美国海军航母及编队导航系统分析
2012-12-02 06:07:04郭隆华
舰船科学技术 2012年8期
宿 勇,郭隆华
(1.中国人民解放军海军装备部,北京100071;2.中国船舶重工集团公司 第七一四研究所,北京100192)
0 引 言
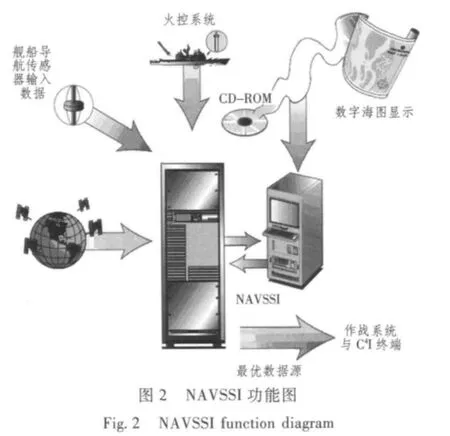
导航系统在航母及编队航行与作战过程中起到非常重要的作用,主要是保证航母及编队的安全航行、确保飞机的安全起降、对准舰载飞机惯性导航系统,并作为舰载情报信息系统与武器系统的基准信息源。美国海军航母和编队其他主战舰艇的导航系统组成基本相同,是以惯性导航系统(INS)为主,卫星导航系统(GPS)、多普勒计程仪、回声测深仪及电磁计程仪等导航系统为辅的组合导航系统。这些导航信息源通过导航传感器系统接口(NAVSSI)进行综合与处理,获取最优的、统一的导航信息,并将导航数据发送到各武器作战支持、指挥控制、计算机、通信、情报、监视、侦察系统和其他信息系统。航母与编队其他主战舰艇导航系统相比,NAVSSI 将导航数据传输给不同的用户,航母上的NAVSSI 需要将导航信息发送给舰载机起降的相关辅助系统。
1 导航传感器系统接口
NAVSSI 是航母及编队导航系统的核心,其能综合来自各种导航传感器的数据,形成精确的导航数据、时间数据等,分发给航母及编队舰艇的作战指挥系统、探测系统、航空保障系统、航行保障系统、通信系统、武器系统及训练系统等。
NAVSSI 的主要功能和特征如下:
1)集成了包括GPS 和惯性导航的多种导航信息源;
2)能在干扰严重的环境中保持高精度;
3)提供一种通常可参考舰船导航方案;
4)提供超过99.9%的作战有效性;
5)利用民用现成技术(COTS)降低系统成本;
6)支持海军无纸化导航;
7)提供比GPS 更精确和可靠的性能;
8)适应国防信息基础设施通用作战环境(DII COE);
9)满足全球海上指挥与控制系统(GCCS-M)标准;
10)使用部门联合开发的指挥显示与控制——惯性导航系统(COMDAC-INS)软件部分;
11)使用国家图像与测绘局(NIMA)的数据;
12)满足软件工程机构性能成熟度模型标准;
13)提供惯性、卫星、多普勒声呐组合导航的最优滤波,确定最佳位置。
1.1 发展历程
NAVSSI 是1991年2月由美国空海作战系统司令部着手实施的,是为了处理战斗群之间各种导航数据,形成统一的导航数据发送。由于民用电子海图与信息系统(ECDIS)的飞速发展,1998年,美国海军决定将电子海图与信息系统应用于海军。NAVSSI 不仅包括了海军电子海图显示与信息系统(ECDIS-N)的功能,还增加了许多防御任务功能。
到目前为止,NAVSSI 已经从Block 0 发展到Block 4,经过了5 个发展阶段。Block 4.2.1 是最新的版本。NAVSSI 的设计在操作方法上非常灵活,可对输出数据进行选择,对惯性导航系统重调用定位源进行选择,可对数据合理性进行监视选择等。NAVSSI 系统采用开放式设计,可适应技术的不断发展,植入新的技术。未来,美国海军计划开发GPS定位、导航与授时系统(G-PNTS),来取代NAVSSI系统,G-PNTS 与NAVSSI 的内部都嵌入了下一代卡式GPS 接收机,确保美国海军舰船能接收来自改进型GPS 卫星的信号。
1.2 系统构成
NAVSSI Block 4 系统主要由实时子系统(RTS)、显示控制子系统(DCS)及远程工作站(NRS)3 个部分组成。
实时子系统负责收集、处理及分发定位、导航、授时(PNT)数据,采用1 套导航数据源综合(NSI)算法将多个传感器的数据融合,包括GPS 数据和惯性导航数据,来形成高精度和有效的导航方案。所有NAVSSI Block 4 系统都包括2 套实时子系统,这2 套实时子系统通过反射内存(即多台计算机形成全局共享内存互联的高速网络,每个节点都把全局内存视为本地内存)进行数据交换,每套实时子系统可以共享所有的源数据。如果1 条通信信道对实时子系统失效,实时子系统还可以通过反射内存从其他实时子系统获取信息。

