
GPS/INS深组合技术探讨
2012-12-02 06:15:42冯海艳刘正兴
教练机 2012年1期
董 斌,冯海艳,刘正兴
(洪都航空工业集团, 江西 南昌330024)
0 引言
导航技术是一项涉及多学科交叉的应用技术,在军用领域和民用领域均有着广泛的应用前景。 随着现代战争的发展, 面对未来高速和超高速武器的需求和战场复杂的电磁环境, 导航系统需要能稳定的应对更高的载体动态环境和无处不在电子干扰环境。 纵观近来的几场局部战争,现代战场精确制导武器精确打击的前提条件是导航系统需能在高速和复杂电磁环境下稳定可靠工作并提供精确的位置和速度信息,因此,对导航系统在高动态和日益复杂电磁环境下的可靠性和可用性提出了更高要求。
1 GPS/INS 组合导航技术介绍
惯性导航系统 (INS—Inertial Navigation System)INS 和GPS(GPS—Global Positioning System)[1]有着各自的特点与优点, 同时也具有各自的缺陷和不足。INS 是不依赖于外部电磁信号,也不发射电磁信号的全自主式导航系统,隐蔽性好,具有良好的抗干扰性能,完全独立自主地提供位置、速度、姿态等多种较高精度导航参数,然而,它的系统精度主要取决于惯性测量器件,导航参数的误差随时间不断积累,无法满足高精度要求;GPS 是以卫星为基础的全球无线电导航定位系统,能够为用户提供全天候、全时间、连续的精确的三维位置、速度、时间信息,但是,当GPS的载体在高动态和复杂电磁环境下时, 常使GPS 接收机不易捕获和跟踪卫星载波信号, 甚至产生失锁现象。 此外, 由于GPS 接收机输出数据率相对比较低,因此,单一GPS 系统不能满足武器系统对导航信息的要求。为了实现GPS 和INS 优缺点高度互补,人们提出将GPS 和INS 系统进行组合, 利用信息融合技术对组合系统的数据进行处理, 使之能充分发挥二者的优点,提高整个导航系统的性能。 组合导航系统自提出以来,经历了三个阶段的发展,按组合导航技术发展先后顺序和组合导航系统信息交换的程度依次为松性组合、紧性组合和超紧组合,其中超紧组合又称为深性组合(简称深组合)[2]。 松性组合,核心思想就是利用GPS 和INS 导航输出的位置、 速度的误差进行建模并进行数据融合滤波,估计其误差量,用其对INS 导航输出的位置和速度进行误差修正,提高导航精度。松性组合在一定程度上提高了组合系统的性能, 但是松性组合数据融合采用导航输出值,其数值之间存在一定的相关性,而一般的数据融合采用的Kalman 滤波建模均为输入数据不相关, 因此存在一定模型误差。 为了克服松性组合的这个弱点,人们进一步采用伪距、伪距率等原始采样值进行数据融合并估计出INS 的误差参数和导航误差,对INS 的误差参数进行修正,并进一步修正其导航输出值,这就是紧性组合,也称紧组合。 由于紧性组合中伪距、伪距率数据原始采样值,数值之间互不相关,因此性能较松性组合有所提高,同时提高了卫星的利用率。
