
色选机喂料器振幅和产量控制的研究*
2012-11-24 02:17付理祥郑力新
网络安全与数据管理 2012年24期
付理祥,郑力新,樊 辉
(华侨大学 信息科学与工程学院,福建 厦门361021)
色选机作为粮食加工的一种重要工具,因其较高的选别效率而迅速普及。目前,在工业生产中,大部分的国产色选机喂料器采用的是开环控制系统,因价格较为低廉,在农村广泛使用。这些色选机在工作过程中,由于受到农村电网电压的频繁波动和物料重量突然变化等多种因素的影响,喂料器的振幅会发生较大的变化。喂料器振幅过小会使物料在通道内翻滚跳动,影响色选精度,同时也影响产量;振幅过大则会导致通道内料层过厚,色选装置不能充分识别筛选,影响色选的精度[1]。鉴于采用开环结构的色选机喂料器不能对振幅进行实时跟踪监测与有效控制,本文提出了基于积分控制的闭环控制改进方案,对喂料器的振幅稳定和产量稳定做出了进一步的探索。
1 系统的实现
1.1 硬件实现
本色选机喂料系统在原开环控制的基础上,增加了反馈功能模块,以实现闭环控制功能。改进后,系统由控制执行部分、反馈部分和核心处理部分等3个部分组成。其结构关系如图1所示。
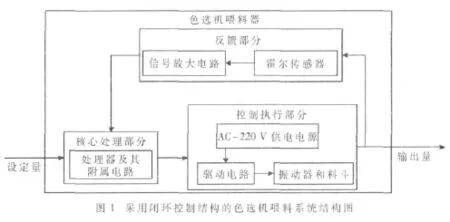
控制执行部分根据核心处理部分发出的控制信号对喂料器的振幅进行实时调节。反馈部分采集喂料器的实际振动振幅数据并传递给核心处理部分进行处理。核心处理部分根据事先编制好的积分运算规则将数据处理后传递给控制执行部分。3个部分紧密结合,构成喂料器振幅控制系统。
1.1.1 控制执行部分
控制执行部分由驱动电路、振动器和料斗等组成。振动器由AC~220 V~50 Hz电源供电,通过可控硅驱动激振线圈。电流流过振动器的激振线圈时会产生电磁力,改变可控硅的导通角可以改变流过激振线圈电流的时间,进而可以改变电磁力的大小,振幅也随之改变。合理地控制可控硅的触发角,可以得到所希望的振幅[2]。
1.1.2 信号反馈部分
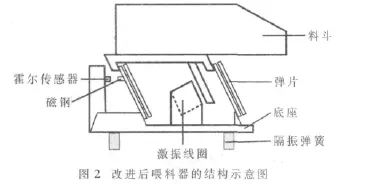
在喂料器的底座上固定一个霍尔传感器(本系统采用的型号为49E),在后端弹片靠近传感器的位置吸附一块小磁钢,如图2所示[3]。喂料器在工作过程中,霍尔传感器和磁钢的相对距离不断变化,由于霍尔传感器的霍尔效应,它可以实时监测振动器的振动情况并产生相应的连续变化的电压信号。该霍尔传感器的输出电压信号较小,需放大后才能被处理器所检测和识别。
最初,将信号放大部分电路和核心处理部分电路做到一块电路板上,在电路工作中,模拟部分与数字部分之间会相互干扰;处理器发出的触发脉冲对传感器刚输出的小信号也会造成较大干扰。随后,将信号放大电路单独做板,并在原板上实行模拟地与数字地单点共地,有效地解决了上述干扰问题。信号放大电路原理图如图3所示。