显示控制子系统通过局域网与每套实时子系统进行通信。显示控制子系统为实时子系统提供操作人员接口以及电子海图和雷达接口。显示控制子系统能利用导航工具包显示实时子系统的传感器信息,计程仪导航数据,电子海图及雷达图像,并能控制实时子系统。
远程工作站是NAVSSI 操作人员的远程显示器。NAVSSI 远程工作站为舰桥及其他舱室的人员提供全部的控制与显示能力。操作过程中,NAVSSI 持续监视各种导航数据源的输入数据,确保数据的完整性。
1.3 主要功能
NAVSSI 的功能主要包括定位、导航、授时、舰载机惯性导航系统对准等。
1)定位
美国海军舰船采用了多个参考基点,如武器系统、雷达、惯性导航系统、平台罗经、GPS、舰桥。在大型舰船上,由于船体变形和使用的参考系不同,相互之间的差别可达近百米。随着射击解算要求越来越精确,对于总的误差估计,这些误差就变得更加重要。建立统一的基准位置数据已成为迫切解决的问题。该方案将在舰船上挑选一个独立的点,作为所有舰载系统的参考点,即本舰参考点(OSRP)。这简化了本舰参考点定位、导航与授时数据与其他终端用户之间的转换。通常情况下,本舰参考点应与位于舰船中心线中部的水线位置的舰船自转中心重合。
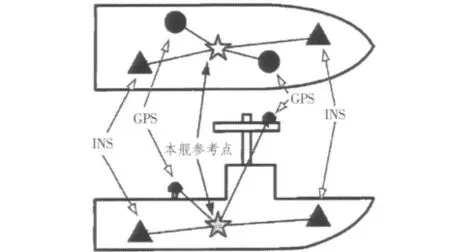
图3 本舰参考点杆臂向量Fig.3 Own ships reference point(OSRP)lever arms
2)导航
NAVSSI 的主要功能是向舰船武器与作战系统提供位置与时间信息,其次是向舰船舰桥提供导航方案,即将舰船的位置数据标绘在舰桥、海图室及其他舰上操控场所的电子海图上,可与综合舰桥进行组合,实现避碰、航行计划和舰船操纵自动化。为了在任何情况下向用户提供有效的导航数据,NAVSSI 采用优先级的方式进行导航数据源选择。数据源选择方案考虑了所有可提供导航数据的传感器,并为每个传感器设置了优先级,包括位置、速度、加速度、航向、姿态、深度、风速等。如果任何传感器未通过数据审查,传输了无效数据,或传输失败,NAVSSI 自动地采用传感器可提供的下一批次的数据。
3)授时
为了完全共享作战航迹数据,以时间为标签的数据的时间误差必须足够小。GPS 可以在全球提供可靠的、精确的供导航系统使用的无故障时间信息。但是,GPS 战时有可能受到干扰,无法满足导航小组对可靠的精确时间的需求。因此,NAVSSI 开发了一种精确授时装置(PTU)。
精确授时装置包括频率调整模块(FDM)、铷振荡器以及缓冲输出设备。一旦估计的时间误差(ETE)超过100 ns,精确授时装置将进入工作模式,并利用铷振荡器来保持时间精度。对于大多数用户,1 ms 的精度能满足需求。这意味着精确授时装置能在GPS 无法使用的情况下,在5 个半月的时间里满足这些用户的时间需求。
4)舰载机惯性导航系统对准
航母舰载机惯性导航系统对准是航母导航系统的重要功能。舰载机惯性导航系统在飞机起飞前需要进行对准,也即利用航母导航系统的姿态和位置进行初始化的过程。舰载机惯性导航系统的对准主要利用惯性导航系统的数据,最初采用硬连接系统,舰船惯性导航系统的数据经舰载机惯性系统对准控制台(SAISAC),到甲板出口箱,再经转换箱到相对速度计算机箱,最后到飞机惯性导航系统。引入NAVSSI 以后,由于NAVSSI 能获得GPS 数据,实现了数字化,可以利用LINK-4A 数据链方便地实现对准。其中,LINK-4A 数据链为单向或双向通信系统,可向100 架飞机发送信息。
2 美国航母及编队导航系统的数据流程
航母及编队导航系统的数据流程主要包括接收数据源数据、数据检查、数据处理、导航数据输出等。

图4 NAVSSI 数据流程图Fig.4 NAVSSI data flow chart
2.1 导航系统主要数据源
美国航母及编队中NAVSSI 的数据源主要包括惯性导航系统、多普勒计程仪、卫星导航系统、回声测深仪、电磁计程仪、陀螺罗经、风速仪及时间数据等。

