
激光三维扫描监测圆柱体变形
2012-12-11 06:08尹玉廷王解先
测绘通报 2012年1期
尹玉廷,王解先
(1.同济大学,上海200092;2.上海市测绘院,上海200129)
一、引 言
激光三维扫描源于激光雷达(LiDAR)测量技术,是20世纪90年代发展起来的一种快速获取物体三维空间信息的技术手段,是空间点阵扫描技术和激光无反射棱镜长距离快速测距技术结合而产生的一项新测绘技术。该技术通过非接触式主动测量可进行大面积高密度空间三维数据的采集,使测绘从传统的单点数据采集转变为密集、连续的自动数据获取,极大的增加了信息量,提高了工作效率,拓宽了测绘技术的应用领域。
激光三维扫描可以实现大型工业结构件、房屋建模、工程建筑物变形监测,矿山、隧道测量以及地形地貌监测等多个方面。本文将通过实例数据,分析研究激光三维扫描监测圆柱体变形的应用。
二、扫描数据
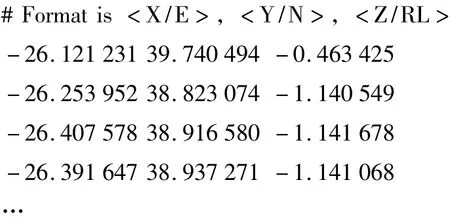
为检测某直立圆柱设备的变形情况,采用Leica激光三维扫描仪对圆柱体扫描,采用随机软件将扫描得到的点云数据进行测站合并,测得情况如表1所示,共扫得168 469点。数据格式为:
在AutoCAD中的站点图如图1所示。
扫描得到的点云数据包含底座和上部其他构建,取出 x自 -25.8 至 -24.8,y自 39.0 至 40.2,h自-1.0至5.0的点,结果如图2所示,共有52 859点。从图中可以看出,点云数据中显然还包含一些非圆柱上的点,需要进行剔除。
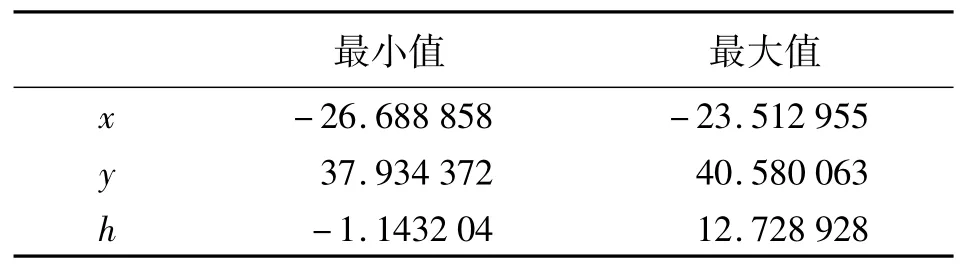
表1 扫描得到坐标的范围 m

图1 圆柱体扫描图像
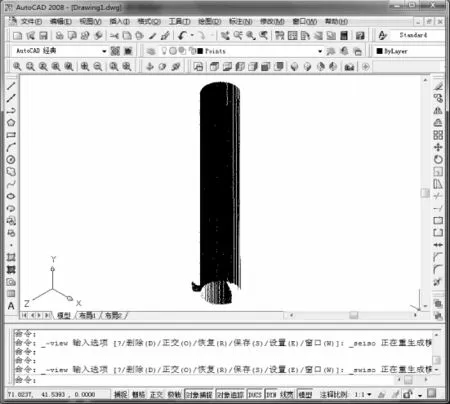
图2 切割后的圆柱体扫描图像
三、圆柱拟合
设中心轴线方程为


