基于独立分量分析的运动声源波达方向估计
2012-12-01 02:11肖介山何双承
探测与控制学报 2012年5期
宁 强,方 向,潘 俊,肖介山,何双承
(1.解放军理工大学工程兵工程学院,江苏 南京 210007;2.解放军76332部队,湖北 广水 432721)
0 引言
在阵列信号的处理中,通过对信号子空间的探测并估计出波达方向(Direction of Arrival,DOA),可以实现对信号子空间跟踪[1-3]。对于DOA估计,常用的方法有波束形成法(Beamforming)和盲信号分离法。波束形成法常被用在基于雷达或声音的定位、卫星通信、超声波和CT图扫描像分析等领域,如文献[4—5],属于静止信号源的DOA估计;而盲信号分离(Blind source Separation,BSS)方法常用于生物医学方面,如脑电图、脑磁图及核磁共振成像分析等,如文献[6—7],属于基于图像的运动目标探测。而对于运动声源的DOA估计,波束形成法和盲信号分离法存在不能分辨临近目标、计算量大等问题[8-9]。
针对上述问题,本文提出基于完全正交分解的独立 分 量 分 析 (Complete Orthogonal Decomposition Independent Component Analysis,COD-ICA)的运动声源DOA估计方法。
1 基本原理
1.1 独立分量分析基本原理
独立分量分析的概念最早由Jutten和Herault[10]等人在20世纪80年代早期提出,它在信号分离、冗余消除和降噪方面的优越性已经受到了广泛地关注。其基本原理为:
x[k]= [x1[k],x2[k],…,xn[k]]T为n个传感器对源s(t)采样,k为采样时刻。传感器信号可以描述为:

式中,A为混合矩阵,式(1)描述了源信号混合过程。一般要求n≥m(m为源的个数)。v[k]为噪声。
由于混合矩阵A未知,无法从观测信号直接求出源信号,这就需要构造分离矩阵W。x[k]经预处理后得到z[k],z[k]=Tx[k],则

源信号得以分离。
1.2 完全正交分解基本原理
矩阵X[k](n×N)经GIVENS旋转可作如下分解:

式中,U[k](n×n)和V[k](N×N)均为正交矩阵,M[k]为下三角矩阵(或上三角矩阵),如:

式中,L[k]和G[k]均为下三角矩阵,L[k]同时是非异矩阵,这就是矩阵的完全正交分解(COD)[11-12]。
2 运动声源波达方向估计
由于目标声源与环境噪声、测量系统噪声是独立的,固可以采用ICA方法进行DOA估计;又因为目标声源是运动的,其混合系统是时刻变化的,这就要求ICA信号处理系统拥有良好的数据更新能力,所以先采用COD方法对信号进行预处理。
2.1 基于COD的信号预处理
选用COD对采样信号进行预处理,其目的在于:一是便于探测信号子空间,确定信号源数目;二是结合GIVENS旋转便于数据的更新和释放。
如图1所示,将X[k]经COD变换后,由式(4)中L[k]的秩r来确定目标源的个数。当传感器接收到新信号x[k+1]时,即:[k+1]= [X[k],x[k+1]],此时经GIVENS旋转,可以得到其COD分解:


按照上述步骤即完成了信号的更新。

图1 基于COD-ICA的DOA计算流程Fig.1 The flow of DOA based on COD-ICA
2.2 DOA估计
下面对运动声源目标进行DOA估计。
在线白化矩阵T[k+1]可以表示为:

分离矩阵为:W[k+1]=W[k]+η[k]GH[k+1]。由于(WT)-1与经线性变换和放缩后的混合矩阵A是等价的。则可以由(WT)-1实现DOA估计。

2.3 步长确定
由式(7)可知,要完成DOA估计,还需要确定步长η[k]。
对于时变混合系统,总可以找到足够短的时间窗口η(步长),使得在时间窗口η内声源位置变化比较小,可以认为混合系统变化是不变的,即混合矩阵A是不变的。
此时,步长η的选择至关重要。步长η愈大,计算速度愈快,但计算精度不高;步长η愈小,计算精度愈高,但计算速度慢。因此,计算速度快且精度高的步长η实际上是不存在的,只能在一定精度要求下选择合适的步长。在文献[13—14]中,A.Cichoki提供了多种基于梯度的自适应步长选择方法,并把这些方法统称为步长选择梯度滤波算法。本文采用梯度下降低通滤波进行步长η的确定:

2.4 算法比较
表1给出了以上计算过程的运算量,文献[1]给出了波束形成法的运算量为3mn2+(mn)2+O(m3)+O(nr),可见基于COD-ICA的DOA估计计算更便捷,更易于实现。