1.1.3 处理核心部分
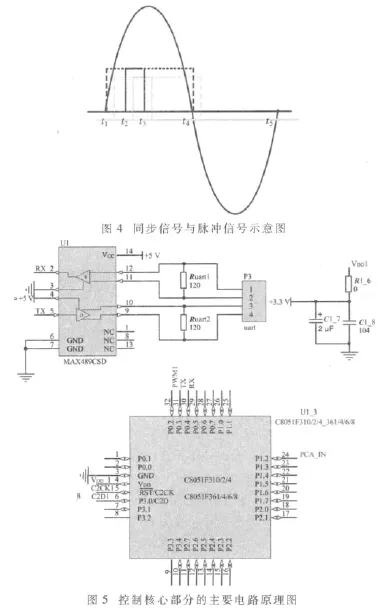
本部分由处理芯片及其附属电路、485通信接口等组成。本系统采用新华龙80C51F310处理芯片作为数据处理的核心。处理器实时接收传感器传回的振动数据并在线对其进行A/D采样预处理,之后将该采样值与系统设定量的差值e(k)作为系统的输入值,处理器根据输入值运用预先设定的积分运算规则处理后调整可控硅的导通角,输出触发脉冲。在本部分中,触发脉冲的频率和电源的频率要同步,并且在一个周期内的位置要恰当,才能在正确的时刻发出触发脉冲。本系统在正半周期的起点t1开始计时,处理器根据当前的振动数据情况计算脉冲发出的时间t2,在时间到达t2时刻时产生一个+5 V的脉冲,来控制可控硅的导通角,如图4所示。本部分设计了通信接口,利用RS485接口与计算机进行通信,以便在计算机上对振动参数进行监测和控制。控制核心部分的主要电路原理图如图5所示。
调试过程中,可控硅导通时,电流瞬间加载于激振线圈,产生较强的磁场,与磁钢产生的磁场进行叠加,干扰了其正常的磁场,使输出的振幅信号产生较大的振荡。示波器观测到放大后的振幅信号波形在可控硅开启时刻的位置始终有个100 mV左右的3 μs~4 μs的振荡,使 ADC采集回的波峰或波谷位置的振幅数据有误差。因为喂料器本身的限制,磁钢与霍尔传感器的安装位置无法远离激振线圈,故在A/D采集数据时做出处理,在触发脉冲发生的时刻开始,丢掉两个实时位置数据,从而避免了在毛刺位置产生较大误差。这样,反馈数据得到了较为有效的采集。
至此,3个部分有机地结合在一起,形成了一个闭环控制系统[4]。
1.2 监控系统
本文使用LabWindows/CVI制作了喂料器振幅监控系统,如图6所示。在本喂料系统中,利用RS485通信接口与喂料器硬件设备进行通信,把采集到的振幅显示在监控面板上,同时,监控面板可以设定开环和闭环状态下喂料器的振幅,以便实现效果的对比[5]。

1.3 控制算法
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好、可靠性高,被广泛应用于过程控制和运动控制中。
在开始设计时,采用的是比例算法。在图6所示的控制面板闭环控制区设置振幅在280以内时,控制回路可控;设定振幅超过280,则极易产生振荡。分析其原因是振动器振幅变化量较大,但作为调节量的触发角有上下界的限制,在变化剧烈的情况下极易产生误差正大、负大的现象,使触发角在两个极限位置波动,导致系统振荡。
根据多次调试结果和经验,本系统的控制算法改进为积分控制算法,避免了比例算法的剧烈波动。积分控制算法为:

其中,TI为积分系数。
在计算机等数字处理系统中,一般采用其增量式控制算法:

其中,KI为积分时间常数,k为采样时间点。KI在误差较大时取值比较大,在误差较小时取值比较小[6]。在本系统中,误差e(k)在[-6,6]区间即可满足设计需求,此时,取KI=1.3。本系统采用积分控制算法后的流程图如图7所示。

采用积分控制算法后,振动量的改变即使较大,误差也有个递进的梯度,通过误差累积后再起控制作用,可有效地对振幅进行控制。利用此方法对喂料系统进行控制,可以得到较好的效果。
2 实验效果对比
2.1 振幅稳定性测试
2.1.1 开环控制实验
在电压为AC~220 V~50 Hz的条件下,喂料器振幅监控面板开环控制调节区设定振动量为570(本监控系统可以同时监控5路,本文只用1路做测试实验,选用的物料为大米,下同)。在工作时料斗内原有大米0.6 kg,当大米重量突然增加0.6 kg时,测试多次后取其中一次的振动数据如图8所示。由此可见,在开环状态下,大米重量突然增加后,喂料器振幅减小后就很难再恢复。

2.1.2 闭环控制实验
相同条件下,喂料器振幅监控面板闭环控制调节区振动量设定为570,当大米重量突然增加时,测试多次后取其中一次的振动数据,如图9所示。可以得到,在闭环控制状态下,大米重量突然增加后,喂料器振幅变小后在几个周期后逐渐恢复原先设定的振幅,鲁棒性能好,抗干扰能力强。

