
基于SGM的遥感影像自动匹配
2012-11-14 10:52申二华范大昭汤志强刘楚斌
测绘通报 2012年6期
申二华,范大昭,汤志强,2,刘楚斌
(1.信息工程大学测绘学院,河南郑州450052;2.96633部队,北京100096)
基于SGM的遥感影像自动匹配
申二华1,范大昭1,汤志强1,2,刘楚斌1
(1.信息工程大学测绘学院,河南郑州450052;2.96633部队,北京100096)
遥感影像的自动匹配是数字摄影测量产品生产的重要过程,匹配结果的好坏直接影响摄影测量产品的质量。将计算机视觉中SGM算法应用于遥感影像的自动匹配问题中,对航天和航空遥感影像在城市地区、阴影区域及纹理特征不明显的情况下进行的大量试验表明,该方法具有稳定、可靠的特点。
SGM;遥感影像;自动匹配;互信息
一、引 言
匹配策略大体上可分为局部算法和整体算法两大类。局部算法,如区域匹配(area-matching or block matching)计算视差主要是由左影像中心像素和周围相邻像素的信息和右影像对应的区域块在一定的准则下比较得到的。局部算法较为简单,但有3种缺点:①在重复特征区域很容易出现错误处理;②对于噪声非常敏感;③在目标边缘处易造成膨胀现象。整体匹配算法通过全局约束的能量最小化算法生成影像视差图,如Graph Cuts[1]、Belief Propagation[2]。整体匹配算法较局部算法在稳定性、可靠性方面有着较大的优势,然而获取视差影像却需要付出高昂的计算代价。
SIFT[3](scale invariant feature transform)算子由于其特征对图像的尺度变化和旋转是不变量,而且对光照的变化和图像变形具有较强的适应性,因此近年来取得了广泛的应用。但由于它是在提取特征的基础上完成的,因此在某些情况下不可避免地会造成匹配点的不均匀或是不足够。
SGM(semi-global matching)是一种产生在计算机视觉领域的影像匹配算法,它很好地解决了以上算法的各种缺点,并利用互信息描述同名像点之间复杂的对应关系。该算法的基本思想是:首先基于互信息执行逐像素代价计算;然后利用多个方向上的一维约束近似二维约束。本文最后给出了在城市地区、阴影区域和特征不明显区域的匹配试验结果。
二、SGM匹配算法[4-5]
1.匹配准则
SGM算法是以互信息MI1,2为基础的,它是通过两张影像的信息阈H及其联合信息阈H1,2来定义的,其中

对于单张影像,其信息阈H可以通过直方图描绘的概率分布计算。联合信息阈H1,2可以通过互匹配影像灰度的联合概率分布来计算。
利用泰勒展开式,可以将H1,2转化为一系列数据之和。即

式中,p为任意像点;d为其与同名像点的视差。
基于互信息的匹配代价可得到如下定义

2.匹配准则的优化
对于像素p,其匹配代价设为S(p,d),影像视差d的计算是通过对所有一维方向上的最小代价路径求和而得(路径在p点结束,且视差为d)。
假设Lr是方向r上的路径。像素p在视差为d时的代价Lr(p,d)通过递归的方式定义为

路径数最小是8,为了对二维影像有很好的覆盖,路径数应是16。

三、基于SGM的遥感影像匹配方法
1.逐像素匹配计算[1]
函数d(xi,yi,IL,IR)定义了两点有多大可能性是同名像点

式中,xi和yi分别是左右扫描线上的像点。左扫描线上点x处的灰度定义为IL(x);IR则是通过右扫描线上的采样点线性内插得到的。
因为分段线性函数的极值点一定是断点,因此视差d的计算非常容易。如图1所示,首先计算yi和左临近点yi-1的中点

同样的,计算yi和右临近点yi+1的中点


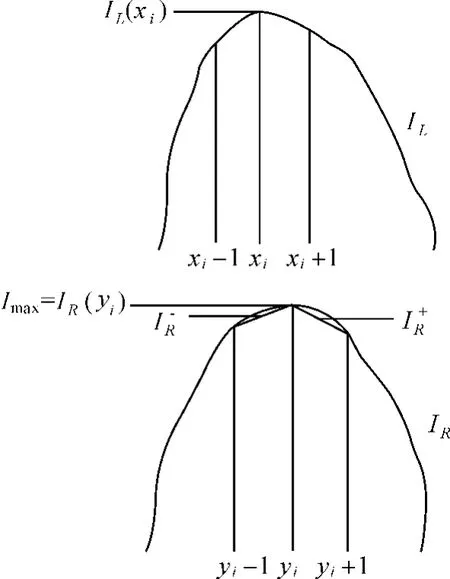
图1 d(xi,yi,IL,IR)的定义
2.用一维约束近似二维约束
如图2所示,在P的周围,以45°为间隔设置了8个路径。通过8个路径计算最小代价路径Lr(p,d),以此来近似二维约束匹配计算。
3.视差计算
视差计算是通过迭代的方式得到的。首先用随机的视差影像来纠正右影像,然后进行匹配,生成新的视差影像。本文使用了一种分等级的计算方法,它首先在半分辨率的情况下计算出视差影像作为初始值,然后递归地利用得到的视差影像进行计算。

