微型磁电阻效应传感器的空间应用前景
2012-12-04 01:02:06郑阔海杨生胜李存惠孔风连姚日剑
真空与低温 2012年2期
郑阔海,杨生胜,王 鹢,赵 琳,李存惠,孔风连,姚日剑
(兰州空间技术物理研究所,真空低温技术与物理重点实验室,甘肃兰州730000)
1 引言
上世纪90年代冷战结束后,各航天大国军备预算大幅下降,以美国为首的航天大国的空间研发基金投资发生巨大转向,其结果就是现代化小型航天器的出现。这些小卫星的研制宗旨是以廉价的成本投入,完成传统航天器的使命。NASA等将小卫星定位为FCB(快速,廉价,优质)[1]。这些小卫星通过商业化道路以吸引民间闲散基金;通过减小自身重量的优势以降低发射成本;通过商业替代品作为载荷以缩减载荷成本,这有效缓解了各国军备预算的压力。使得小卫星通过商业化运作的途径,更容易吸收最新科技成果。
小卫星重量不超过500 kg,目前各国小卫星研制多指向纳米卫星(1~10 kg)和微卫星(10~100 kg)。空间环境监测及新技术的空间适应性验证是小卫星的历史使命之一。空间磁场监测是空间环境监测的重要内容,传统的磁通门受尺寸、重量、功耗及成本的限制,很难应用于小卫星。得益于半导体和集成工艺的飞速发展,基于磁电阻效应的MR(MagnetoResistance)磁电阻传感器异军突起,成为小卫星进行空间磁场测量的首选。
2 空间磁场测量的需求
空间磁场测量是磁测量技术重要应用方向之一,包括磁场强度及方向的测量。空间磁场测量的需求主要包括以下几个方面[2]:
1)航天器姿态控制空间磁场范围很宽(5×10-3nT~2×106nT),运行于低地球轨道的航天器受地磁场的影响,产生姿态扰动而影响姿控;对于无严格定向要求的航天器,采用磁测量方法进行姿态控制是通用方法。
2)航天器动力源低地球轨道航天器作切割磁力线运动,产生磁阻尼,并导致表面电位升高,如ISS感生电动势高达20V;通过航天器的合理设计,可将磁阻尼转换为动力,如Tether。
3)星体内部结构遥测磁场测量是仅有的可以了解星体内部信息的遥测手段之一(重力测试是另一种遥测手段),而不是单单针对星体表面及大气结构进行研究。
4)空间天气学空间天气已经发展为一门独立的学科,空间磁测量是其重要研究内容。美国的空间天气计划,NASA的LWS(Living with a Star)计划以及包括NASA的日地探测器在内的太阳-地球体系研究都将空间磁场测量技术作为其关键技术之一。欧洲、俄罗斯、及日本都制定了类似磁测量计划。
5)深空探测通常地磁场对中高轨道的影响可以忽略,但更远的深空受太阳风及星际粒子的影响存在星际磁场,通过磁场测量可以获得太阳系内不同星体的信息,如Appollo及Lunar Prospector(LP)给出了关于月球磁场的详细信息。所以深空磁场探测具有重要的科学价值。
3 磁场测量技术
磁传感器种类很多,每种传感器都有自己的优点和缺点。表1给出了美国NIST对磁传感器调研的结果[3]。

表1 各种磁传感器比较/数据来自美国NIST
1)检测线圈
检测线圈技术是一项基于法拉第电磁感应定律的成熟的,低成本,高灵敏度技术。检测线圈是一种通量传感器,只有采用大线圈才能获得很高的灵敏度。
2)霍尔磁传感器
霍尔磁传感器是基于霍尔效应的一项成熟技术,该类型传感器在很宽的尺寸范围内(1μm~1mm)都具有较高灵敏度。但信噪比较低,测量频率小于1kHz。优点是可对大尺寸范围进行检测,缺点是温度稳定性差。
3)磁通门
磁通门以软磁芯对磁场的非线性响应为基础。利用AC信号激励初级线圈驱动软磁芯,通过检测次级线圈的二次谐波信号获得待测磁场的信息。磁通门具有高灵敏度,其系统也相对简单。近年来尽管也出现了各种磁通门微型化技术,但与半导体工艺兼容性差,很难进行集成化。磁通门作为一种通量传感器,由于体积较大,功耗较高,NIST的研究结果表明低噪声的薄膜磁通门几乎是不可实现的。
4)超导量子干涉仪
SQUIDs是目前最灵敏的磁场传感器,其基本原理是基于超导约瑟夫森效应和磁通量子化效应。此传感器也是一种通量传感器,但需工作在低温环境(~77 K)。目前,SQUIDs技术及其系统测量精度已接近理论水平。但受工作温度限制,很难在空间应用。
5)各向异性磁电阻传感器
AMR磁传感器是利用各向异性的磁性材料在不同磁场方向和外部电流条件下,磁致电阻不同的现象制成的磁传感器。AMR也是一种成熟的技术,根据需求不同传感器尺寸约在1μm~100 μm,可与半导体电路进行集成并能实现阵列化。AMR传感器灵敏度取决于各向异性磁致电阻效应(<5%)的大小,其1/f噪声较GMR和TMR低,只是由于磁致电阻较小,输出信号较弱。
6)巨磁电阻传感器
