卫星定位接收机用棒状单极子天线
2012-12-01 02:11于利军牛家萍杜英森刘剑霏
探测与控制学报 2012年5期
于利军,牛家萍,杜英森,刘剑霏
(西安机电信息技术研究所,陕西 西安 710065)
0 引言
GPS是全球定位系统的简称。通过地面GPS接收机接收不同卫星的数据,来获得位置信息。基于GPS简易制导的低成本精确打击弹药越来越受到战场青睐,美国的“GIF”、“PGK”等弹道修正引信即为典型[1]。
国内已展开弹药用GPS接收机的应用研究,在火箭弹、导弹等微旋、低动态条件下取得了成功[2]。但在高旋转弹药平台中,虽然很多单位均提出是天线相位中心导致了GPS接收机无法正常接收,但关于多普勒频率跳变的分析很少,只是从提高天线增益方面着手(如自适应方式、天线阵列方案等),成本高、体积大、构成复杂、相位中心难以控制。
本文提出了消除高转速条件下GPS接收机多普勒频率跳变的单天线方案。
1 天线相位中心对GPS接收机多普勒频率影响
天线相位方向图相对于某点为一常量,则该点定义为天线相位中心[3]。为进一步了解天线相位中心,以下分析基于该理论:任何天线的波瓣图都可认为是由点源阵产生的[4]。
影响天线相位中心的因素是:天线阵列对称性以及旋转中心。对于高转速弹丸,旋转中心为弹轴,则需要天线中心与旋转中心重合,对于远场的卫星来说,也就意味着相位中心与旋转中心重合。
在GPS测量中,观测值都是以接收机天线的相位中心为基准。卫星与GPS接收机之间存在相对速度,实际上是与天线相位中心的相对速度。
弹丸在飞行过程中,相对于卫星,位置的变化对应的是速度变化,速度变化就会引起多普勒频率变化。一是弹轴方向上的速度分量VL,二是弹丸旋转引起天线相对中心对卫星的速度VC。假设弹丸飞行方向与弹轴重合,求最大多普勒频移,可以假设卫星与弹丸的速度方向都在弹道平面内。
以典型弹道为例:分析VC,由于弹丸旋转,假设接收机天线相位中心恰好在弹轴上,VC为0。
如果天线相位中心不在弹轴上,偏离弹轴距离为r,相位中心随着弹丸进行高速旋转,转速为γ(r/s),以弹道平面向上为旋转初始零点,在t时刻,弹丸转过的角度为θ,相位中心对卫星的速度为707±600πr×0.707≈707±1 332 r。在弹丸一个转动周期内,相对卫星速率变化值为1 503~1 769m/s,多普勒频率在7.9~9.3kHz内变化。在C/A码上产生的多普勒频移约为6Hz,这个值在码跟踪环路里非常重要,在环路中不加以修正,会导致码跟踪环路失效。
同时,多普勒频率的变化率对数据跟踪来说也是非常重要的信息,计算出多普勒频率的变化速率,就可以预测在跟踪时的频率修正率。一种方式是找出多普勒频率变化的最大速率。对卫星相对地面速率vd求时间导数:

当φ=π/2时,得到速度的最大变化速率为0.178m/s2,相应的多普勒最大变化速率为0.936 Hz/s。
频率测量精度在1Hz量级,在最大多普勒频率变化率时,修正速率大约1s。而GPS接收机在弹丸增程阶段,加速度假设为10 g,多普勒频率的最大变化率约为847Hz/s。当GPS接收机跟踪GPS信号时,跟踪环路状态的改变有两个因素:载频的变化以及输入码和本地C/A码之间的对准。由于在C/A码上产生的多普勒频移,输入数据的调整速率大约20ms。如果载波跟踪环的带宽在1Hz量级,接收机的加速度为10 g,由于载频的变化,跟踪环必须大约每2ms更新一次,这对于GPS接收机是很难实现的。
所以,在高速旋转条件下,天线相位中心相对于卫星的位置发生快速变化,导致多普勒频率跳变,使GPS接收机失锁。若要消除多普勒频率的跳变,必须清楚影响天线相位中心的因素。按照天线组成形式,可以分为单天线和阵列天线。
弹载阵列天线馈电方式分为内馈式和外馈式。
内馈式将馈电网络与天线单元分开,安装在弹体内,通过馈线与天线连接。在这种情况下,由于馈线长度、焊点位置不同,导致各个单元相位不同。对于远场的卫星而言,在高速旋转条件下,作为点源的GPS接收机与卫星之间的距离由于相位不同而发生变化,也就是天线相位中心随着弹体旋转发生了位置上的变化[5]。
外馈式天线阵列将馈电网络与天线单元一起设计,均安装在弹体外壁。这种方式能够确保各个天线单元相对于馈电点相位相同,但难以保证各个天线馈点所在的平面与弹体垂直,那么在高速旋转条件下,与内馈式阵列天线相同,天线相位中心随着弹体旋转会发生位置上的变化[6]。
可见无论是哪种馈电方式,阵列天线均难以满足高速旋转条件下天线相位中心不变的要求。
2 棒状单极子天线及其相位中心
单极子天线也称为垂直于导电平面的天线,典型的单极子天线有T形,棒状,鞭状形等。其特性是采用一个天线单元实现接收天线功能。