表1 COD-ICA运算量Tab.1 Operation count for COD-ICA
3 实验与分析
3.1 实验设置
本次实验采用履带式坦克作为待探测运动目标。考虑到坦克(源信号)之间是相互独立的,同时源信号与噪声(环境噪声和系统噪声)之间也是独立的,满足采用ICA方法进行盲源分离的要求。
坦克从静止启动后,在跑道上匀速直线行驶,由于场地限制坦克速度为20km/h。两个传感器位于坐标点(0.25,-0.25)和(-0.25,0.25),传感器排列方向与坦克行驶方向平行,如图2所示。传感器采样频率为10 240Hz,坦克自带GPS,采样间隔为0.05s,记录其方位角。坦克运动后传感器和GPS开始采样,a、b分别都记录了559 834个采样点,GPS记录了1 200个采样点。
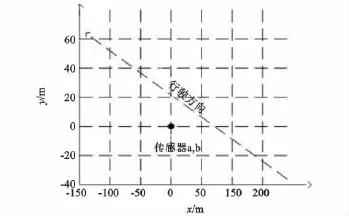
图2 实验示意图Fig.2 The sketch map of experiment
3.2 实验数据分析
图3为a、b两个传感器采集信号的前半部分(2×105个采样点,时长约19.5s)。由于a、b传感器距离比较近(0.7m),可知其信号波形是非常相似的。
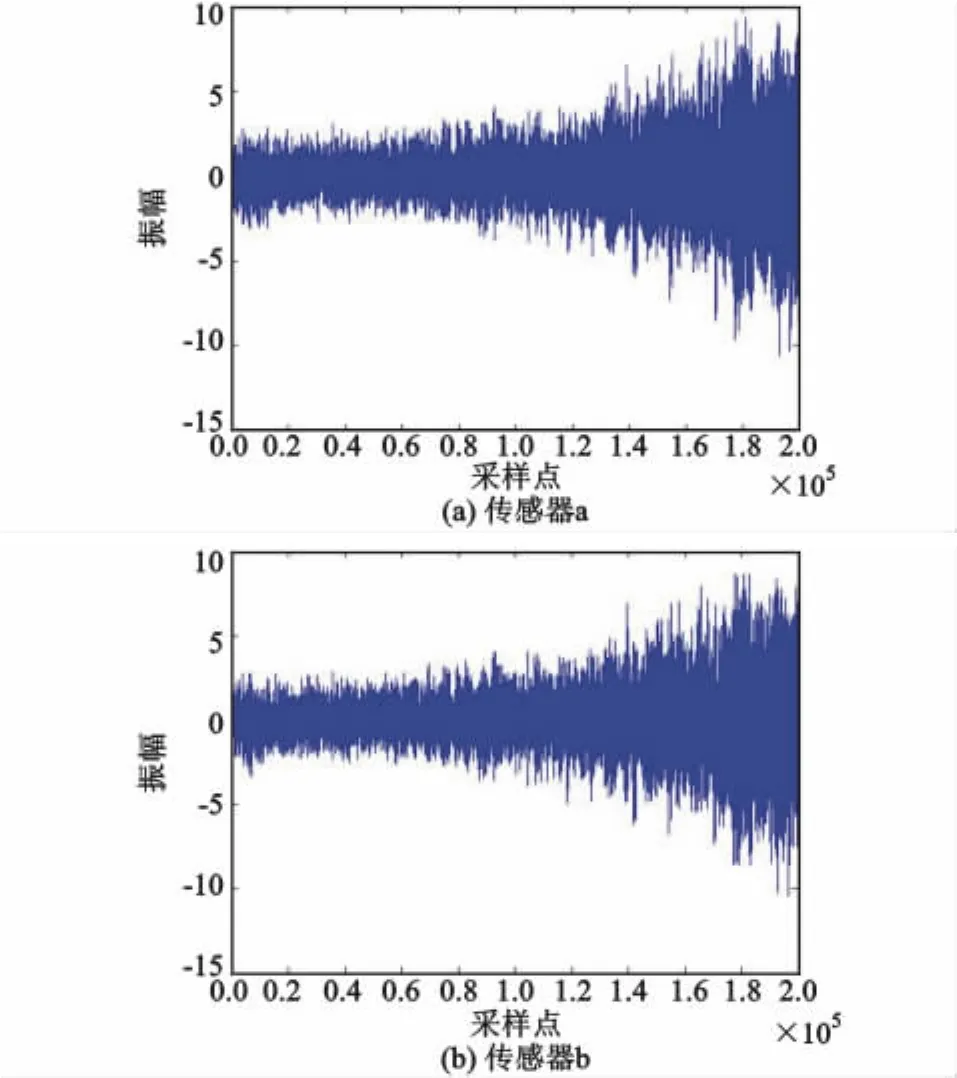
图3 采集信号Fig.3 The collection signal
图4中的横坐标对应GPS采样点。在前40点(即0~2s),采用COD-ICA算法得到的DOA估计与GPS实测值差异比较大;之后DOA估计值迅速收敛;到200点时,DOA估计值与GPS实测值之间的均方差为:MSE=E{-α)2}=0.035
由图4可以看出,采用COD-ICA算法,并结合梯度下降低通滤波步长选择,能够适时准确实现盲条件下坦克的探测和跟踪。采用梯度下降低通滤波选择步长,能够实现快速收敛。

