
自行高炮动态模拟训练器结构设计
2012-11-22 01:46:48田景辉蒋彦明薛庆阳郑峰峰
火炮发射与控制学报 2012年3期
田景辉,蒋彦明,薛庆阳,郑峰峰
(1.西北机电工程研究所,陕西 咸阳 712099;2.山西北方机械制造有限责任公司,山西 太原 030009)
模拟训练器是某自行高炮武器系统的配套装备,主要用于学员上炮前的模拟培训[1]。近年来,随着新型自行高炮陆续装备部队,为了尽快掌握高炮武器系统的基本操作技能,使训练结果真实有效,新型高炮对模拟训练器提出了更加接近实战环境的要求,以往的桌面式模拟训练器已不能适应部队日常训练的需要,大型的具有一定技术含量的动态模拟训练器在主战坦克、步兵战车、战斗机等领域已广泛应用,但用于自行高炮系统的动态模拟训练器,国内尚无报道[2]。为此,笔者依据某自行高炮模拟训练器的战技指标和功能要求,成功研制了一种与自行高炮人机界面相同,操作环境近似,能够模拟炮塔方位回转且具有一定机动能力的动态模拟训练器。解决了学员在已往桌面式模拟训练器上无法实现接近真实的操作感觉、心理感受和生理适应性难题。
1 总体结构及布局
1.1 总体结构
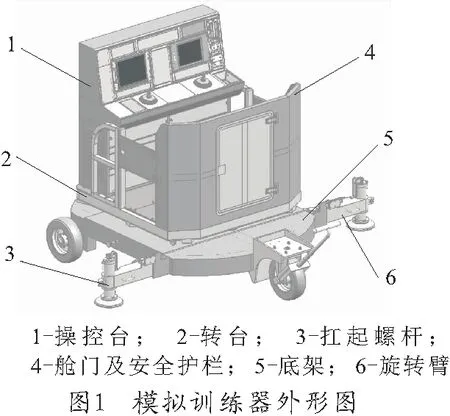
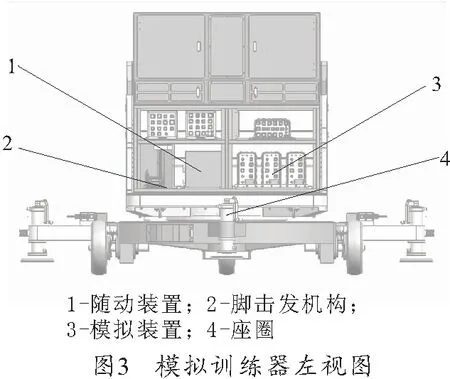
模拟训练器外形三维图如图1(正等侧视)、图2(俯视)和图3(左视)所示。它主要由下列部分组成:
1)底架:由主架、扛起螺杆、旋转臂、运动装置、牵引转向机构等组成。
2)转台:由转台座板、安全护栏、舱门等组成。
3)操控台:由架体、电气柜、操控盒、显示器、操纵杆等组成。
4)方向机:由机动传动箱、手动传动箱、手动/机动转换装置等组成。
5)随动装置:由驱动器箱、控制器箱、控制电源箱、受信仪等组成。
6)舱门及护栏:由舱门、安全护栏、舱门联锁装置组成。
7)模拟装置:主控仿真装置、光电模拟装置、雷达模拟装置等。
8)方位固定器:由手柄、微动开关等组成。
9)座圈:借用牵引37 mm高炮座圈。
10)座椅:选用制式座椅。
11)回转接触器:选用HZJ-20汇流环。
12)脚击发机构:借用35 mm自行高炮脚击发机构。

1.2 总体布局
总体布局关键是最大限度地接近自行高炮乘员舱操作环境,车长和炮手各自的操作要求与自行高炮相同。考虑到人的生理特征和操作空间范围,首先确定车长和炮手位置,其他装置布置均以操作者为中心[3]。车长位在左,炮手位在右,座椅布置在转台回转中心偏后180 mm,沿转台纵轴面对称布置,座椅中心距离为700 mm。操控台布置在转台正前方,距回转中心410 mm。舱门及安全护栏沿转台周边布置,用螺钉固定在转台上。方位固定器布置在炮手座椅右下方,脚击发机构布置在炮手座椅右前方。方向机安装在车长与炮手座椅中间位置,方向机主齿轮中心与转台回转中心相距468 mm。为使转台转动平衡,模拟装置和随动装置机箱全部安装在操控台电气柜中,回转接触器安装在底架上。
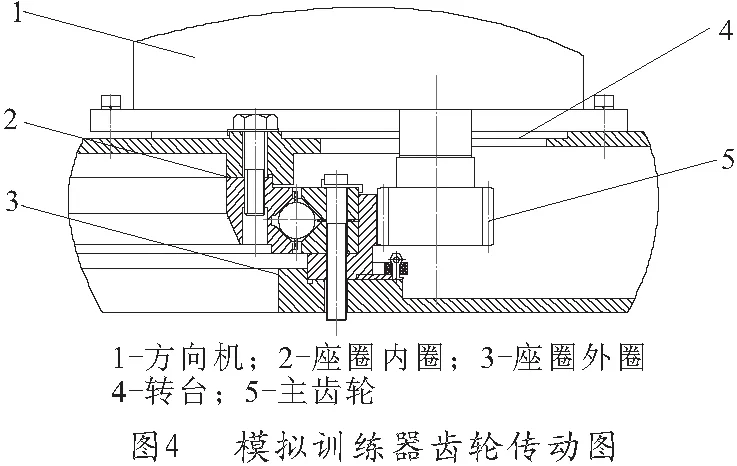
底架、座圈和转台是模拟训练器的主要部件,座圈是连接转台与底架的枢纽,也是转台实现回转的关键部件。安装形式为座圈外齿圈(不动件)用螺钉固定在底架装配面上,座圈内圈(转动件)固定在转台装配面上。方向机固定在转台上,其输出端主齿轮与外齿圈啮合,因此,当方向机主齿轮转动时,带动转台沿齿圈转动。如图4所示。