GPS接收机天线安装于引信头部。考虑强度及外形尺寸,采用棒状单极子天线,见图1。
将单天线看作为点源,见图2。以坐标原点为参考相位,则远场某点处来自于点源的场相位为2πr/λ,其中λ是波长。由此可以得到,距离点源相同距离的远场,相位均相同,而与位置无关。
对于各向同性的点源,以其自身对称轴进行旋转,则方向图为一球形。
所以,对于单极子天线,只要其旋转轴为方向图对称轴,那么对于远场,只要距离相同,其相位也相同。其相位中心在其旋转轴上,对于远场的点源而言,当天线发生旋转时,相位并不随着旋转而改变。
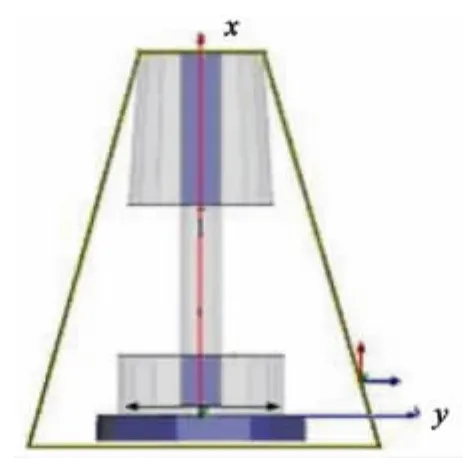
图1 棒状单极子天线Fig.1 Stick-monopole antenna
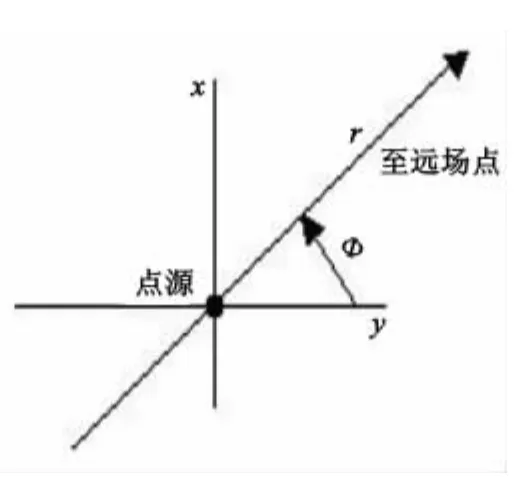
图2 单天线远场示意图Fig.2 The far-field of single antenna
棒状单极子天线容易实现安装对称性,保证天线中心与旋转中心基本重合[7]。目前GPS接收机天线大多都为圆极化以防止多径影响。由于弹丸处于高空,可不考虑多径的影响。单天线设计为线极化,极化失配可由低噪放进行弥补。
方向图设计见图3。其中,x轴为弹轴,x轴方向为弹头方向。1/2功率波瓣角为90°,1/4功率波瓣角约120°。
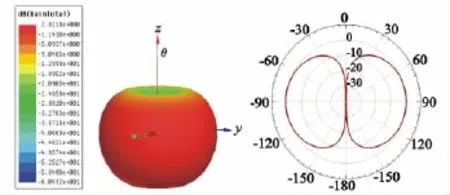
图3 GPS接收机天线理论方向图Fig.3 The theoretic antenna pattern of GPS receiver
当弹体垂直向上或者垂直向下时,四周无遮挡条件下,天线1/4功率波瓣角可覆盖1/2空域,可接收四周低仰角卫星数据。当弹体倾斜45°时,天线向上一侧波瓣角能够覆盖约2/5的空域,向下一侧波瓣角能够覆盖约1/5的空域。当弹体水平时,1/4功率波瓣角可覆盖1/2空域,可接收天顶空域的卫星数据。所以,该天线无论处于何种姿态,理论上能够接收空中至少一半的卫星数据,实现全向接收。
综上所述,棒状单极子天线随着弹体进行高速旋转时,天线的对称轴并不转动,对于远场的卫星而言,单天线相位中心始终在天线对称轴上,也就是旋转中心上,而没有随着弹体旋转发生位置上的变化。
3 试验验证
上述通过对棒状单极子天线和阵列天线相位中心的分析可知,能够保证天线相位中心与旋转中心重合,不会随着弹体发生位置上的变化,消除了高转速条件下GPS接收机由于天线相位中心而引起的多普勒频率的跳变,能够在高速旋转条件下正常定位。
3.1 静态试验验证
对安装有棒状单极子天线的GPS弹载接收机静态定位试验。针对棒状单极子天线设计了低噪放,输入端与天线馈点直接焊接,噪声系数0.8dB,增益30dB。输出端与接收机通过射频同轴线连接,线长度为3m。
在地面静态测试中,将接收机输出数据通过RS232接口输入电脑,使用软件进行观察。测试环境为接收机周围100m内无高层建筑物,天线距离地面高度1.5m。
第一次接收机属于冷启动,天线垂直放置,通过软件可以判读锁定时间约15s。当搜索到4颗卫星后在1s内就锁定,共可搜索到至少5颗星。
关闭电源10min再次上电,天线垂直放置,接收机属于热启动,通过软件可以判读锁定时间约2s。关闭电源10min再次上电,天线斜向上45°放置,接收机属于热启动,通过软件可以判读锁定时间约2 s,接收机至少能接收6颗星。依次将天线水平放置、斜向下45°、倒立放置,接收机热启动锁定时间均在3s内。
静态试验验证了安装有棒状单极子天线的GPS接收机能够在静态条件下,适应各种姿态热启动迅速定位,与理论设计相吻合。
3.2 动态炮射试验验证
在静态试验验证成功后,在某靶场进行了动态炮射试验,弹丸载体为122mm榴弹。弹丸安装弹载存储器对定位数据进行存储,通过回收回读,与雷达测量数据对比,判断定位情况。
炮射前,先对GPS接收机加电至锁定,然后将接收机安装在弹体上,确保10min内进行炮射。射角25°。弹丸射击初速约720m/s,射程12.4km,转速约300r/s。弹丸回收后,读取数据,与雷达数据对比,对比曲线如图4所示。
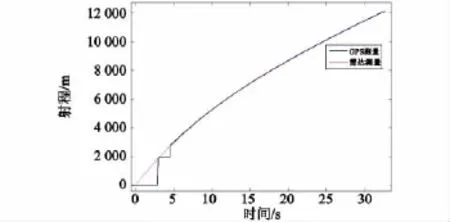
图4 雷达测量与GPS接收机测量射程曲线对比Fig.4 The contrast of measure curve between Radar and GPS receiver