表1 NAVSSI 的主要数据源Tab.1 NAVSSI main data source
2.2 数据检查
NAVSSI 持续监视导航数据源的输入数据,并确保数据的完整性。完整性检查主要是确保通过物理介质连接NAVSSI 数据源,并接收合适的数据。如果出现不完整信息、信息中含错误内容等情况,NAVSSI 将向操作人员发出可视的报警信号。
NAVSSI 能提供导航数据有效性监控,包括对每个位置数据源误差特性的持续监控。如果数据源误差特性持续超过一定数值,该数据源即认为是无效的。数据源综合算法将不采用该数据,NAVSSI 向操作人员发出可视的报警信号。如果NAVSSI 操作人员手动选择了一个超出误差范围的数据源,NAVSSI也将显示报警信息。
2.3 导航数据综合处理
NAVSSI 提供一种导航数据源综合算法,该算法将来自GPS 的数据与惯性导航系统数据综合,形成一种高精度、可靠的导航方案。导航数据源综合算法充分考虑了每个导航传感器的误差特性,将满足表1 中舰上用户的精度需求。
位置数据。主要是利用来自1 台或2 台GPS 接收机和1 套或2 套惯性导航系统的位置数据综合计算得出。该综合位置数据利用最优的惯性导航系统数据以插值的方式推算得出。该方法能为用户提供精确的位置信息。当GPS 不可用时,NAVSSI 的精度与惯性导航系统精度相同。其中,最优的惯性导航系统是指一段时间内输出的位置信息最接近GPS 位置信息的惯性导航系统。数据源位置综合算法使NAVSSI 在正常工作的情况下提供精度为12 m 的位置参考信息。
速度数据。通过对最优惯性导航系统与GPS 之间的速度误差进行滤波来计算速度值。惯性导航系统速度经过估计的误差校正后用于导航数据源综合计算。
姿态数据。姿态与姿态变化率不需要计算,直接采用最优惯性导航系统的数据。如果惯性导航系统失效,姿态数据就是无效的。当实时子系统接收到新的姿态数据时,将对新接收的数据进行多项式匹配。这种匹配将用于推算姿态数据并根据最新的惯性导航系统姿态数据时间点计算姿态变化率信息。利用这种匹配方式及外推算法,NAVSSI 能保证姿态数据的精度。
导航数据源综合算法能估计出NAVSSI 输出的数据的精度。该精度估计基于传感器系统已知的误差特性。某些用户系统将精度估计数据作为数据信息的一部分进行发送。对于其他用户,这些精度估计数据将用于设定数据的有效位数。
2.4 导航数据输出
NAVSSI 的实时子系统以多种形式输出导航与时间数据,接收NAVSSI 导航数据的舰载用户有数十个。表2 给出了NAVSSI 实时子系统输出导航数据的主要接收用户及精度需求,这些数据包括了航母及编队其他主战水面舰艇上的主要系统用户。

表2 NAVSSI Block 4 输出的主要导航数据Tab.2 NAVSSI Block 4′s main output navigation data

(续表1)
3 美国航母及编队导航系统的信息安全
最初,NAVSSI 是一套独立的系统,其子系统通过内部局域网连接,实时子系统通过外部点对点接口与传感器及用户连接。这种独立的配置不存在信息安全问题,但是随着接口数量的增长,将与其他网络用户交叉,因此需要考虑信息安全问题。以美国LPD-17 级两栖攻击舰为例,当其NAVSSI 需要通过卫星通信与外界联系时就出现了信息安全问题,另外同时与非密网与涉密网连接也将产生跨界信息安全问题。
1)通过卫星通信与外界联系
LPD-17 的非密舰载广域网(SWAN)通过卫星通信与非密互联网路由器网络(NIPRNET)连接,非密互联网路由器网络通过边界安全方法进行安全防护。然而,这些措施并非100%安全,因此当非密的舰载广域网出现漏洞时,NAVSSI 需要受到安全保护。NAVSSI 安全方案包括软件与硬件方案。