2.2 产量稳定性对比
2.2.1 开环控制实验
以供电电源AC~220 V~50 Hz时的产量作为参考值,在控制面板上设置开环振动量为260,实验条件是在米量足够的情况下每下落10 kg记时一次,测试4次,取消耗时间的平均值作为消耗时间的计算值。该条件下换算成产量为 0.352 9 t/h。电压为 160 V、180 V、200 V、220 V、240 V时的实验测试数据如表1所示。与参考条件下对比,产量最大误差为181.25%。开环控制产量变化过大,难以满足产量稳定的要求,同时又对色选精度造成了影响。
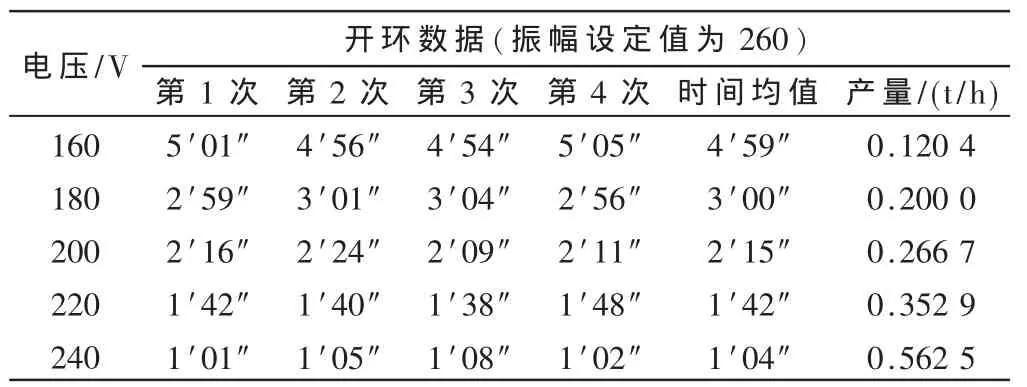
表1 开环实验数据记录表
2.2.2 闭环实验
以开环控制时电源为AC~220 V~50 Hz时的产量作为参照标准,在闭环控制220 V的测试条件下,要达到开环控制一样的产量,这时要在控制面板上设置闭环振动量为250,在米量足够的情况下每下落10 kg记时一次,测试4次,取消耗时间的平均值作为消耗时间的计算值。该条件下换算成产量为0.352 9 t/h,电压为160 V、180 V、200 V、220 V、240 V时的实验测试数据如表 2所示。本组测试最大误差为12.10%。实验结果有着良好的一致性。
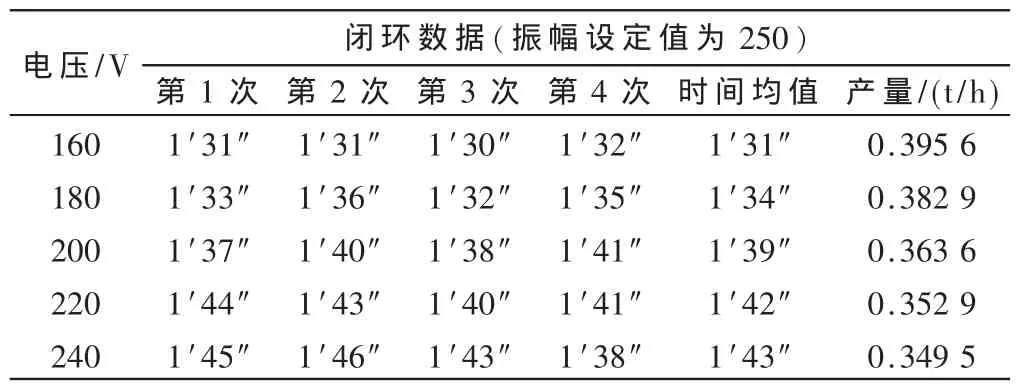
表2 闭环实验数据记录表
经开环和闭环实验对比表明,喂料器采用积分运算方式改进后的闭环控制系统抗干扰效果显著,振幅能在设定值处稳定,产量稳定,达到了设计预期的效果。
色选机喂料系统是个复杂的系统,本文提出了基于积分控制的闭环控制方法,使得本喂料器振幅能根据实际情况进行自适应。经过实际测试,该系统对工业生产中经常遇到的诸如电网电压的波动和物料重量的突然变化等情况有较好的适应能力。本系统可以在线控制振幅的稳定,对提高色选精度和稳定产量有着很大的辅助作用,达到了预期的改进效果,有着较大的实用价值。
[1]高瑞,张永林,王旺平,等.散体物料光电色选机模糊 PID控制系统研究[J].武汉理工大学学报(交通科学与工程版),2008,32(4):634-637.
[2]林少伟,胡怀荣.电磁振动式给料设备控制方式的改进[J].华东电力,2004,32(10):60-62.
[3]贺为群.浅谈RNGS系列色选机的创新点[J].粮食与饲料工业,2006(7):4-5.
[4]MUSTAFA B,MEHMET D O.Determination of applicability and effects of color sorting system in bulgur production line[J].Journal of Food Engineering,2006(74):232-239.
[5]王建新,隋美丽.LabWindows/CVI虚拟仪器测试技术及工程应用[M].北京:化学工业出版社,2011:1-9.
[6]李元春.计算机控制系统[M].北京:高等教育出版社,2005:112-121.
猜你喜欢
农机使用与维修(2022年12期)2022-12-16
选煤技术(2022年3期)2022-08-20
电气电子教学学报(2022年3期)2022-07-30
燃料化学学报(2022年5期)2022-05-30
科技信息·学术版(2021年8期)2021-01-10
北广人物(2020年8期)2020-03-19
作文通讯·初中版(2017年12期)2018-03-31
工会博览(2016年11期)2016-07-02
现代农业装备(2015年4期)2015-12-15
海军航空大学学报(2015年1期)2015-11-11
