
地下工程陀螺定向测量软件开发
2012-12-11 06:07:52王亚江胡世雄
测绘通报 2012年1期
王亚江,胡世雄
(73603部队,江苏 南京210049)
一、引 言
在世界高速发展的今天,一方面人类的活动不断扩大,已从地面向空中、地下、水下,甚至太空开展;另一方面传统人类地面可利用的相对空间越来越狭小,特别是在人口密集的城市矛盾越来越突出。开发地下空间以成为人类扩展活动空间的一个重要的发展方向,最为典型的为地铁的建设和发展。
在地下工程建设中,由于GPS、天文等技术手段失效,而导线测量存在误差积累,陀螺经纬仪定向技术有着重要的作用。其作用主要有:一方面解决地下导线的起始方位角问题;另一方面在地下导线中加测一定数量的陀螺方位边,可限制偶然误差的积累,改善地下控制网的强度和精度保证整个工程的准确贯通。
地下工程陀螺定向测量主要由以下步骤:
1)在已知方位的边上测定仪器常数;
2)在待定边上测定陀螺方位角;
3)在已知边上重新测定仪器常数;
4)计算测线的坐标方位角。
在实际地下工程陀螺定向测量中,会遇到一些实际问题,也要解算许多数据,为此编写地下工程陀螺定向测量软件,同时为方便使用,该软件分为桌面机版和手机版。
二、地下工程陀螺定向测量软件
地下工程陀螺定向测量软件主要根据实际地铁测量、隧道测量中要处理的数据及遇到的一些问题编写而成,主要由地面方位角计算、地下方位角计算、偏心角计算、收敛角改正、初定向、对比结果等几个模块组成。
1.坐标方位角计算
坐标方位计算模块由地面方位角计算和地下方位角计算两部分组成。在地下工程设计、施工中采用的坐标系一般为平面直角坐标系,其坐标值一般采用XYH或XYZ方式表达。在地面控制网布设中,现在一般采用GPS布网,或GPS和导线组合布设控制网,地面控制点坐标以其施工坐标系中的坐标XYH或XYZ方式表达。地下测量中主要依靠导线测量,导线以边角方式传导坐标,同时在施工放样中,也采用将坐标值转化成边角关系进行放样。因此,工程方提供的方位边往往以两点的坐标形式提供,在陀螺经纬仪定向测量时,由于陀螺经纬仪时测定方位角的仪器,就需要将坐标形式转化成边角形式,即需要进行坐标方位计算,坐标方位计算公式如式(1)所示。
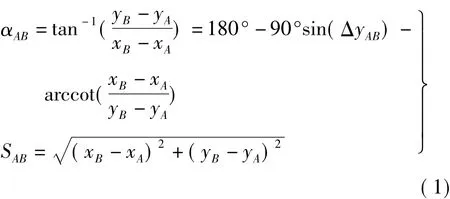
式中,αAB为方位边的方位角;xA、yA、xB、yB分别为坐标点A、B的坐标。
在实际陀螺经纬仪定向测量中,地面方位边用于检定陀螺经纬仪仪器常数,地下方位边用于测方位边,所以在软件设计时分为地面方位角计算和地下方位角计算两部分,其软件界面如图1所示。
