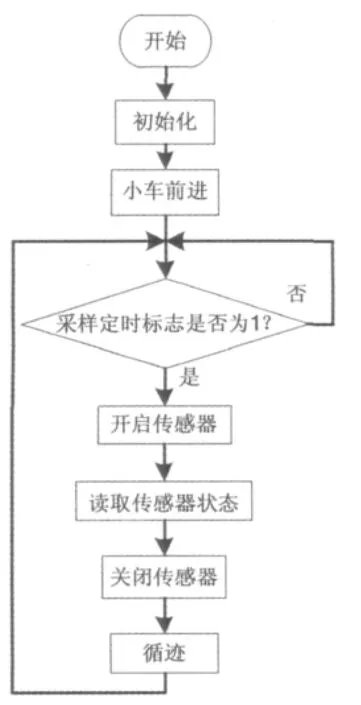
图7 主程序流程
2 智能循迹小车实践平台在创新类课程中的探索
由于本设计涉及微机原理及其接口技术、电子技术、C语言程序设计、EDA技术、自动控制原理等课程,学生通过小车实践平台可以了解这些相关课程的基本要求和大概过程,为今后课程学习打下基础,并通过实践提高发现问题、分析问题、解决问题的能力,进而逐步培养其创新能力。
2.1 智能小车的焊接组装
小车由金属车身、塑料车轮、带塑料变速箱的直流电机、电机驱动板、充电板、光电管板和单片机最小系统板等组成。最小系统板的原件为直插封装,其他电路板除电解电容、电位计和接插件为直插封装外,所有元件为贴片封装。车体分为两层,各电路板通过螺丝螺柱固定在底层金属板和顶层塑料板上。通过焊接电路板、组装小车,学生可以增加对元器件的感性认识,同时焊接能力、机械动手能力也得到有效提高。图9为组装好的小车实物。
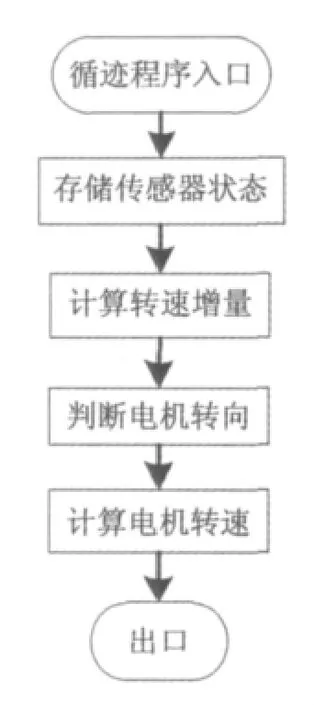
图8 循迹流程
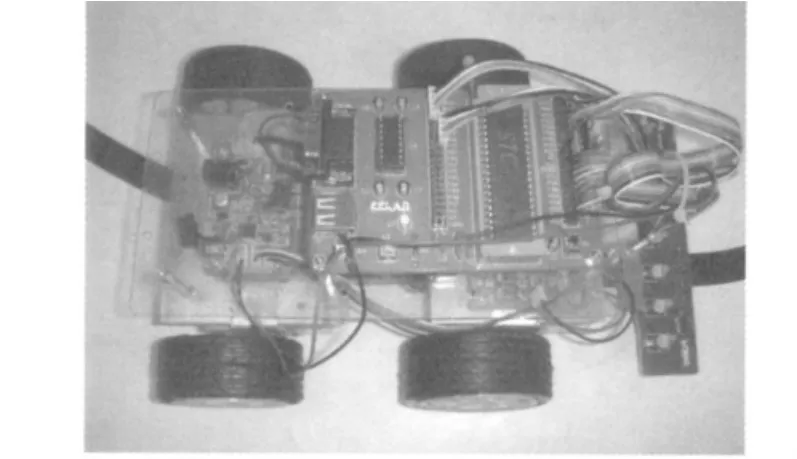
图9 智能小车实物图
2.2 单片机C程序开发
本设计中的单片机最小系统板,可由USB供电也可由外部5 V电源供电,只需要一条串口线或USB转串口线便可将编译好的程序下载到单片机中。微处理器STC89C52RC是一款51系列单片机,内部结构简单,易于上手。开发环境为KEIL uVision,该环境提供了丰富的库函数和功能强大的调试工具,支持51系列
及51系列兼容单片机。编程采用C语言,该语言与传统的汇编语言相比,可读性好,易于移植,便于激起学生开发硬件的兴趣,也顺应了目前硬件开发的趋势[7]。
2.3 合应用能力培养
在单片机最小系统板中,处理器的所有引脚以插针形式引出,并预留了5V电源输出;小车为四轮驱动,负重能力较强;电池充电后即可重复使用。因此,该小车系统具有很强的扩展性,学生可以在现有基础上,添加传感器模块,进行壁障、竞速、踢足球等应用扩展,不断提高综合应用能力。
3 结束语
通过调试和实验,本文设计的循迹智能小车各部分工作正常,小车能很好地识别路径,运行稳定,有一定的抗干扰能力。学生通过该智能小车平台的制作设计,训练电工电子实践方面的基本技能,熟悉硬件开发的流程,初步培养专业应用能力,为后续的学习科研打下良好的基础。
[1]曲伟,邱成军,刘明亮,等.电工电子实验教学中心实践教学体系建设与实践[J].实验室研究与探索,2010,29(7):216-218,224.
[2]黄辛超,殳国华.用于创新类课程平台智能小车实验系统的设计[J].实验室研究与探索,2009,28(12):7-9,23.
[3]胡汉才.单片机原理与接口技术[M].北京:清华大学出版社,2004,240-244.
[4]黄杰,秦补枝.基于模糊控制的智能循迹小车的设计[J].中国科技信息,2010,22(20):148-149.
[5]金立,贾存良,王梅.基于PIC单片机的智能循迹小车设计[J].工矿自动化,2010,28(8):129-132.
[6]汪英.带死区的增量式PID控制在湿度控制中的应用[J].长沙通信职业技术学院学报,2008,7(2):55-60.
[7]陈亮.单片机课程的教学改革[J].实验室研究与探索,2008,27(9):121-123.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年22期)2018-11-19 02:54:18
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2018年8期)2018-06-26 06:43:02
电子制作(2017年1期)2017-05-17 03:54:20
