
水陆状态下自动机参数分析及设计
2012-11-22 01:46:46何云峰王昌明张爱军
火炮发射与控制学报 2012年3期
鲁 刚,何云峰,王昌明,张爱军
(南京理工大学 机械工程学院,江苏 南京 210094)
水下轻武器在国外是一个研究的热点,俄罗斯、美国、德国和英国等许多国家已经研制出相关装备。两栖轻武器是最近几年才公开报道的装备,据报道,俄罗斯1991年研发了第一种两栖突击步枪,又经十余年的努力,于2000年研制成功的ASM-DT5.45 mm两栖突击步枪,通过了国防部的全面试验鉴定(包括陆上和水下)。5.45 mm两栖突击步枪的装备,将使俄罗斯特种部队的武器更加先进,不但可以简化装备,而且较好地解决了水下、陆上战斗状态的及时转化问题,极大地提高了特种作战部队的攻击和防御能力。近年来,俄罗斯又研制了ADS5.45 mm两栖突击步枪,增加了1个可拆卸的40 mm榴弹发射器,膛口可以加装制退器/减震器、消声器或空包弹发射适配器,另外ADS两栖突击步枪还重新选择了制造材料,配有可调节的机械瞄具,机匣顶部设计有一体式提把,提把上方加装皮卡汀尼导轨,可以安装各种昼夜光学瞄具,近年来才刚刚装备俄军部队,执行海上安全和反恐任务,目前,根据它的性能,ASM-DT突击步枪是世界上唯一的一种两栖突击步枪[1]。
文献[2-6]分别对陆上自动机的测试技术及虚拟测试技术进行了相关研究,利用激光传感器测得需要的位移和速度参量,而对于两栖武器自动机的测试则鲜有报道。两栖武器的总体构想是基于陆上和水下可同时使用,对其综合性能的研究是非常重要的,而对自动机运动性能的分析研究又是其中关键的一个环节,本文旨在通过自动机运动参数的研究,对比陆上和水下不同介质条件下自动机工作特性,为两栖自动机的研究提供参考。
1 自动机运动规律分析
自动机的各工作机构如闭锁机构、供弹机构和击发机构等都是用来传递活动机件中原动件如枪机、枪机框等的运动的,用来使工作件如枪体、枪机框或击锤等完成有关射击的动作。自动机参数分析系统组成框图如图1所示[7-8]。

两栖轻武器也是具有导气装置的自动武器,气室内的火药气体压力使自动机主动件运动。发射时,膛内火药燃气推动弹头前进,弹头经过导气孔后,火药燃气经导气孔进入气室,作用在自动机的活塞上,带动枪机开始运动。当经过枪管上开出的导气孔时,火药气体泄露,在陆上和水下射击时,两栖轻武器是通过调节放气孔的大小来控制火药气体的泄露的,在陆上射击时,使用大的放气孔,在水下射击时,使用小的放气孔。此时,枪机要完成自由行程、旋转开锁以及抛壳等动作。火药气体的作用结束后,自动机主动件的速度迅速下降,但是由于惯性原因主动件继续后坐,在惯性后坐的过程中会压缩复进簧,直到后坐到位。后坐到位后,复进簧伸张力的作用下主动件开始复进,完成推弹行程及旋转闭锁动作,速度下降直至为零,复进到位。在复进到位后,主动件由于与枪体(机匣)发生碰撞,枪体还会存在轻微短暂的振荡。
自动机主动件的运动包括后坐和复进两个过程。细分开来,在主动件后坐期间,包括自由行程、开锁行程、抽壳行程和抛壳位置以及后坐到位;在主动件复进期间,包括挂机前行程、推弹前行程和推弹行程、闭锁行程、闭锁后行程、击发行程。自动机参数测试结果如表1所示。
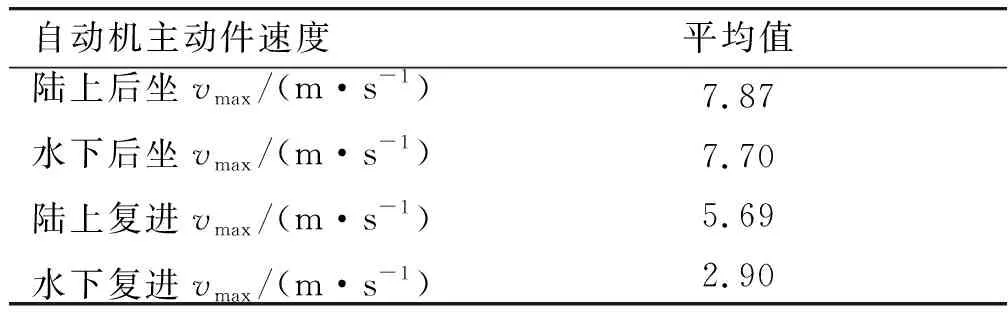
表1 自动机参数测试数据
由表1可见,自动机主动件在陆上后坐的平均最大速度为7.87 m/s,在水下为7.70 m/s;在陆上复进的平均最大速度为5.69 m/s,在水下为2.90 m/s,可知,主动件在陆上和水下后坐时的最大速度相差不大,但复进时的最大速度相差明显,陆上为水下的2倍左右。
2 自动机设计
2.1 提高自动机寿命的技术措施
两栖轻武器开闭锁方式可采用旋转闭锁方式,使得能量消耗相对较小,同时使得各构件之间的碰撞速度尽可能的低,这些也是陆用枪及水下枪械在提高武器寿命时常采取的措施。
两栖轻武器的使用环境是陆上和水两种介质,在陆上达到300~400 m的有效射程就可以起到有效威慑的作用,但在水下的威力要达到相关水下轻武器的水平。自动机就必须选用相对耐腐蚀性强的材料,这样可以保证在水下射击时,自动机具有抗腐蚀性,另外,还要注意零件材料相互间的匹配,避免由于零件材料的不同而造成的电位差异,使得零件在水中相互电腐蚀,影响自动机的性能。弹簧可选用不锈弹簧钢丝。这些措施对提高两栖自动机的寿命有很大的作用。
2.2 提高工作可靠性的技术措施
根据两栖使用的特点,对自动机可采取多种技术措施来提高工作的可靠性。
1)加大自动机主动件与从动件的质量比,增加机框的质量,以使自动机的存速性能提高。
2)采用自动机前冲击发的开膛待击方式,利用自动机主动件复进时的能量击发,用主动件的惯性来克服和减小水深对击发能量的影响。