2.仪器常数
陀螺经纬仪仪器常数是陀螺北与经纬仪或全站仪0刻划之间的夹角。在实际工程项目中,其采用的坐标系为独立的工程坐标系,且一般为平面直角坐标系。实际工程项目中的陀螺经纬仪仪器常数为在工程坐标系下,坐标北与陀螺0方位之间的夹角,也可理解为在工程坐标系下的基线边坐标方位与陀螺经纬仪所测得的方位值的差值,用公式表示为

式中,E为仪器常数;Tcoord为基线的坐标方位角值;TGyro为陀螺经纬仪所测基线的方位值。
实际中,由于子午收敛角存在,该仪器常数中包含子午收敛角。
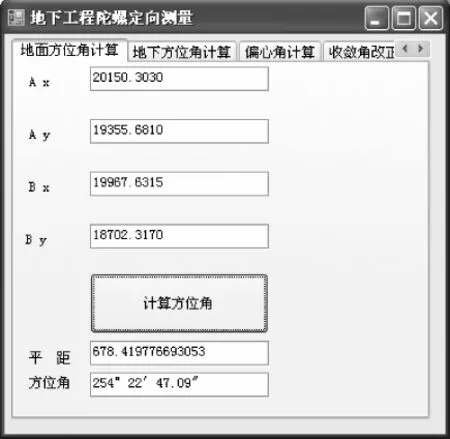
图1 方位角计算
3.子午线收敛角改正
工程中使用的坐标系为平面直角坐标,而陀螺经纬仪实际所工作的坐标系为大地坐标系。地球的形状接近于旋转椭球面,椭球面是一个不可直接展开的曲面,大地坐标经过高斯投影得到平面直角坐标后,必然有投影变形,子午线投影后向中央子午线弯曲,并向两极收敛。采用陀螺经纬仪定向最终是获取待定边在工程坐标系下的坐标方位角。子午收敛角计算的软件界面如图2所示。
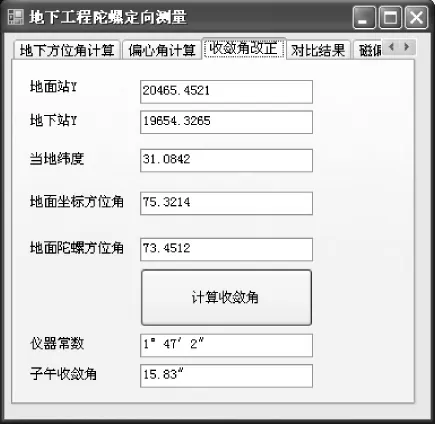
图2 子午收敛角计算
4.偏心角计算
相对于全站仪,高精度陀螺经纬仪一般体积要大,重量要重许多,这样就存在一些导线点载体无法架设高精度陀螺经纬仪。如在地铁施工中,作为导线点载体测量墩安装在隧道壁沿上,这些测量墩能很好地满足全站仪的测量需求,但无法高精度陀螺经纬仪的重量。采用偏心测量可以很好地解决以上问题。如图3所示,方位边AB为待定向方位边,导线点A和导线点B受到限制,无法直接架设陀螺经纬仪或陀螺全站仪,选择一个适合架设陀螺经纬仪或陀螺全站仪的位置C,架设陀螺经纬仪或陀螺全站仪,测量方位边CB的方位角TCB,量取边AB的水平距离SAB和边AC的水平距离SAC和∠ACB的角度值γ,根据式(3)可求得∠ABC的角度值β,在根据式(4)即可求得方位边AB的方位角TAB。软件界面如图3所示
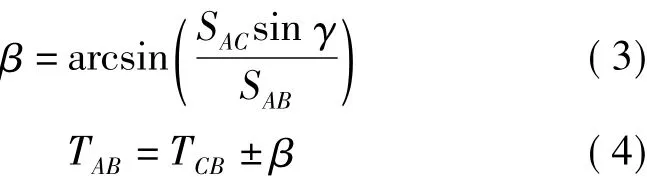
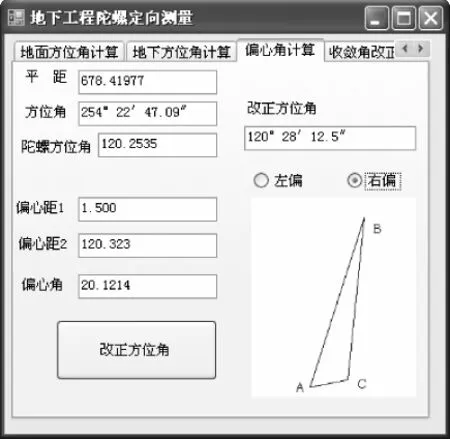
图3 偏心测量示意图
5.初定向
陀螺经纬仪定向中初始架设方位的精度直接影响自动陀螺经纬仪的测量精度和测量时间,甚至造成无法定向。在地下设施中有许多铁磁物体和电气设备,磁场受到干扰;同时受到磁偏角的影响,采用磁方位法进行陀螺经纬仪初始架设方位精度低,甚至不能确定初始架设方位。软件中采用分利用工程坐标系中导线方位角与经纬仪水平角读数进行自动陀螺经纬仪初始定向的方法,软件界面如图4所示。