GMR效应是在磁性多层膜中发现的新效应,当相邻磁性薄膜层间因相对磁化方向发生改变而导致磁电阻发生巨大变化的一种现象。GMR效应导致的磁电阻变化可达70%,远高于AMR效应。GMR传感器的技术难点在于只有在很高的饱和场下才能获得高的磁致电阻;如何将1/f噪声降低到AMR效应的相同水平是GMR的另一技术问题。采用磁聚集器(Magnetic Flux Concentrator)后,GMR已实现10 fT/Hz0.5(1 Hz,4.2 K条件下)的高灵敏度。
7)隧道磁电阻传感器
TMR结构与GMR相似均为三明治结构,以两层铁磁性材料为电极,只是中间由非磁性金属层改为金属氧化物绝缘材料层。TMR传感器是利用两电极电子隧穿电阻的变化而制成的器件,其磁致电阻高达600%,灵敏度高是其主要特点,并兼具了AMR和GMR器件的优点。1/f噪声依然是TMR的技术难点。
AMR、GMR和TMR传感器的制造工艺与半导体工艺兼容,易于集成,因而具有低功耗、轻质量和小尺寸的优势,正符合小卫星空间磁测量任务的需求,并已进行多次空间飞行验证。此外,磁性测量传感器还有多种类型,可参考文献[3]。
4 磁阻传感器空间应用
1978年发射的MAGION-1只有15 kg,是第一个真正意义上的小卫星,其目的是研究磁层和电离层。此卫星尺寸为300×300×150 mm3,携带有矢量磁通门磁强计进行地磁场测量[4]。从此,空间用磁强计开始向微型化发展。拥有一个或几个大盒子,功耗在数瓦量级的磁通门,逐步被具有相同磁测试功能的微传感器所代替。实际上,微型传感器因为可以实现阵列化[5],并配置了温度传感器作为温度补偿,更适合应用在某些领域,从而达到磁性能要求与空间分辨率的较佳搭配[6]。
ESA的LISA(Laser Interferometer Space Antenna)卫星正说明了这一趋势。LISA任务目的是检测黑洞产生的引力波。LISA净磁条件要求十分严格,计划之初,拟采用4个磁通门进行磁环境的测量。但是,此方法很难获得LISA内部的磁场分布,最终ESA决定采用具有温度补偿的固态阵列磁传感器(MR传感器)替代磁通门磁强计进行磁场测量[7]。
从上世纪90年代开始,60%以上的小卫星采用了微型化磁传感器进行姿态控制,以UoSAT-1或OSCAR-9为标志,随后微型卫星逐渐发展并成熟起来[8]。磁阻传感器开始应用于微小卫星,如图1所示。
目前小卫星空间测量任务中,磁通门技术和MR技术均有应用。图1展示了AMR和GMR传感器从基础研究到空间应用的历史。AMR技术在上世纪90年代就已成熟,并在地面获得了广泛的应用。GMR得益于大规模集成电路技术,获得了飞速的发展。2003年,发射了几颗搭载AMR的卫星:美国的ION-F[9],加拿大的 CanX-1[10,11],Danish 的 DTUsat[12]和 AAU Cubesat[13]等。此外,西班牙的 NANOSAT、挪威的 NCubes、日本的CUTE1.7和美国的ION[14]均采用了Honeywell公司生产的AMR磁传感器。西班牙空间技术国家研究所(INTA)正在为OPTOS开发微型化的GMR三轴传感器[15]。INTA同时也在为纳米卫星NANOSAT-1B开发三轴磁电感传感器。两颗星的磁分辨率为10 nT。这些MR传感器部分执行空间磁场测量任务,部分则担负着小卫星的姿态控制任务。TMR技术由于起步较晚,目前尚未见到空间应用的报道,但美国军方已经研制成功分辨率高达pT量级TMR传感器,并将其列为重点发展项目。除上述应用外,早在上世纪,NASA刘易斯研究中心就开始采用GMR技术,为ISS结构及关键部件进行无损探伤检测[16]。
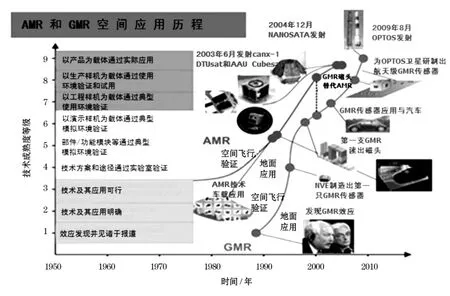
图1 MR传感器空间应用历程
总的来说,微型化磁电阻传感器作为新兴起的磁测量技术,与磁通门相比在地磁测量方面,稳定性和分辨率稍差,但是在重量、功耗及尺寸方面占据着绝对的优势,在航天器的微型化发展过程中有着无可替代的作用。
5 结语
就微型磁阻传感器的空间应用而言,空间磁场测量是其应用方向之一,当需要精确测绘某一区域的磁场和需要高空间分辨率时,阵列化的MR传感器更具优势,可轻易实现局部磁场的点测量,较磁通门更适合于空间磁场测绘;其次,微小卫星的姿态控制更适合采用微型磁阻传感器;最后,根据NASA经验,空间大型航天器结构及关键部件的无损探伤,深空探测任务将是今后微型磁阻传感器较有潜力的应用方向。
当然,新技术在空间的使用过程需要经过反复考验和测试,以保证其可靠性。在技术不成熟时,空间应用成本将十分昂贵,但是磁电阻传感器的发展及其竞争力已经展现出在小型化航天器中应用的良好势头。
[1]Watzin,J.A GSFC perspective on the execution of faster,better,cheaper[C].IEEE Proc.Aerospace Conf.Small Satel.1999;vol.2,pp.19 ~24;
[2]Mario H.Acuňa,Space-based magnetometers[J].Review of Scientific Instruments.2002;Vol.73,No.11,pp.3717 ~3719;