松性组合、 紧性组合这两种组合导航系统均采用GPS 辅助INS 的方式, 提高了INS 导航输出的精度,而GPS 并没有获得任何辅助,因此虽然整个系统的性能有所提高, 但是GPS 接收机的性能并没有得到改善。 若GPS 接收机在高动态或者低信噪比等恶劣环境中会出现不能有效跟踪卫星信号的情况,组合导航系统又回到INS 纯惯性导航, 因此这两种组合方式并不能从根本上提高整个系统的可用性和可靠性。 针对上文所述松性组合和紧性组合的共同弱点,人们提出了采用INS 数据对GPS 进行辅助,这就是深组合。 深组合技术在原先GPS 接收机辅助INS的基础上, 提出利用INS 数据对GPS 接收机进行辅助, 即一方面利用GPS 和INS 的导航数据进行组合滤波,对INS 的各种误差量进行辅助修正,减小其导航误差; 另一方面,INS 利用自身测得的载体位置和速度信息对GPS 载波跟踪环路进行辅助, 从外部剔除接收到的卫星信号中由于载体和卫星之间相对运动所引起的动态, 使得GPS 接收机在高动态环境下可稳定工作, 并可进一步压缩接收机载波跟踪环路带宽,抑制噪声,提高系统的抗干扰性能。 鉴于深组合系统具有如此优越的性能,GPS/INS 深组合技术已成为下一代高速精确制导武器的核心技术之一,并成为国内外各大机构和院校研究的新热点。
2 GPS/INS 深组合技术原理与实现
2.1 GPS/INS 深组合技术原理
GPS 接收机按其内部工作流程的顺序,通常分为射频前端处理、 基带数字信号处理和定位导航运算三大功能模块。 射频前端处理模块通过天线接收所有可见GPS 卫星的信号, 经前置滤波器和放大器的滤波放大后, 再与本机振荡器产生的正弦本振信号进行混频下变频为中频信号, 经模数转换器转变成离散的数字中频信号; 中频信号进入基带数字信号处理模块,完成对卫星信号的捕获、跟踪、位同步、帧同步等信号的处理, 并将处理后GPS 数据和导航电文送给定位导航运算模块进行导航参数的处理。 深组合技术与传统的组合导航方式相比, 增加了惯导数据对GPS 卫星接收机的辅助, 而由于载波环是GPS 接收机跟踪环路最脆弱的环节,一般只要载波环不失锁,则码环不会失锁,因此INS 提供的信息只对载波环进行辅助,通过载波环对码环进行辅助。 其原理图见图1。 