
无人机载单CCD四波段多光谱相机的几何预处理
2012-12-11 06:07刁静静袁占良陈继平余涛张建霞张钰萌
测绘通报 2012年1期
刁静静,袁占良,陈继平,余涛,张建霞,张钰萌
(1.河南理工大学测绘学院,河南 焦作454000;2.中国科学院 遥感应用研究所遥感科学国家重点实验室,北京100101;3.国家航天局航天遥感论证中心,北京100101)
一、引 言
无人机遥感是一种新的遥感手段,具有快速、灵活、低成本、高影像分辨率等特点[1]。无人机遥感作为卫星遥感不可缺少的补充手段,具有在云下低空飞行能力,弥补了卫星光学遥感和普通航空摄影经常受云层遮挡获取不到影像的缺陷;具有灵活机动的特点,无需机场起降,可进行车载起飞、伞降和水面降落等多种方式,能够弥补卫星遥感、航空遥感在时效性方面的不足;由于无人驾驶,回避了飞行员人身安全的风险;可以到达交通工具和人员所不能到达的受灾及危险区域,因此无人机遥感非常适于救灾应急等[2-3].
中科院遥感所研制的单CCD四波段航空遥感相机是一种目前已实现的、能达到实用化标准的、可同时应用于多种航空遥感平台(小型飞机、无人机、飞艇等)的结构小巧、使用灵活的对地观测多光谱CCD相机,其特点主要体现在两个方面:
1)单面阵CCD感光器件,多光谱通道共享感光光路,分时切换。相机体积、重量、系统功耗的减少,为实现简易航空遥感平台(特别是无人机、飞艇等)的搭载作业提供了技术保证。
2)在可见光范围内可以方便地实现对不同地物特定光谱信息的自由获取,曝光控制时间间隔可调,使得该相机不仅能完成画幅式常规对地观测,还能胜任对特定地物的多角度遥感观测。
该CCD相机应具有获取4个波段(R、G、B、近红外)图像的能力,采用单一光谱信息采集光路、转轮滤光片顺序切换的系统结构,实现对不同波段光谱图像的采集。其经无人机或其他小型航空器搭载,可充分发挥无人机机动灵活、受天气影响小、高位作业、应急性高等特点,通过4个可更换的滤光窗口可获得水体、水汽、气溶胶参数,在水文环保调查、大气监测等领域,可提供比遥感卫星、大飞机遥感更及时、更方便的光谱影像。因此,本文对其进行了图像几何预处理分析,以便多光谱影像的后续研究处理。
二、影像的几何处理
遥感图像的几何校正是遥感信息处理中一个十分重要的环节。与卫星遥感影像相比,航空遥感影像不需考虑地球自转及地球曲率的影响。在发生几何畸变的诸多原因中,其可校正的有传感器内部误差、外方位元素变化和地形起伏对影像的影响。几何校正过程包括两部分:①建立原始畸变图像空间与校正后的图像空间的某种对应关系,实现遥感图像像元的几何定位,即地理经纬度的校正;②利用这种对应关系把原始畸变图像空间中全部像素变换到校正后的图像空间中的对应位置上,完成校正后的图像空间中每一像元亮度值的计算,即对原始遥感图像数据进行重采样[4]。
本次航拍试验在道路的交叉口、水库坝址、河流弯曲点等,图像边缘部分特征变化大的地区[5],采用GPS野外测量尽可能均匀获取GCP。采用中心投影构像方程对航拍试验获取的4个波段的图像进行地理坐标定位。共线方程如式(1)所示
分别为摄影中心S与地面点A的地面直角坐标;λ为比例因子;R为姿态角(航向偏角φ、旁向倾角ω、像片旋角K)函数的旋转矩阵[6]。
原始遥感图像的像元经过坐标校正后,得到的待输出图像仅仅是地理空间位置得到纠正,而图像中像元没有灰度值。这就需要根据原始遥感图像中像元的灰度值,求得地理空间位置校正后的像元灰度值,进而得到一幅完整可以使用的图像。
灰度重采样时常使用的重采样函数有:最邻近像元法、双线性内插法、双三次立方卷积插值法等[7]。
最邻近像元法是选择与输出点最临近的像元灰度值作为新像元点的灰度值。假设采样点的最邻近点坐标为(k,l),和采样点坐标(x,y)之间的关系为式(2)所示,即