定位、导航与授时数据如果出现延迟将是无意义的,因此不需要转发任何损坏的或错误的数据,也不需要进行双向通信。这将使NAVSSI 向非密舰船广域网单向多点传输数据,而不需要接收任何数据。通过硬件实现利用绝对安全的单向光纤输出数据,这种软件方案将变得更加安全。这种软件与硬件的组合方案确保NAVSSI 能防止任何来自非密舰船广域网的访问。
2)跨界通信问题
LPD-17 需要NAVSSI 向涉密的舰船广域网提供导航信息。类似的单向光纤方案也用于这种接口方案,这能确保涉密数据不会进入NAVSSI。然而,NAVSSI 作为非密系统将向秘密的舰载广域网提供定位、导航与授时数据,这将产生非计划的跨界传输问题。美国海军允许非密的定位、导航与授时数据提供给涉密系统,此外还可以进行物理连接。
涉密的舰船广域网的风险可能来自与NAVSSI连接的非密系统。如果该非密系统能通过单向通信路径访问秘密的舰船广域网,就可能植入“特洛伊木马”病毒或其他类型的恶意代码。为防止任何产生途经NAVSSI 的跨界通道的可能,涉密舰船广域网的接口直接与实时子系统连接,实时子系统不提供任何转移、传输数据的权限,以及对其他接口产生数据通道的权限。实时子系统包括一种独立的可执行程序,嵌入子系统硬件中,无法进行修改,或运行其他程序。实时子系统没有外围存储设备和分配内存权限,所以无法存储任何植入的数据,也不存在有效的接口信息。这确保了任何数据无法从一个接口传输到另一接口。所有输入到实时子系统的数据以固定的格式进行处理。这种数据随后用于以适当的输出格式构建新的输出数据,这也消除了数据从一个接口转移到另一个接口,从而产生跨界通信信道的可能性。
4 结 语
NAVSSI 是目前美国海军水面舰艇广泛采用的定位、导航与授时方案,能解决大型水面舰艇多个位置的杆臂效应问题、GPS 信号受到干扰时的授时问题等。NAVSSI 方案将航母编队内的定位、导航与授时数据完全统一,是航母编队进行航行与作战的重要保障。
[1]MURPHY S P.An integrated approach to US navy Shipboard Navigation[J].IEEE,2004.
[2]SHAW P T.An integrated approach to electronic navigation[J].IEEE,2000.
[3]SHAW P T,et al.Integrated and distributed position navigation and timing (PNT ) data in shipboard environments[J].IEEE,2004.
[4]PETTUS W R,et al.Formulating an improved integrated navigation solution for US navy surface ships[J].IEEE,1998.
[5]Space and Naval Warfare Systems Center.Navigation sensor system interface,integrated navigation[R].AD report,1998.
[6]CAPT D G.US navy progress in electronic navigation[J].IEEE,2002.
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
计算机与生活(2018年3期)2018-03-12 08:38:11
中国科技期刊研究(2017年2期)2017-05-14 06:16:26
电气化铁道(2016年6期)2016-05-17 03:42:54
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
浙江大学学报(工学版)(2015年2期)2015-05-30 07:05:04
测绘科学与工程(2014年6期)2014-02-27 07:06:19
土木建筑工程信息技术(2013年4期)2013-10-17 02:27:54
电脑与电信(2011年6期)2011-08-08 12:47:58