
三维激光扫描用于获取开采沉陷盆地研究
2012-11-15 08:43:28陈冉丽
测绘工程 2012年3期
陈冉丽,吴 侃
(1.石家庄铁路职业技术学院 测绘工程系,河北 石家庄050041;2.中国矿业大学 环境与测绘学院,江苏 徐州221008)
三维激光扫描用于获取开采沉陷盆地研究
陈冉丽1,吴 侃2
(1.石家庄铁路职业技术学院 测绘工程系,河北 石家庄050041;2.中国矿业大学 环境与测绘学院,江苏 徐州221008)
针对常规地表观测站需要布设大量的测点,占用农田、测点保护困难等缺点,提出采用三维激光扫描获取开采沉陷盆地的新思路。研究三维激光扫描获取开采沉陷盆地的原理、数据处理步骤和方法,并选择了某矿工作面做一个实测案例研究。研究结果表明,该方法能达到较高的精度,具有工程应用价值。
三维激光扫描;沉陷盆地;点云数据
三维激光扫描技术是国际上近期发展的一项高新技术[1]。利用三维激光扫描技术,可以深入到任何复杂的现场环境及空间中进行扫描,并可以直接实现各种实体或实景三维数据完整的采集,进而快速重构出实体目标的三维模型。同时,还可对采集的三维激光点云数据进行各种后处理分析,如测绘、计量、分析、模拟、展示、监测、虚拟现实等操作。
同传统的测量手段相比,三维激光扫描技术可大范围、快速、全面、高精度、高分辨率地获取被测物体的平面和高程坐标,便于建立可量测的三维模型。综合起来,激光测量具有很多优势和特点[2]。
地面三维激光扫描技术作为正向建模的对称应用,获取的数据可以直接与地理空间信息库连接,可作为高精度GIS数据源。该技术在建筑物三维重建,考古测量建档、存档,采矿业的地下勘测等不可接触的实物测量方面有着广泛的应用前景。国外已将这一先进技术用于空对地观测及工业测量系统,以快速获取特定目标的立体模型[3]。国内,激光扫描技术也得到了一定的研究。本文基于三维激光扫描技术的特点,对其应用于开采沉陷盆地的获取做了详细研究。
1 监测开采沉陷盆地的传统方法
要保护井巷、建筑物、水体及铁路等,使它们免受或少受开采的有害影响,减少地下资源的损失,必须研究地下开采引起的岩层和地表移动规律。岩层和地表移动的过程十分复杂,它是许多地质采矿因素综合影响的结果。认识岩层与地表移动这一复杂过程,目前的主要方法是实地观测[4-6]。
为了进行实地观测,必须在开采进行之前,在选定的地点进行开采沉陷观测站。所谓观测站,是指在开采影响范围内的地表、岩层内部或其它研究对象上,按一定要求设置的一系列相互联系的观测点。随着多年开采沉陷观测经验的积累和科学技术的发展,开采沉陷观测站的类型越来越多,其中,按布站形式的不同可分为剖面线状观测站和网格状观测站[4,7]。
1.1 剖面线状观测站
剖面线状观测站是目前各矿区用得较多的一种布站形式,它是选择在特定方向上布点成直线形。若因条件限制不能布成直线时,可设少量转点而成折线形。所谓特定方向是,指沿移动盆地主断面的方向。沿走向主断面布设的观测线称为走向观测线,沿倾斜主断面布设的观测线称为倾斜观测线。
观测站通常有两条相互垂直且相交的观测线(即一条或半条走向观测线,一条或半条倾向观测线)所组成(见图1)。在地表达到充分采动的条件下,通过移动盆地的平底部分都可设置成观测线;在地表未达到充分采动的条件下,观测线需设在移动盆地的主断面上。
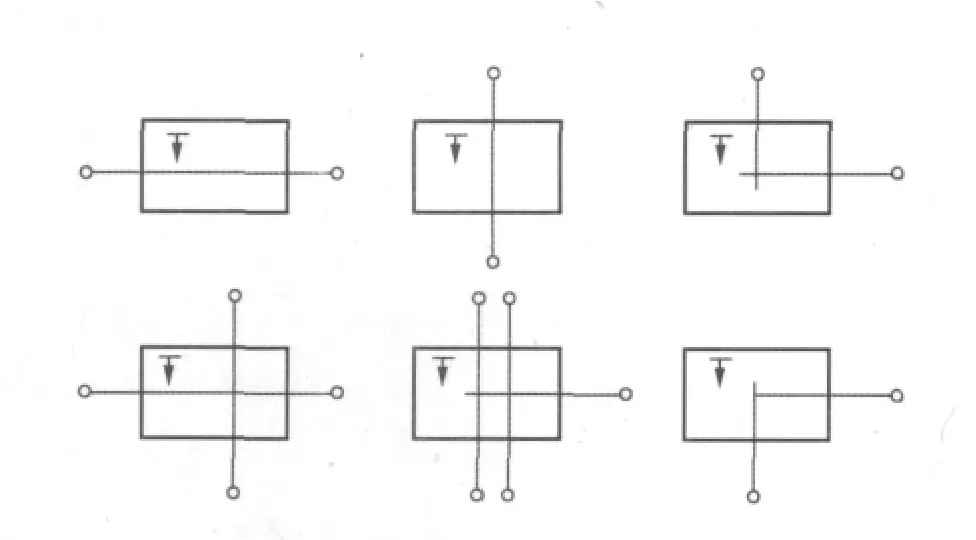
图1 剖面线状观测站布设形式示意图
1.2 网格状观测站
在产状复杂的煤层或在建筑物密集的地区开采时,可考虑多布设一些测点,组成网状观测站(见图2)。网状观测站可观测整个采动范围,所得资料比较全面、准确。我国在河南平顶山矿务局和山东枣庄局的柴里矿曾设置过网状观测站。