在GPS/INS 深组合系统中,接收机进行载波跟踪的同时, 接收机还将利用INS 测得的载体动态信息和由卫星星历计算出来的卫星动态信息计算出卫星信号中由于两者相对运动所引起的多普勒频率,并从外部对接收机载波环进行辅助,如果外部多普勒频率估算完全准确, 则接收到的信号中由于载体与卫星之间相对运动所引起的多普勒频率动态将会消除, 此时载波跟踪环所需要跟踪的动态就只有接收机本地晶振的频率动态和热噪声, 这个动态通常很小,因此接收机能在高动态环境下稳定工作。此外, 由于需要接收机载波跟踪环路跟踪的动态很小,还可进一步压缩载波跟踪环路带宽,抑制噪声,延长预检测积分时间,增强信号强度和信噪比,提高接收机抗干扰性能。 因此深组合技术能使GPS 接收机在高动态和低信噪比同时存在的环境下稳定工作,输出精确的导航定位信息。
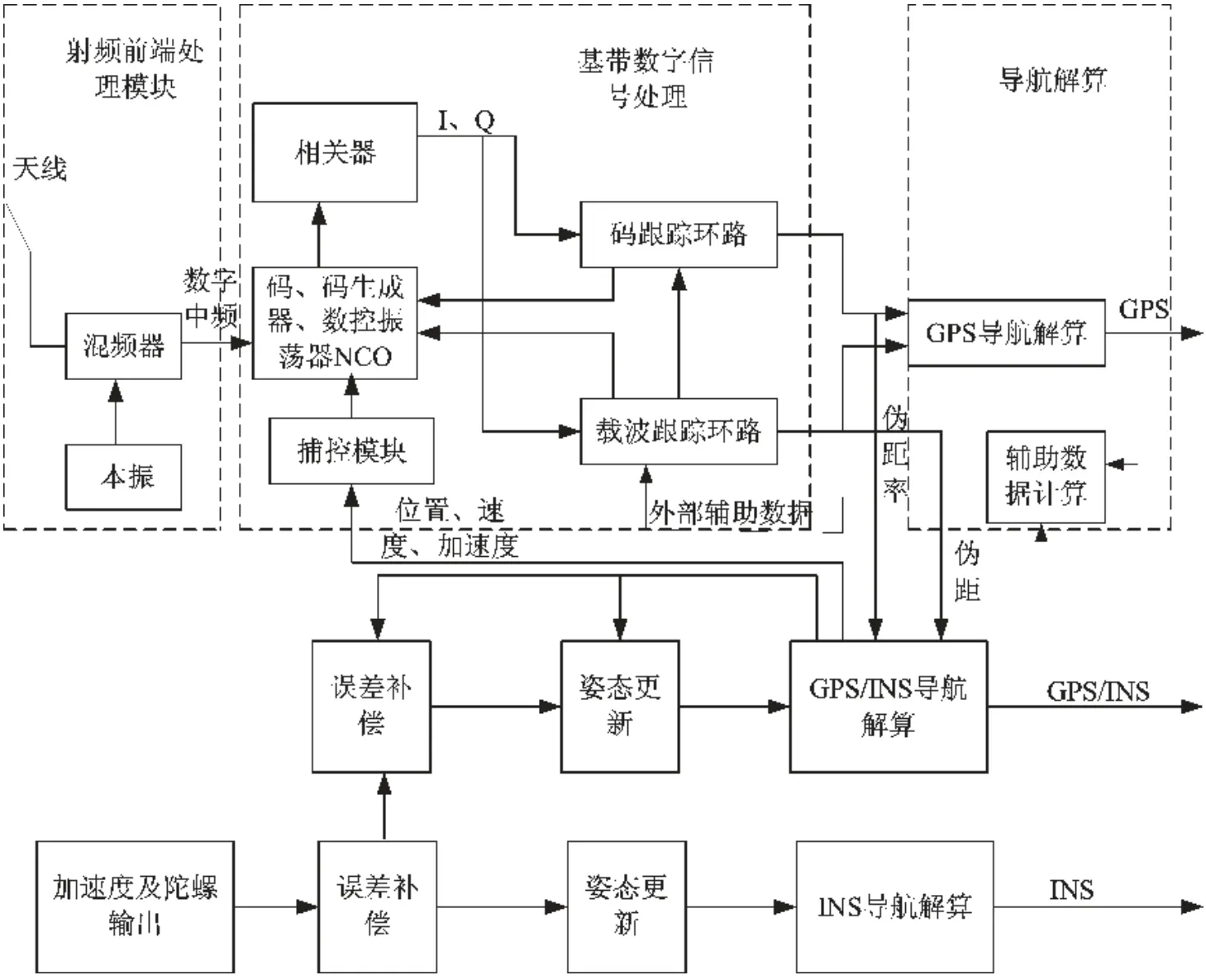
图1 GPS/INS 深组合技术原理图
2.2 GPS/INS 深组合技术工程实现
图2 为工程上深组合技术中GPS 跟踪环路的具体实现原理图, 图2 中外部多普勒频率辅助信息是根据外部INS 提供的载体动态信息进行估算的,当开关K 打到2 时, 外部频率辅助将会通过前馈的方式注入环路中对载波跟踪进行辅助, 能剔除信号中的绝大多数动态,使接收机在高动态下能稳定工作。在实际GPS/INS 深组合系统中, 由于INS 只能提供载体的动态信息,为计算外部辅助多普勒频率,还需要卫星的动态信息, 因此在进行外部频率辅助之前GPS 需能接收卫星星历,即在进行外部频率辅助之前接收机需能独立工作,捕获并跟踪GPS 信号,接收导航电文,解调卫星星历,计算出卫星动态信息,若此时接收到有效的INS 辅助数据, 则在外部计算出多普勒频率并将其注入载波跟踪环进行环路辅助。 由于辅助前后接收机载波跟踪环所需跟踪的动态大不相同,因此所需的环路带宽也不一样。 辅助之前,信号中的动态完全由载波跟踪环路跟踪, 所需环路带宽较宽;辅助之后,由于信号中的动态被外部辅助有效剔除,此时跟踪环路需要跟踪的动态将大为减小,环路带宽可大为压缩,一方面可抑制噪声,提高测量精度, 另一方面还可为弱信号跟踪技术中积分时间延长提供条件, 因此深组合系统中由传统跟踪模式到辅助环路跟踪模式之间存在环路切换过程。如图2中所示,在未进行辅助时,开关K 指向1,GPS 接收机载波跟踪环将通过环路滤波器1 这一通道进行环路滤波,该通道中的滤波器环路带宽较宽,能有效应对高动态应力, 使接收机不受辅助也能稳定跟踪GPS信号。 在接收机接收到卫星星历并计算出卫星动态信息后, 利用INS 提供的载体位置、 速度等动态信息,从外部估算出多普勒频率并将其注入环路中,此时信号中的动态将基本被消除, 载波跟踪环路所需要跟踪的动态大为减小, 此时可以压缩环路带宽,因此可将开关K 将打到通道2 上。 由于通道2 中的环路滤波器2 的带宽比环路滤波器1 小很多,可以有效抑制噪声和干扰,提高接收机的测量精度。