图2 路径设置
4.误匹配的剔除
左右影像同名点匹配完成后,利用右影像中的点去匹配左影像中的同名点。如果两次匹配得到的视差不相同,则视为无效匹配。
四、试验结果与分析
该部分给出航空影像匹配的试验结果,以检验本文匹配算法的可行性。本文主要通过目视对结果进行主观评价,其中未指明算法的匹配结果所用算法均为本文中的算法。图3为两张核线航空影像的匹配结果,其中格网长度为30个像素。如图3所示,在试验的参考点中,只有一个点因为没有找到有效的匹配点而未正确显示出来。通过这次试验,可以看出该方法有着很高的匹配成功率。

图3 航空影像的匹配结果
图4为SIFT算子的匹配结果图,相对于图3,可以看出在特征不明显的地方,SIFT算子的匹配点很稀少,这对于DSM的生成、三维重建等应用是很不利的,而本文中的方法在特征不明显的区域也有着很好的匹配结果。
图5是本文算法在城区的匹配结果;图6是基于相关系数的金字塔匹配算法(金字塔层数为3层,缩放比例为3×3,每层相关系数均设为0.8,否则会被认为是无效匹配)在城区的匹配结果。从图5、图6中可以看出,无论是在建筑的边缘(如图7所示),还是在阴影部分(如图8所示),亦或是在纹理特征较为缺乏的房顶等区域(如图9所示),本文算法都有着不错的匹配结果。通过试验可以看出该方法对同名点之间复杂的对应关系有着很强的判别能力(其中图7、图8、图9为图5、图6中的局部截图,左立体像对所用方法为本文算法,右立体像对所用方法为基于相关系数的金字塔匹配算法。)。

图4 SIFT算子的匹配结果

图5 城区的匹配结果

图6 基于相关系数的金字塔城区匹配结果

图7 建筑边缘匹配结果对比图

图8 阴影区域匹结果对比图
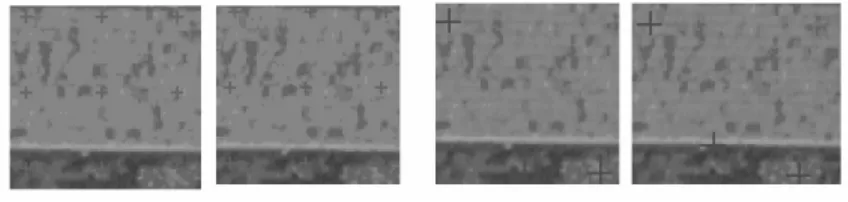
图9 屋顶纹理特征贫乏区域匹配结果对比图
五、结束语
本文引入了一种对于城市地区、阴影区域和纹理特征不明显区域都有着稳定可靠的匹配结果的算法。试验结果表明,此影像匹配算法相对于相关系数法等局部算法在匹配准确度方面有了质的提升,较之整体算法有着更高的执行效率,在阴影区域和纹理特征不明显的区域,较其他算法也有着明显的优势。
[1] BOYKOV Y,VEKSLER O,ZABIN R.Efficient Approximate Energy Minimization via Graph Cuts[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2001,23(11):1222-1239.
[2] SUN J,SHUN H Y,ZHENG N N.Stereo Matching Using Belief Propagation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(7): 787-800.
[3] 李晓明,郑链,胡战,等.基于SIFT特征的遥感影像自动配准[J].遥感学报,2006,10(6):885-892.
[4] HIRSCHMULLER H.Accurate and Efficient Stereo Processing by Semi-global Matching and Mutual Information[C]∥IEEE Conference on CVPR.San Diego:[s.n.],2005:807-814.
[5] HIRSCHMULLER H.Stereo Processing by Semi-global Matching and Mutual Information[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2008,30(2):328-341.
[6] GEHRKE S,MORIN K.Semi-global Matching:An Alternative to LIDAR for DSM Generation[C]∥IEEE Conference on CVPR.Miami:[s.n,],2009.
[7] BIRCHFIELD S,TOMASI C.Depth Discontinuities by Pixel-to-Pixel Stereo[C]∥Proceedings of the Sixth IEEE International Conference on Computer Vision.Mumbai:[s.n.],1998:1073-1080.
[8] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1995.
SGM Based Automatic Registration of Remote-sensed Imagery
SHEN Erhua,FAN Dazhao,TANG Zhiqiang,LIU Chubin
0494-0911(2012)06-0031-03
P237
B
2011-06-28
国家自然科学基金(40901230);教育部博士后科研基金资助项目(20080440234)
申二华(1988—),男,河南许昌人,硕士生,主要研究方向为摄影测量与遥感影像匹配理论。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
小型微型计算机系统(2022年1期)2022-01-21
红领巾·萌芽(2019年8期)2019-08-27
天津大学学报(自然科学与工程技术版)(2018年6期)2018-05-30
中国与非洲(法文版)(2017年10期)2017-11-23
现代计算机(2016年3期)2016-09-23
CHIP新电脑(2016年3期)2016-03-10
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
西北工业大学学报(2015年4期)2016-01-19
西部广播电视(2015年5期)2016-01-16