由于需要陆上和水下使用,两种弹药的长度差异较大,在使用时要互换两种长度不同的弹,使得自动机主动件相对两种弹匣后端的位置不一致。这个问题可通过自动机前冲击发的开膛待击方式来解决。此种方式是在待击状态时,主动件停留于挂机位置,利用自动机主动件复进到位的能量击发。因此,自动机主动件必须能够保证一定的复进到位的速度,从而保证击发的可靠性。所需要的复进簧的簧力相对较大,在浅水和陆上复进到位的撞击相对较大,击发能量随自动机速度的变化而变化。
3)导气装置可采用调整气室放气孔大小的放气式能量调节方式,这与采用调整导气孔大小方式的枪械相比,在水中射击时有更大的优势。由于采用这种导气装置,使得自动机主动件的复进时气室内介质的排泄多了一个通道,同时在枪体上开出许多排液孔,使主动件在复进过程中能更好地排泄掉气室内的水,从而使得主动件的复进阻力相对较小,能更好地保证主动件复进到位时的速度。该种自动方式的最大优点是在不同环境条件下使用,既能保证自动机有足够的工作能量,又能平稳地工作,但武器的结构比自由枪机式要复杂。
4)调整复进簧力,保证自动机主动件在不同水深处有一定的复进到位速度,大约为3 m左右,同时调整导气孔大小,保证主动件在不同水深处有一定的后坐到位速度。
2.3 影响自动机运动规律的因素
通过试验现象,分析试验结果可知,自动机主动件的运动主要由以下因素决定:
1)火药气体的作用。
2)自动机运动时各构件间的碰撞。
3)机匣内介质在自动机运动时的运动状况。
4)气室内的介质在自动机主动件复进时的泄露状况。
因此,自动机主动件后坐到位缓冲装置的设置是非常必要的,它可以吸收和消耗主动件后坐到位时的多余的能量,大大减少主动件后坐到位时的冲击作用。在两栖步枪中,采用杠杆转换式缓冲装置,通过调整簧力达到最佳状态,可提高射击的稳定性,减缓射击时对射手的冲击力。
分析试验结果可知,水下发射时,由于水中的阻尼较陆上的要大得多,自动机在运动中会表现出:在水中自动机主动件速度衰减比在空气中快;水下自动机主动件运动时消耗的能量比在陆上运动时消耗的能量要大些,因此在水下发射时,要增加弹药的装药量,以保证主动件在复进到位时达到完成发射所需要的速度。由于自动机要满足不同水深时的运动要求,在浅水和陆上发射时,势必会存在较大的碰撞,自动机各构件间的碰撞会对自动机构成以下的影响:
1)活动机件运动速度的突然变化会影响到工作的平稳性,并有能量损失,而使射击频率降低。
2)构件碰撞时能产生很大的惯性力,影响零件的强度和寿命。
3)抽弹和推弹时的碰撞可能会影响自动机工作的可靠性。
4)活动机件在前后方位置的碰撞,会影响武器的射击精度。
在进行能量分析时,要保证构件的能量在碰撞后能完成射击的动作。为了减少碰撞能量的损失,可在结构上将传速比限制在一定数值之下,以减轻碰撞的不利影响。
3 两栖自动机研究的技术难点
要满足陆上和水中使用的要求,在自动机运动规律的研究上存在很大的难度,主要针对以下两个问题进行解决:
1)在两种介质中工作时,自动机的可靠性。自动机在满足水下机构动作要求的可靠性的同时,需要满足在陆上使用时机构动作的可靠性要求。保证自动机在水下运动时各机构动作可靠,需要尽可能多的在相关零件上开出排液口,以便减小自动机主动件在复进和后坐过程中水阻力,但是这同时使得枪的防尘能力下降,可能在陆上使用时,风沙环境会使自动机主动件在运动时容易发生故障。由于这个矛盾会永远存在,所以在此需要找出它们之间的一个平衡点。导气装置上采用调整气室放气孔大小的放气式能量调节方式。
2)陆上自动机运动剧烈,致使自动机各部件的寿命会受到影响。由于是在两种介质中使用,而且两种介质的密度相差很大:水的密度大约是空气的800倍。通过能量调节器可以对后坐的能量进行调节,使得自动机主动件在陆上和在水下运动时的最大后坐速度基本相当。虽然可在自动机的材料选择、结构设计以及工艺改进等方面做大量的工作,但是还需要找出一种可以使复进簧力的大小在两种介质中方便转换的方法,致使自动机主动件在陆上的复进运动的速度与在水下时复进运动的速度相差1倍左右。在陆上自动机运动时,各机构部件间以及自动机主动件与枪体间的碰撞相对来说要比在水下剧烈一些,使得碰撞零件的寿命受到影响,从而影响到陆上全枪的寿命。
4 结 论
本文从自动机运动规律的入手,分析了陆上和水下自动机运动规律的差异,根据其使用环境的差异和特殊性,提出了提高自动机寿命、工作可靠性的技术措施,分析了影响自动机运动规律的因素,指出了两栖自动机研究的技术难点,为该类型武器的研制提供了一些有意义的参考。
参考文献(References)
[1] 明光,三土.从APS到ADS:俄罗斯水下武器探索全过程[J].轻兵器,2011(1):13-17.
MING Guang, SAN Tu. From APS to ADS: the discover course of Russia underwater weapon[J]. Small Arms, 2011,1: 13-17.(in Chinese)