2 工作原理
模拟训练器系统启动进入 “战斗”状态后,由控制台进行训练方式和训练课目指定,同时进行模拟目标航路产生。雷达模拟装置搜索雷达对“目标”进行搜索,搜索到“目标”后,进行敌我识别,同时进行威胁度判断,通过导引将指定“目标”坐标发送给跟踪雷达模块、光电跟踪模块和随动系统。方向机在随动装置控制下,带动转台回转。模拟自行高炮将火炮身管和瞄准线指向“目标”,同时跟踪雷达模块或光电跟踪模块对“目标”实施截获和跟踪,必要时可以采用操纵杆对“目标”进行半自动跟踪。在光电跟踪方式下,光电模拟装置模拟炮手监视器显示画面,显示光电跟踪图形和目标信息。火控仿真模块模拟射击诸元解算,当“目标”进入有效射程之内,炮手适时对“目标”实施射击。
3 主要部件设计
3.1 底架
底架是模拟训练器的承载平台,相当于自行高炮的底盘。底架不仅承受整个转台重力,还要承受转台启动、停止和加速产生的惯性力矩。为保证模拟训练器回转时不产生晃动,3个扛起螺杆与地面产生的静摩擦力矩Mf必须大于惯性力矩Mg。在静摩擦力不变的条件下(模拟训练器总质量是常量),增大摩擦力臂是增强模拟训练器稳定的最有效措施。因此,在底架水平方向上,设计了两个可展开和收缩的旋转臂,旋转臂上各安装一个扛起螺杆,训练时,两旋转臂向外旋转90°,到位后自动锁紧,转动扛起螺杆手轮,使模拟训练器缓慢升起离开地面,所有重力由3个扛起螺杆承受。这样,增加了摩擦力矩,又不增大结构尺寸和质量,保证了模拟训练器的动态稳定性。为了满足功能要求,底架上还设计有牵引转向机构、制动器、运动装置,使模拟训练器具有一定的机动能力。
3.2 转台
在转台布局上,把操控台、舱门、安全护栏沿转台周边安装,构成了一个相当于半封闭的“炮塔”乘员舱。座椅、操控台、脚击发机构、方向机、方位固定器等相对位置、人机关系与主装备接近。从视觉、听觉、触觉和感觉方面,为学员营造了一个逼真的操作环境,使学员最大限度地得到接近真实的训练。
转台上安装了模拟训练器所有装置,是承受动载荷最大的转动部件。不但要有足够的刚度和强度,而且尽量使转动惯量最小,为此,在设计中采取的措施是:
1)在材料选用上,铝合金具有密度小,强度高,加工性能好等优点,是武器轻量化的首选轻质结构材料[4],所以转台上结构最复杂和质量最大的承载件—底座,采用ZL-104铸造铝合金,为了合理有效地使用材料,减轻质量,把铸件断面形状设计为U形空腔结构,在受力部位局部增加铸造筋,达到了减重效果。
2)在结构设计上,箱形整体结构、双层空腔结构方式是提高部件刚度和强度的有效方法[5]。因此把舱门及安全护栏,设计为双层箱形结构,采用1 mm薄钢板冲压拼焊形成。装配时把上述各部件用螺钉组装固定在转台上。
3.3 操控台
为了方便学员培训,操控台人机操作界面完全模拟自行高炮。从操控台面板布置、结构组成、操作顺序到操纵杆、显示器、按钮、开关、键盘、各种指示灯等硬件与自行高炮基本相同。因操控台为双人操作,布置的模块较多,因此,采用按功能分区方法,把操控台划分成17个独立单元,每个单元具有特定的功能和作用。在结构上,应用模块化、通用化设计方法,所有操控盒采用相同结构形式,把每个单元设计成单独“机箱”形式 ,既为操控盒又是构成操控台面板的一部分,每个操控盒用统一的不脱螺钉紧固在架体上。17个单元组装成一个完整的操作面板,这样各单元安装拆卸互不影响,维修十分方便。操控盒采用铝合金铸造后,经机械加工而成,外形精美漂亮。操控台电气柜需容纳较多的机箱,采用空心型钢和薄钢板组焊而成,机柜内设计有导轨、定位、锁紧机构,用来安装和固定机箱。为能承受使用和运输过程产生的冲击与振动,操控台采用整体减振方式,通过8个EA40减震器与转台浮动连接,达到了较好的减振效果。