图4 DOA的计算结果与GPS比较Fig.4 The contrasting between calculation result and GPS data
在坦克驶离传感器较远时,该算法结果与GPS记录数据差异逐渐增大,这是传感器响应信号的信噪比减小的原故。在坦克距离传感器较近时,波达方向变化率增大,此时该算法依然很稳健。
4 结论
本文采用ICA算法对雷场运动声源信号进行DOA估计。通过COD对信号进行去噪和降维预处理,能准确探测声源数量;结合GIVENS旋转实现了ICA算法数据的迅速更新和释放。坦克目标探测试验表明:采用COD-ICA信号处理技术,满足在线数据处理要求,收敛迅速,对运动声源目标波达方向在线估计是可行的,为雷场运动目标的探测和跟踪提供了新的方法。
[1]袁泉,石昭祥.一种基于空间时频分布的波达方向估计方法[J].探测与控制学报,2007,29(2):50-53.YUAN Quan,SHI Zhaoxiang.A method of direction-ofarrival via spatial time-frequency distribution[J].Journal of Detection & Control,2007,29(2):50-53.
[2]王宏,李洪升,杨日杰,等.一种基于改进传播算子的波达方向估计方法[J].探测与控制学报,2007,29(3):41-44.WANG Hong,LI Hongsheng,YANG Rijie,et al.An improved PM-based approach to DOA estimation[J].Journal of Detection & Control,2007,29(3):41-44.
[3]金翔,张天骐,侯瑞玲,等.分数阶傅里叶变换与虚拟阵列相结合的波达方向估计[J].探测与控制学报,2010,32(5):55-59.JIN Xiang,ZHANG Tianqi,HOU Ruiling,et al.DOA estimation based on combining of fractional fourier transform and virtual array[J].Journal of Detection & Control,,2010,32(5):55-59.
[4]Josh Griffith Erling.Ststitical prefomancl analysis of source localization in multisorce,multiarray networks[D].US:The Pennsylvania State University,2005.
[5]苏永振,袁慎芳.基于独立分量分析的多冲击源定位方法[J].振动与冲击,2009,28(8):134-137.SU Yongzhen,YUAN Shenfang.Method for locating multiple impact sources based on independent component analysis[J].Journal of vibration and shock,2009,28(8):134-137.
[6]冯毅.基于独立分量分析的运动目标检测与跟踪[D].大连:大连理工大学,2008.
[7]甘玲,刘国庆.基于小波提升和独立分量分析的运动目标检测[J].计算机应用于软件,2010,27(5):257-159.GAN Ling,LIU Guoqing.Moving object based on lifting wavelet transform and independent component analysis[J].Computer Applications and Software,2010,27(5):257-159.
[8]Shoko Araki,Hiroshi Sawada,Ryo Mukai,Shoji Makino.DOA estimation for multiple sparse sources with arbitrarily arranged multiple sensors[J].J sign process syst,2011(63):265-275.
[9]Masnadi M A,Banani S A.Separation and tracking of maneuvering sources with ICA and particle filters using a new switching dynamic model[J].IEEE Transactions on aerospace and electronic systems,2010(6):988-100 5.
[10]Jutten C,Herault J.Blind separation of sources,Part I:An adaptive algorithm based on neuromimatic architecture[J].Signal Processing,1991,24(1):1-10.
[11]张贤达.矩阵分析于应用[M].北京:清华大学出版社,2004.
[12]Christian M Coviello.Source separation and tracking for time varying systems[D].US:The Pennsylvania State U-niversity,the Graduate School,2005.
[13]Cichoki A,Amari S,Adachi M,Kasprzak W.Self-adaptive neural networks for blind separation of sources.[J].IEEE international symposium on circuit and systems,1996(2):157-161.
[14]Cichoki A,Orsier B,Back A,et al.On line adaptive algorithms in non-stationary environments using modified conjugate gradient approach[C]//In Process of 1997 IEEE Workshop on NNSP.US:IEEE,1997:316-325.
猜你喜欢
学与玩(2022年8期)2022-10-31
肇庆学院学报(2022年5期)2022-09-29
舰船科学技术(2022年11期)2022-07-15
成都信息工程大学学报(2021年5期)2021-12-30
西安邮电大学学报(2021年1期)2021-04-19
小学生学习指导(小军迷联盟)(2020年12期)2021-01-05
电子制作(2019年23期)2019-02-23
科技知识动漫(2017年5期)2017-05-11
电子制作(2016年19期)2016-08-24
北京航空航天大学学报(2016年12期)2016-02-27