[2] 安宝林,包建东,王昌明,等.基于虚拟仪器的枪械综合测试方法研究[J].测试技术学报.2009,23(6):557-559.
AN Bao-lin, BAO Jian-dong, WANG Chang-ming, et al. The integrated test method for weapons based on virtual instrument[J]. Journal of Test and Measurement Technology. 2009, 23(6): 557-559. (in Chinese)
[3] 刘吉,周汉昌.自动机运动规律测试系统的研制[J].光学与光电技术.2007,5(5):23-25.
LIU Ji, ZHOU Han-chang. The measurement system design of automatic mechanisms movement rule[J]. Journal of Photics and Photoelectricity Technology. 2007, 5(5): 23-25. (in Chinese)
[4] 郭凯,徐诚,卜雄洙,等.基于虚拟仪器技术的枪械自动机测试系统[J].弹道学报.2000,12(3):79-83.
GUO Kai, XU Cheng, BU Xiong-zhu, et al. The automatic mechanisms measurement system of gun based on virtual instrument[J]. Journal of Ballistics. 2000, 12(3): 79-83. (in Chinese)
[5] 郭凯,卜雄洙,李建春,等.基于虚拟仪器技术的武器综合测试系统[J].火炮发射与控制学报.2002,4:34-37.
GUO Kai, BU Xiong-zhu, LI Jian-chun, et al. The integrated weapons measurement system based on virtual instrument[J]. Journal of Gun Launch & Control. 2002(4):34-37. (in Chinese)
[6] 倪进峰,徐诚,王亚平.武器自动机虚拟试验技术研究[J].系统仿真学报.2006,18(6):1558-1561.
NI Jin-feng, XU Cheng, WANG Ya-ping. The virtual examination technology research of weapon automatic mechanisms[J]. Journal of System Simulation. 2006, 18(6): 1558-1561. (in Chinese)
[7] 王昌明,孔德仁,何云峰.传感与测试技术[M].北京:北京航空航天大学出版社,2005:326-331.
WANG Chang-ming, KONG De-ren, HE Yun-feng. Sensor and mesurement technology[M]. Beijing: Beijing Aviation and Astronautics University Press, 2005:326-331. (in Chinese)
[8] 陈静.水下机构运动测试及动力学分析[D].南京:南京理工大学,1999.
CHEN Jing. The movement measurement and dynamics analysis of underwater machine[D]. Nanjing: NJUST, 1999. (in Chinese)
猜你喜欢
文萃报·周二版(2022年24期)2022-06-16 22:04:19
发明与创新(2021年39期)2021-11-05 07:15:40
小哥白尼(军事科学)(2021年6期)2021-11-02 05:25:16
数学物理学报(2021年3期)2021-07-19 06:02:50
小学科学(学生版)(2020年1期)2020-01-19 06:02:06
智富时代(2019年4期)2019-06-01 07:35:00
西北大学学报(自然科学版)(2018年2期)2018-04-18 06:53:55
中华诗词(2017年4期)2017-11-10 02:18:29
军事体育学报(2016年2期)2016-06-15 20:28:12
都市丽人(2015年2期)2015-03-20 13:32:31