3 深组合技术理论分析
GPS/INS 深组合技术核心思想在于利用INS 测得的载体动态和由卫星星历计算出的卫星动态,估算出由于载体与卫星之间相对运动所引起的多普勒频移,对GPS 载波跟踪环路进行外部辅助,剔除信号中的多普勒频率动态。 由于载波相位的导数即为多普勒频率,若外部估算的多普勒频率完全准确,则将与其值相同, 由此结合实际情况, 经过添加相关误差, 我们给出了INS 辅助GPS 载波跟踪环路的域数学模型[3],如图3 所示。
图3 中φr(s)、φo(s)与δφ(s)分别表示锁相环的输入相位、输出相位与相位误差,fexl(s)是外部频率辅助,δfext(s)与wn(s)分别表示外部辅助频率误差与热噪声误差,F(s)代表环路滤波函数,kp 是鉴相增益,p是整个环路的增益,k=2πkpknco,kNCO=2πknco是数控振荡器NCO 增益,knco=fx/2N,其中N 是NCO 的计数器位数,fs是采样频率,α 是INS 辅助数据的带宽,一般较大,e-sτ为辅助时间延迟模型,τ 则是外部辅助信息采样时刻相对于辅助时刻的时间延迟,其值τ>0。
为了更清晰的认识GPS/INS 深组合技术的优势,理论分析先不考虑各种误差,可认为:τ=0,δfext(s)=0,wn(s)=0,由此并根据深组合数学模型可以推导出:
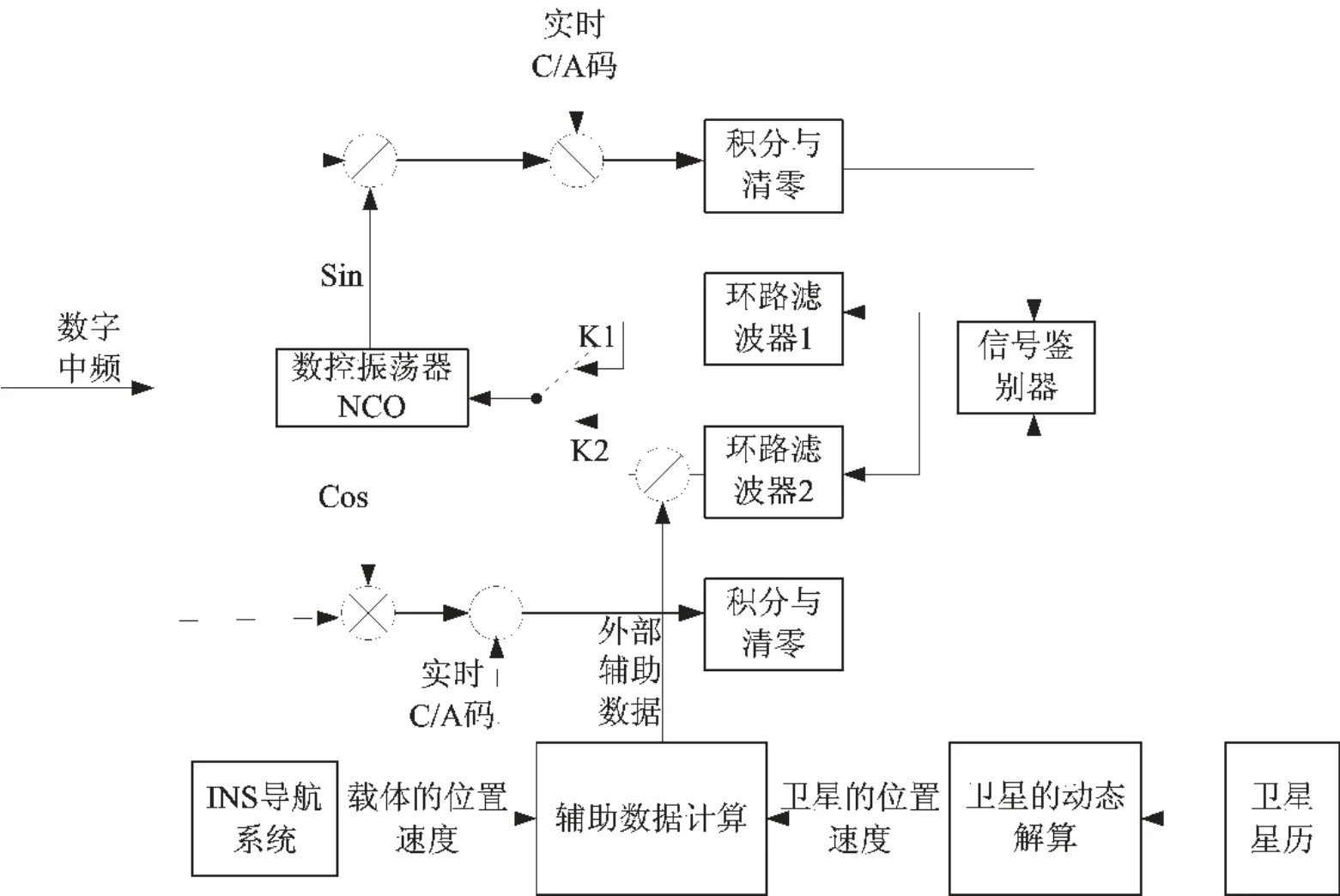
图2 GPS/INS 深组合载波跟踪环路辅助原理图
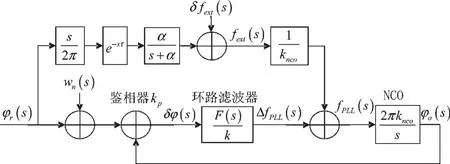
图3 GPS/INS 深组合技术数学模型

即:

从式(1)、(2)可以看出,在INS 辅助GPS 载波跟踪环深组合系统中,若辅助数据完全准确,则锁相环的输出信号相位将准确体现输入信号相位, 不存在任何相位误差,实现信号相位的完美跟踪。 这种特点能使得锁相环在任何动态环境下都能保持载波跟踪环路相位锁定, 使GPS 接收机对卫星信号的跟踪变得更加稳定可靠, 大大提高了接收机的可用性和可靠性,这也是GPS/INS 深组合技术的核心思想,即无论载体经历多高的动态, 接收机都能稳定跟踪上卫星信号中的相位变化,使接收机保持稳定工作。
4 深组合技术组合导航系统的性能验证
深组合技术理论分析时, 没有考虑各种误差的影响,但是在实际的GPS/INS 深组合系统中,必然存在很多误差,比如外部辅助数据时间延迟、辅助信息可能存在误差等, 这些误差对GPS 跟踪环路相位误差均有一定的影响。 为了分析实际工程中深组合对导航系统带来的优点,进行了实物的性能测量。
4.1 深组合技术抗干扰性能仿真试验