图2 网状观测站布设示意图
1.3 存在的缺点
传统的观测站布设形式存在着如下缺点:
1)需要布置固定测点,观测站的建立投入大、观测周期长,且测点不容易保护易缺失。
2)剖面线状观测站由于测点数目有限,仅布设于特定方向上,因此,观测所得资料只反映观测线所在断面上的移动和变形的分布大小,不能很好地描述整个沉陷盆地的状况。
3)网状观测站虽可观测整个采动范围,但由于测点数目较多,野外观测和室内成果整理工作量大,且受地形、地物条件的限制,所以只在研究专门问题时采用。
2 地面三维激光扫描观测站
2.1 三维激光扫描原理
地面三维激光扫描系统由三维激光扫描仪、数码相机、扫描仪旋转平台、软件控制平台、数据处理平台及电源和其它附件设备共同构成,是一种集成多种高新技术的新型空间信息数据获取手段。地面三维激光扫描系统的工作原理如图3所示,首先由激光脉冲二极管发射出激光脉冲信号,经过旋转棱镜,射向目标,然后通过探测器,接收反射回来的激光脉冲信号,并由记录器记录,最后转换成能够直接识别处理的数据信息,经过软件处理实现实体建模输出[8]。

图3 三维激光扫描原理
2.2 三维激光扫描获取开采沉陷盆地原理
利用三维激光扫描仪获取沉陷盆地原理如图4所示。当工作面推进到位置1时,用三维激光扫描仪观测一次地表,拟合后可以得到当时的数字地面模型DEM1;当工作面推进到位置2时,再用三维激光扫描仪对同一位置地表进行第二次扫描,获得这个时候地表的数字地面模型DEM2;用DEM1减去DEM2,可以得到监测区域的地表下沉值。再结合井下开采情况,对地面整个沉陷区进行扫描,便可获取开采区域地表的沉陷盆地。
2.3 数据处理
当完成对开采沉陷区域的扫描后,获取的是大量的点云数据,需要对其进行一系列的处理,主要包括以下几个方面[9-10]:
1)裁剪:对于比较明显且容易删除的干扰地物,进行人工的裁剪,以免对后面的粗差剔除造成干扰,

图4 用三维激光扫描仪监测沉陷盆地示意图并且可减少数据量,方便处理。
2)采样:点云密度根据物体到扫描仪的距离长短而异,得到的点云数据是不均匀的,尤其是扫描地表的数据,疏密程度差别较大,在数据处理前一定要先进行采样。要求采样密度基本和测区内比较稀疏位置的点云密度相吻合,使得采出来的点云基本做到均匀分布。
3)粗差剔除:由于矿区地表通常为土地,地面不平整,还会有一些植被或杂草,剔除时应在保持原始地形的情况下尽量将所有非地形点去除。
4)建模:使用处理过的点云数据生成数字高程模型DEM,并根据要求生成一定密度的格网点,用DEM内插出格网点的高程,两次或多次高程值求差,得到下沉值。
3 实例分析
本次采用Trimble GX200三维激光扫描仪,对某一个沉陷盆地进行扫描,共进行2次独立的扫描,由于该区域下面的采区正在进行开采,地表沉陷比较剧烈,因此,两次扫描之间的时间间隔大约为25 d。虽然沉陷盆地范围比较大,但为了获得准确的点云信息,采用较高的采样密度,采样间隔为50 mm。最终获得沉陷盆地两次扫描的点云数据,如图5和图6所示。