[3]U.S.National Institute of Stands and Technology.Magnetic Field Sensors Roadmap[R],2003;
[5]Jander,A.;Smith,C.;Schneider,R.Magnetoresistive Sensors for Nondestructive Evaluation(C).In Proc.10thSPIE Int.Symp.Nondestruct.Eval.Health Monit.Diag.,San Diego,California,USA 2005;
[6]Smith,C.H.;Schneider,R.W.Chip-size magnetic sensor arrays[J].Sensors EXPO 2002;
[7]Mateos,N.;Lobo,A.;Ramos-Castro,J.et al.Towards an improved magnetic diagnosis system for LISA[C].Poster presented in the 7thInternational Symposium,Barcelona,Spain,2008;
[8]Marina Diaz-Michelena.Small Magnetic Sensors for Space Applications[J].Sensors,2009,9;
[9]Makovec,K.L.;Turner,A.J.;Hall,C.D.Design and Implementation of a Nanosatellite Attitude Determination and Control System[C].In Proc.2001 AAS/AIAA Astrodynam.Specialists Conf.,Quebec City,Quebec,Canada,2001;
[10]Stras,L.N.;Kekez,D.D.;Wells,G.J.;et al.The Design and Operation of The Canadian Advanced Nanospace eXperiment(CanX-1).In Proc.AMSAT-NA 21st Space Symp.,Toronto,Canada,2003;pp.150-160;
[11]Wells,G.J.;Stras,L.N.;Jeans,T.;et al.D.G.Canada's Smallest Satellite:The Canadian Advanced Nanospace eXperiment(CanX-1).In Proc.16th Ann.AIAA/USU Conf.Small Satell.,Logan,Utah,2002;
[12]http://dtusat1.dtusat.dtu.dk/2008;
[13]http://www.cubesat.auc.dk/2008;
[14]Cerdn,M.F.;Michelena,D.;Arruego,I.NANOSAT-01:Three years of mission.Magnetic scientific results.Sens.Lett.2009;
[15]Michelena,D.M.;Oelschlgel,W.;Arruego,I.;et al.Magnetic giant magnetoresistance commercial off the shelf for space applications.J.Appl.Phys.2008,103,07E912;
[16]R.Ramesham;J.D.Olivas;S.Stokes;et al.Giant Magnetoresistive(GMR)Sensor Micro-electromechanical System(MEMS)Device for Nondestructive Evaluation(NDE)Health Monitoring Applications for International Space Station(ISS).
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
大电机技术(2022年2期)2022-06-05 07:28:34
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
传感器与微系统(2018年7期)2018-08-29 00:44:20
电测与仪表(2017年24期)2017-12-19 05:15:18
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42