3.4 方向机
方向机是驱动转台回转运动的传动装置。方向机由机动传动箱和手动传动箱构成,可以实现手动/机动转换。手动传动箱安装在机动传动箱的上部,手动/机动转换是通过1个滑动联轴器、1个限位开关和1个转换手柄完成。跟踪速度0.05~70(°)/s,、最大跟踪加速度60(°)/s2等参数与主炮相同。为使结构紧凑轻便,方向机机动传动采用塔形齿轮结构,经四级直齿圆柱齿轮减速,方位电机功率为2.2 kW。为满足传动平稳性和传动误差要求,齿轮精度选为6级。手动传动由一级直齿锥齿轮与两级直齿圆柱齿轮构成。方向机安装在转台底座上,用定位销和螺钉固定。
4 模拟训练器设计特点
模拟训练器的设计特点有:
1)小型化、轻量化。随着现代战争的发展,武器装备的小型化、轻量化技术越来越受到人们的重视。为了满足战技指标,在结构设计中,首先利用虚拟样机技术,完成模拟训练器的虚拟装配,由此计算出全部质量、转动惯量、质心位置,并进行有限元力学分析,依据计算结果,对设计方案和技术参数不断调整、优化;其次在设计上采用箱形、双层空腔结构形式;最后在材料上选用轻质结构材料,达到了小型化、轻量化。
2)逼真的操作环境,真实的操作感觉。以往的自行高炮模拟训练器均为桌面式,学员在静态下操作训练,无法体验真实的操作感觉。动态模拟训练器在仿真软件模拟目标、背景、截获、跟踪和射击等作战画面和转台回转声响配合下,从视觉、听觉、触觉和感觉方面,为学员营造了一个逼真的操作环境,增强了学员操作训练兴趣,解决了学员在以往桌面式模拟训练器上无法体验接近真实的操作感觉、心理感受和生理适应性难题,提高了训练效率。
3)综合集成。以往的桌面式自行高炮模拟训练器,各装置安装在桌面上,不仅拆装、包装、运输麻烦,而且装备档次和品位低。依据战技指标和功能要求,参考国内外装甲兵类似产品,采用综合集成设计方法和总体结构技术,把各部件有机地集成为一台产品,使装配、测试、运输方便。
4)操作宜人,维修方便,安全防护装置齐全。从勤务方面看,对模拟训练器的要求是性能稳定可靠、操作安全、维修方便。操作性影响装备效能的发挥,可靠性与维修性直接关系到装备性能的实现。因此,在总体布局设计时,充分考虑了操作者的心理和生理特征及维修保养的可达性。利用虚拟技术对可操作性作了验证,从而保证了操作性。各单体采用模块化、通用化设计,在转台及底架设计有维修窗口、测试口、观察窗口,机箱、电缆、插座一律朝外,便于维修。舱门和方位固定器设计有电气联锁装置,扛起螺杆设计有锁紧机构,运动装置设计有制动器,确保训练和运输过程人员和产品的安全。
5)创新、实用、结构造型新颖。桌面式模拟训练器已在高炮武器系统中广泛应用,但动态模拟训练器在国内尚属应用首例。因此动态模拟训练器具有创新、实用、结构造型新颖等特点。
5 结束语
动态模拟训练器经使用试验,通过对模拟空中目标实施搜索、截获、导引、跟踪、射击,车长和炮手协同操作训练及可靠性考核试验,产品性能满足战技指标和使用要求,模拟训练器运行正常。该模拟训练器为主装备尽快形成战斗力,提供了有力的技术保障。