采用具备深组合功能的抗干扰卫星导航接收装置在试验室仿真环境下进行测试。 运用在接收机接收卫星信号通路上耦合干扰信号的方法分别在静态和动态模式下测试了接收机的抗干扰性能,通过不断增加干扰信号功率, 直到接收机不能接收卫星信号,并通过软件控制对比在有无深组合情况下接收机能加到的最大干扰功率,得出深组合的抗干扰能力。
试验结果表明, 在静态和动态模式下采用深组合技术能使卫星导航接收装置的抗干扰性能明显提高。
4.2 深组合技术组合导航精度测试
深组合技术对INS 带来的影响主要涉及到不少于4 颗卫星的组合精度和少于4 颗卫星的组合精度。 搭建深组合系统仿真平台, 对设计的深组合系统进行了组合算法测试, 测试结果如图4 所示。 在不少于4 颗卫星情况下, 组合精度位置误差在10 m以内,速度误差在0.1 m/s 以内;在3 颗可用卫星情况下,位置误差在50 m 以内,速度误差为0.2 m/s。

图4 深组合系统组合算法测试结果
动态情况下的测试, 是考核深组合性能手段,由于采用大量的飞行测试成本很高而且也不现实,因此一般采取地面跑车试验。
5 结语
本文以GPS/INS 重点介绍了深组合技术的原理和工程实现, 同时进行了理论分析, 并经过实物仿真验证,测试结果显示,在静态和动态模式下采用深组合技术能使卫星导航接收装置的抗干扰性能明显提高,在不少于4 颗卫星的情况下,组合精度位置误差在10 m以内, 速度误差在0.1 m/s 以内; 在3 颗可用卫星情况下,位置误差在50 m 以内,速度误差为0.2 m/s。
[1]张天光等译, 捷联惯性导航系统 (第二版),北京:国防工业出版社,2007.
[2]Elliott D.Kaplan 著, 寇艳红译,GPS 原理与应用(第二版),北京:电子工业出版社,2007.
[3]Ronald E. Best. Phase-Locked Loops: Design,Simulation,and Applications,Sixth Edition.The McGraw-Hill Companies,2004.
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
上海公路(2018年4期)2018-03-21 05:57:46
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
西部广播电视(2015年10期)2016-01-18 04:01:45
电测与仪表(2014年15期)2014-04-04 12:05:32
电测与仪表(2014年8期)2014-04-04 09:19:36
现代防御技术(2014年6期)2014-02-28 18:26:27
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:50