图5 沉陷盆地第一次扫描点云数据

图6 沉陷盆地第二次扫描点云数据
把两次扫描的点云数据叠加到一起,通过相应的软件进行分析,就可以直观地得到两次扫描地表变化的情况,如图7所示。从图7可以看出沉陷盆地整个区域内由于地下开采引起的地表下沉变化情况,同时可以得到下沉等值线图,如图8所示。
从实验结果可以看出,三维激光扫描技术可以很好地应用到矿区沉陷盆地的变形监测,该技术改变了以往以线盖面的监测方法,而是从整体上全面地对沉陷盆地进行扫描监测,进而可以得到整个盆地的变形情况,对于工程应用具有实际意义。

4 结 论
1)传统沉陷盆地的获取方式需要埋设测点,并布设成剖面线状或网状形式,投入大,观测周期长,测点不易保护。剖面线状观测站所测资料只反映观测线所在断面上的移动和变形的分布大小,不能很好地描述整个沉陷盆地的状况;网状观测站由于测点数目较多,野外观测和室内成果整理工作量大。
2)理论上应用三维激光扫描测量系统对开采沉陷引起的地表移动进行观测,可较快地获得整个区域的空间位置及垂直相对位置的变化,从而确定整个地表移动区域的下沉情况。
3)具体实例表明,应用三维激光扫描仪对沉陷区域进行连续两次扫描,将获取的点云数据进行处理后生成数字高程模型DEM,两次观测得到的DEM模型相减,可得到整个区域对应任意坐标的下沉值。应用所得下沉值即可获取开采区域的沉陷盆地。
4)应用三维激光扫描技术获取沉陷盆地沉降数据具有快速灵活的特点,不需要固定测点、节约成本、时间短,提高效率的同时还可获得丰富的观测数据,相当于一个高密度的网状观测站,为开采沉陷的研究提供了更为全面的实测数据。
[1]宋宏.地面三维激光扫描测量技术及其应用分析[J].测绘技术装备,2008,10(2):40-43.
[2]马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[3]罗德安,朱光,陆立,等.基于3维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.
[4]何国清,杨伦,凌庚娣,等.矿山开采沉陷学[M].北京:中国矿业大学出版社,1994.
[5]张舒,吴侃,王响雷,等.三维激光扫描技术在沉陷监测中应用问题探讨[J].煤炭科学技术,2008,36(11):92-95.
[6]赵兵朝,赵国梁,李瑞斌.全站仪在开采沉陷三维相似模拟实验中的应用[J].西安科技大学学报,2007,27(1):35-38.
[7]于远洋,谷拴成,朱彬.开采沉陷地表移动规律初探[J].西安科技大学学报,2007,27(1):11-14.
[8]马立广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005(3):60-62.
[9]赵晓明,洪波.三维激光扫描仪应用技术研究[J].价值工程,2010,29(9):236.
[10]于启升,吴侃,郑汝育.利用三维激光扫描数据求取开采沉陷预计参数研究[J].地矿测绘,2010,26(2):1-3.
Research and application of 3D laser scanning to subsidence basin
CHEN Ran-li1,WU Kan2
(1.Department of Geomatics Engineering,Shijiazhuang Institute of Railway Technology,Shijiazhuang 050041,China;2.School of Environment Science and Spatial Informatics,China University of Mining &Technology,Xuzhou 221008,China)
Traditional observation station sets up fixed points and occupies farmland and has difficulties to protect those points.A new way of using 3D laser scanning to get subsidence basin was presented.It introduces the principle of using 3D Laser Scanner to get subsidence basin and the processing of point cloud date in the thesis.It makes a detailed study on getting the subsidence basin,and analysis has been carried out through experiments and has achieved good results.
3D Laser Scanner;subsidence basin;point cloud data
TU196
A
1006-7949(2012)03-0067-04
2011-06-22
陈冉丽(1982-),女,硕士.
[责任编辑张德福]
猜你喜欢
山西冶金(2023年11期)2024-01-07 13:44:52
科学技术创新(2023年22期)2023-09-21 08:17:16
舰船电子对抗(2022年6期)2022-12-25 12:41:40
科学导报(2022年39期)2022-07-04 23:15:46
航空学报(2017年5期)2017-11-20 03:44:46
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
山西大同大学学报(自然科学版)(2014年6期)2014-01-23 02:00:32
现代营销·经营版(2013年5期)2013-05-14 14:55:04
警察技术(2013年1期)2013-03-20 14:11:22