动态模拟训练器性能满足战技指标要求,能够完成自行高炮的各项科目训练,具有较强的综合训练能力和一定的创新实用性。并具有功能齐全、安全可靠、运输及维修方便等特点。动态模拟训练器的成功研制,为后续研发新型号自行高炮模拟训练器的研制奠定了基础,具有一定的参考和推广价值。
参考文献(References)
[1] 马春茂,陈熙,侯凯,等.弹炮结合防空武器系统总体设计[M].北京:国防工业出版社,2008.
MA Chun-mao,CHEN Xi,HOU Kai,et al. Overall design in gun/missile integrated air defense weapon system[M].Beijing:National Defence Industry Press,2008.(in Chinese)
[2] 朱竞夫.装甲兵作战模拟机训练装备综述[J].现代军事,2005(12).
ZHU Jing-fu.Survey of combat campaign training equipment for armored forces[J]. Modern Military, 2005(12).(in Chinese)
[3] 丁玉兰.人机工程学[M].北京:北京理工大学出版社,2004:81-151.
DING Yu-lan. Mn-Machine Engineering[M].Beijing:Beijing Institute of Technology Press, 2004:81-151.(in Chinese)
[4] 潘玉田主编.轮式自行火炮总体技术[M]. 北京:北京理工大学出版社,2009:30-32.
PAN Yu-tian. General technologies of Wheeled Self-Propelled Gun[M].Beijing:Beijing Institute of Technology Press, 2009:30-32.(in Chinese)
[5] 于惠力.机械零件设计禁忌[M]. 北京:机械工业出版社,2006:57-66.
YU Hui-li. Design taboos of mechanical parts[M].Beijing:China Machine Press, 2006:57-66.(in Chinese)
猜你喜欢
机械设计与制造(2022年5期)2022-05-19 03:34:34
黑龙江气象(2021年2期)2021-11-05 07:07:06
装备制造技术(2020年1期)2020-12-25 05:20:04
军事文摘(2020年15期)2020-08-15 08:54:52
专用汽车(2020年3期)2020-04-07 12:32:38
金属加工(热加工)(2020年12期)2020-02-06 05:59:06
现代兵器(2017年4期)2017-06-02 15:58:14
新时代职业教育(2016年2期)2016-02-06 02:29:55
生物医学工程学进展(2015年1期)2015-02-28 14:53:40
客车技术与研究(2014年6期)2014-02-28 08:48:33