则采样点灰度值就为f x,()y=f k,()l。
双线性内插法的采样方式是利用畸变影像采样点周围的4个邻近像素灰度值进行二维线性插值,输出灰度值由这4个像素点对采样点的距离而定。假设目的像素通过间接变换得到原影像坐标为(i+u,j+v),其中 i、j是非负整数,u、v 是[0,l]区间内浮点数,则目的像值f(i+u,j+v)为式(3)所求。双三次立方卷积插值法的采样方式如式(4)所示,且其中x表示采样点邻近像素的x坐标,将x换为y则可得邻近像素的y坐标。
三、各波段影像的几何处理
此次航拍试验获取的近红外、R、G、B 4个波段的影像数据如图1所示。灰度值重采样采用双线性插值法的校正图像如图2所示。以近红外波段影像为例对3种重采样方法进行比较,最邻近像元法、双三次立方卷积插值法的采样方式校正的近红外影像分别如图3所示。
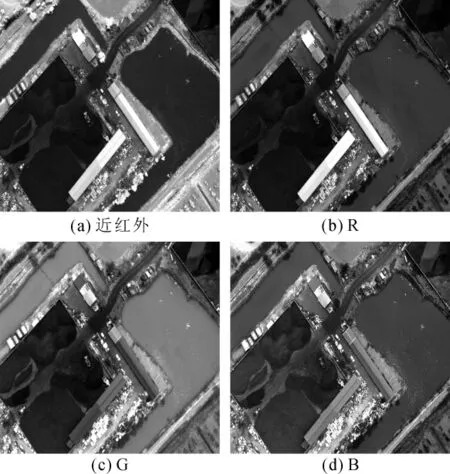
图1 原始影像
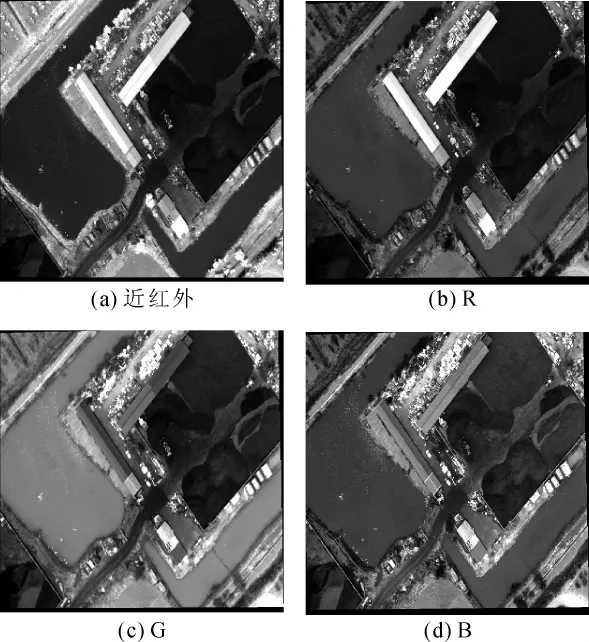
图2 双线性插值法
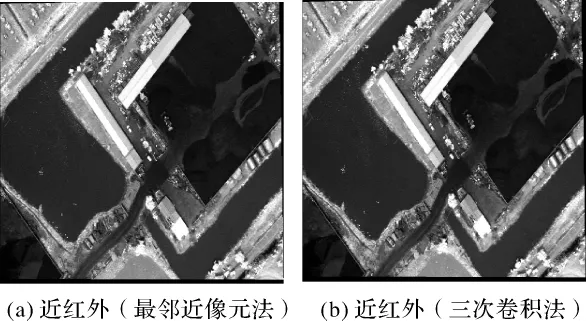
图3 近红外影像
由图可得,最邻近法方法简单,但影像上容易出现马赛克现象,光滑的边界出现锯齿现象。双线性内插法使几何精度提高,输出影像具有灰度连续性,但是计算量有所增大,有低通滤波的效果使校正后的影像轮廓变得模糊。双三次立方卷积插值法计算精度高,影像的亮度连续较好,比双线性内插法的边缘锐化,但计算复杂且会破坏原始的数据。
四、结束语
采用3种重采样方法对航拍影像进行了处理,最邻近像元法、双线性内插法、双三次立方卷积插值法其计算逐渐复杂,精度越来越高。此单CCD四波段多光谱相机不仅能搭载在无人机等小型航空器上,而且能够同时获取近红外、R、G、B 4个波段的影像。校正后的各波段影像能够满足遥感影像的进一步研究分析,促进了我国低空无人机搭载多光谱相机系统的发展,但其在航拍中的稳定性仍需进一步改善。
[1]崔红霞,孙杰,林宗坚.无人机遥感设备的自动化控制系统[J].测绘科学,2004,29(l):47-49.
[2]周洁萍,龚建华,王涛,等.汶川地震灾区无人机遥感影像获取与可视化管理系统研究[J],遥感学报,2008,12(6):877-884.
[3]洪宇,龚建华,胡社荣,等.无人机遥感影像获取及后续处理探讨[J].遥感技术与应用,2008,23(4):462-466.
[4]曾丽萍.遥感图像几何校正算法研究[D].成都:电子科技大学,2005.
[5]CURLANDER JC.Location of Spaceborne SAR Imagery[J].IEEE Transactionson on Geoscience and Remote Sensing,1982,3(20):359-364.
[6]VINCENT T C,HU Yong.Image Rectification Using a Generic Sensor Model Rational Model[J].International Archives of Photogrammetry and Remote Sensing,2000,XIX(B4):874-881.
[7]杨高攀.遥感影像几何校正方法研究与应用[D].西安:西安建筑科技大学,2010.
猜你喜欢
时代邮刊·下半月(2020年9期)2020-09-23
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
作文通讯·高中版(2017年6期)2017-07-10
系统工程与电子技术(2016年7期)2016-08-21
高师理科学刊(2016年8期)2016-06-15