将轴线方程(1)代入平面方程(2),求得

中心轴线与该垂直面的交点坐标RP为

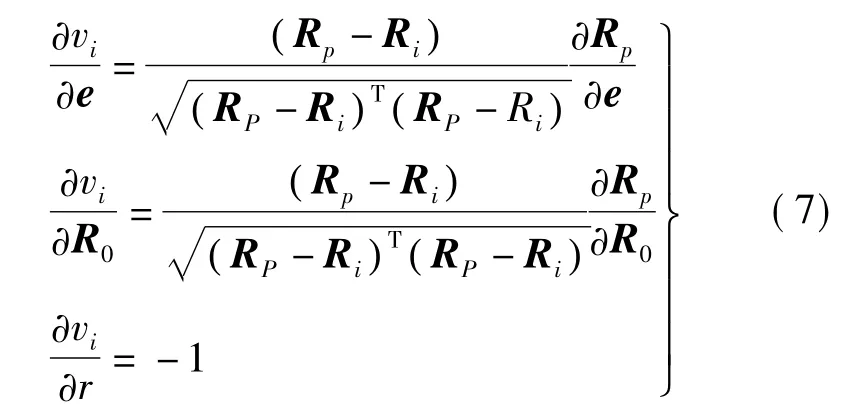
观测点与交点的距离为

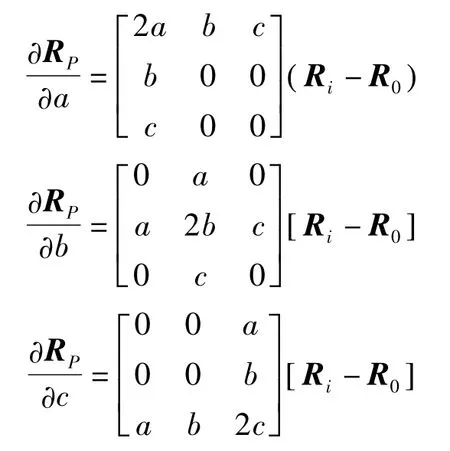
误差方程列为

式中,r为圆柱体半径。
线性化误差方程得到
由误差方程组成法方程,并在以下2个条件下求解。
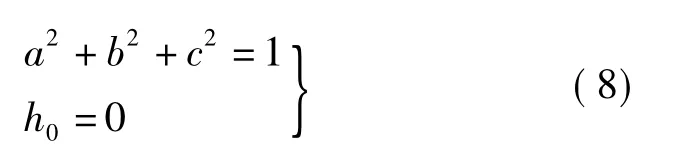
求解的7个参数是为(a b c),(x0y0h0),R。
各次解算收敛后,剔除残差大于3倍中误差的点,直至没有大残差点,解算情况如表2所示。
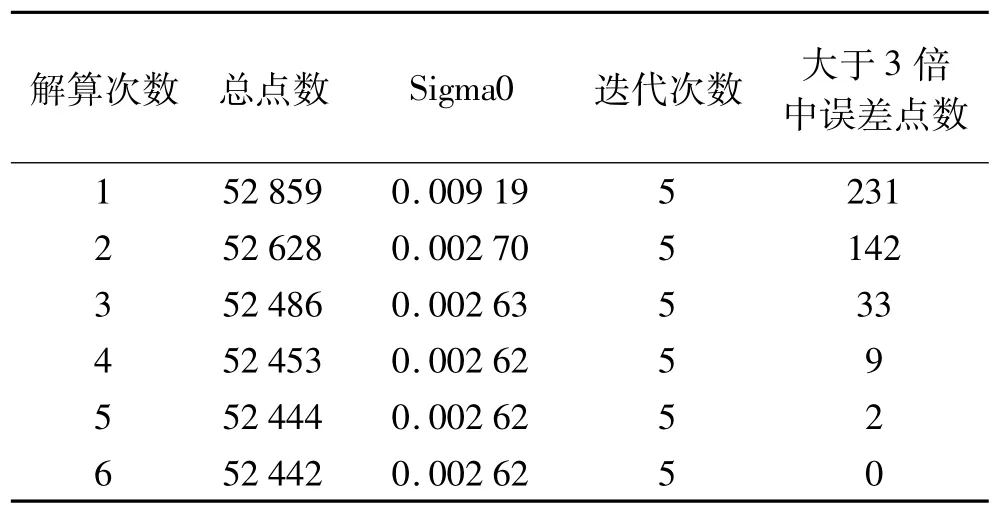
表2 解算情况
最终解得:
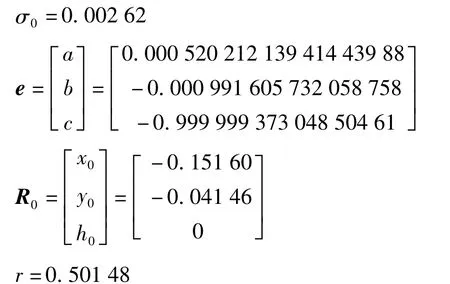
圆柱的垂直度为e与h轴的夹角:cos-1()c=139″.5。
各点残差如表3所示。
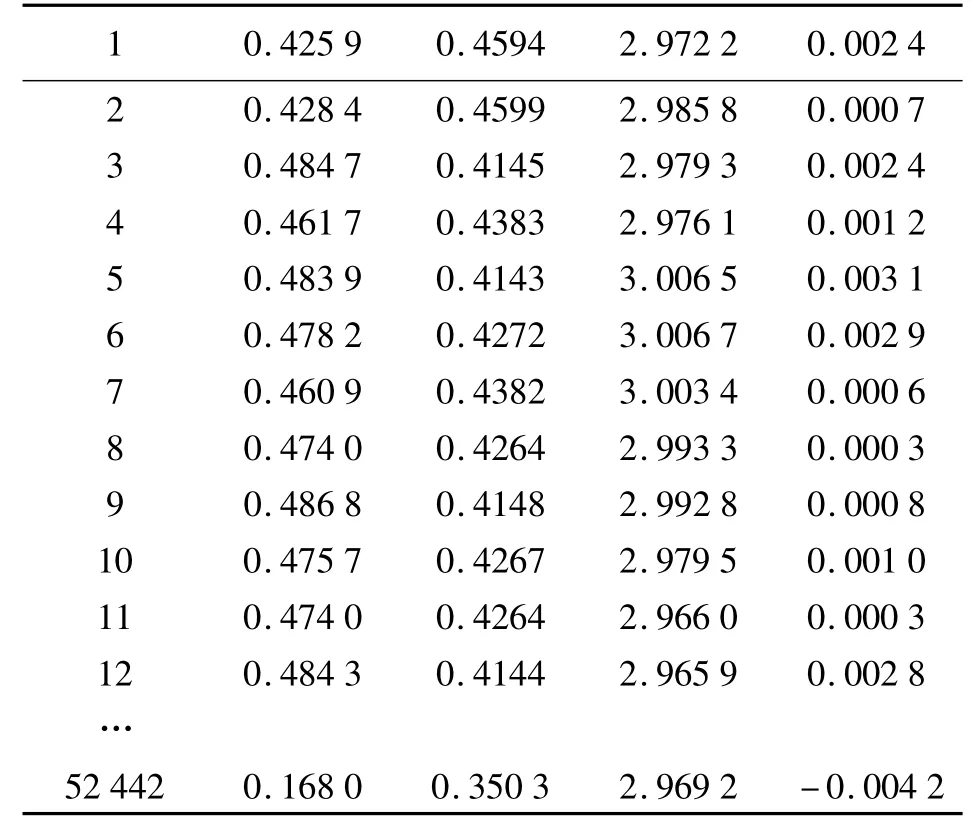
表3 观测点残差
剔除粗差后的观测点共52 442点,重新画出如图3所示。
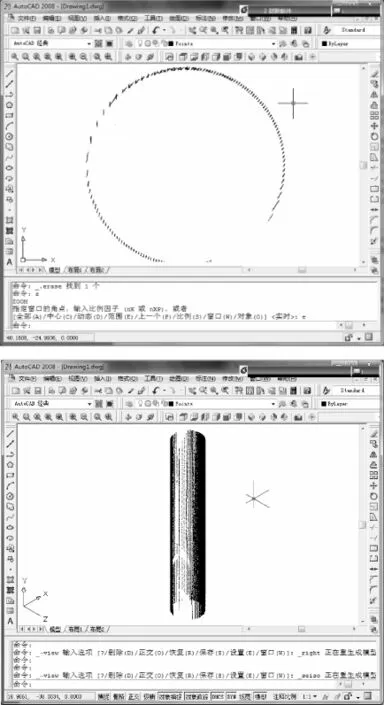
图3 拟合剔除粗差后的圆柱体扫描图像
四、结束语
本文通过实例数据,研究分析激光三维扫描数据圆柱拟合的计算方法,将粗差剔除,得到精确的圆柱体扫描图像。试验结果表明,激光三维扫描可快速获得被测对象表面每个采样点空间立体坐标,获得被测物体的精确形状结构,提高了工作效率。
地面三维激光扫描技术作为测绘与地理信息科学的先进技术,具有广泛的应用。随着数字化技术的迅速发展以及各个领域对获取原始数据信息需求的日益增多,激光三维扫描将在变形监测等方面具有广阔的应用前景。
[1]王晓峰.三维激光扫描技术在土木工程领域的应用[D].上海:同济大学,2009.
[2]徐进军,张民伟.地面三维激光扫描仪:现状与发展[J].测绘通报,2007(1):47-50.
[3]KOUKOULAS S,BLACKBURN G.Mapping Individual Tree Location,Heightand Species in Broadleaved Deciduous Forest Using Airborne LiDAR and Multi-spectral Remotely Sensed Data[J].International Journal of Remote Sensing,2005,26(3):431-455.
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
小学生学习指导·高年级(2022年2期)2022-02-16
振动与冲击(2022年1期)2022-01-27
小学生学习指导(高年级)(2021年6期)2021-06-19
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
娃娃画报(2016年6期)2016-07-29
中学生数理化·八年级数学人教版(2016年3期)2016-04-13
河南科技(2015年8期)2015-03-11
物理与工程(2010年5期)2010-03-25