从图4中可以看出,GPS接收机在出炮口后约5s,位置曲线就与雷达测量曲线相拟合,即意味着已经定位,并且在飞行全过程中均处于稳定定位状态,即将落地时数据才中断。
动态炮射试验证明接收机能够在动态炮射条件下实现全弹道快速定位。与理论设计相吻合,棒状单极子天线能够消除高旋转引起的多普勒频移,并实现全向定位。
4 结论
本文提出了能够消除高旋转下GPS接收机多普勒频率跳变的天线——棒状单极子天线。该类天线特征是天线对称轴线方便与弹轴重合,可与引信集成。首次通过动态试验验证了采用单天线方案旋转中心与相位中心重合,GPS接收机能够消除天线相位中心引起的多普勒频率跳变,在高旋转条件下,具有零相位中心特性,能够正常定位。由于棒状单极子天线尺寸取决于信号波长,所以尺寸较大,下一步将设计新型天线,减小天线尺寸。
[1]John D Kraus,Ronald J.Marhefka.Antennas:For All Applications,[M].章文勋,译.Third Edition.北京:电子工业出版社,2003.
[2]屈新芬,李世玲,谭惠民,等.微带天线对GPS卫星的可视性计算方法[J].探测与控制学报,2006,28(5):8-11.QU Xinfen,LI Shiling,TAN Huimin,et al.Computation mMethod and simulation of GPS visibility to micro-strip antenna[J].Journal of Detection & Control,2006,28(5):8-11.
[3]Elliott D Kaplan,Christopher J Hegarty.Understanding GPS Principles and Applications[M].寇艳红,译.Second Edition.北京:电子工业出版社,2007.
[4]周命端,郭际明,郑勇波,等.卫星天线相位中心偏移对GPS精密单点定位精度的影响研究[J].测绘通报,2008(10):8-11.ZHOU Mingduan,GUO Jiming,ZHENG Yongbo,et al.A study of the impact of satellite antenna phase center offsets on GPS precise point positioning accuracy[J].Bulletin of Surveying and Mapping,2008(10):8-11.
[5]高伟,晏磊,徐绍铨.GPS天线相位中心偏差对GPS高程的影响及改正研究[J].仪器仪表学报,2007,28(9):2 052-2 054.GAO Wei,YAN Lei,XU Shaoquan.Research of influence and correction of GPS antenna phase center deviation on GPS height[J].Chinese Journal of Scientific Instrument,2007,28(9):2 052-2 054.
[6]翟清斌,齐维君.GPS天线相位中心变化及测试[J].测绘科学,2004,29(2):60-63.ZHAI Qingbin,QI Weijun.Variation and testing of GPS antenna phase center[J].Science of Surveying and Mapping,2004,29(2):60-63.
[7]柯炳清,丁克乾.天线相位中心的测算及标定[J].遥测遥控,2009,30(6):66-69.KE Bingqing,DING Keqian.Calculation and measurement of antenna phase center[J].Journal of Telemetry,Tracking and Command,2009,30(6):66-69.
猜你喜欢
检验医学(2022年6期)2022-07-29
导航定位学报(2022年1期)2022-02-17
小学生必读(中年级版)(2021年12期)2021-12-02
海南医学(2021年5期)2021-03-25
兵器装备工程学报(2020年3期)2020-04-22
中国抗生素杂志(2019年6期)2019-07-06
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
弹箭与制导学报(2018年5期)2018-02-21
电子制作(2016年1期)2016-11-07