6.结果对比
地面控制点坐标经过边角导线测量、联系测量,将坐标传导至地下方位边,通过方位角计算后,得到工程坐标系下的坐标方位角,地面控制点和地下控制点处于同一工程坐标系。地下方位边经过陀螺经纬定向后,经过地下工程陀螺定向测量软件的方位角计算、偏心角改正、收敛角改正、仪器常数改正等步骤后,得到工程坐标系下的陀螺方位角,地面方位边与地下方位边处于同一工程坐标系下。这样同一地下方位边通过不同的技术手段得到两组方位角结果,在不考虑误差的情况下,两者应该相等。但实际应用中,由于导线方位角传递积累误差、陀螺经纬仪测量精度误差、联系测量误差等一系列误差的存在,两者结果并不一致。对同一方位边,将导线测量得到的方位角与陀螺定向测量得到的方位角在同一坐标系下进行对比可以有效地发现粗差,同时为控制网的优化提供重要的保障。软件界面如图5所示。
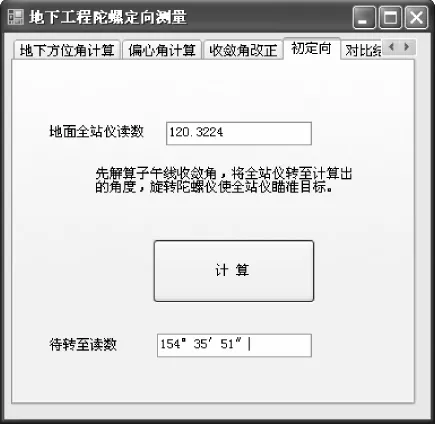
图4 初定向
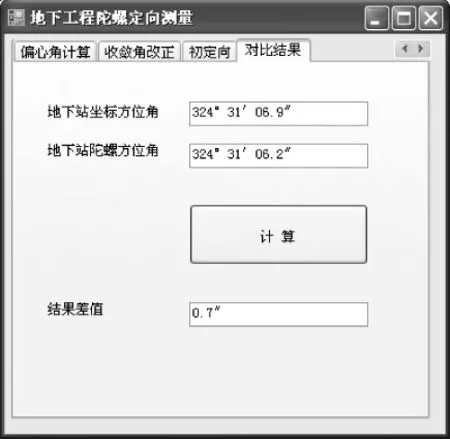
图5 结果对比
三、结束语
该软件在上海地铁陀螺定向测量、郑州地铁陀螺定向测量、西秦岭隧道陀螺定向测量中得到了实际应用,取得了很好的效果,特别是全国最长隧道—西秦岭隧道(全长28 km),在该软件的指导下完成陀螺定向测量工作,很好地证明了该软件的实用性和可靠性。
[1]薛志宏,李广云,王留朋,等.陀螺定向中子午线收敛角的计算方法与精度分析[J].测绘通报,2009(12):43-45.
[2]煤炭科学研究院唐山分院陀螺经纬仪组.陀螺经纬仪基本原理、结构与定向[M].北京:煤炭工业出版社,1982.
[3]范百兴,王飞,李广云,等.陀螺经纬仪偏心度检定技术研究[C]∥2009年全国测绘仪器综合学术年会.宜昌:[s.n.],2009.
[4]于来法.陀螺定向测量[M].北京:解放军出版社,1988.
猜你喜欢
宇航计测技术(2022年2期)2022-06-01 09:34:44
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
测控技术(2018年3期)2018-11-25 09:45:50
快乐语文(2018年36期)2018-03-12 00:56:02
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
