
基于改进下垂控制的微网运行控制策略
2012-11-09 11:13徐瑞林郑永伟陈民铀
电力系统及其自动化学报 2012年6期
徐瑞林, 徐 鑫, 郑永伟, 陈民铀, 李 闯
(1.重庆市电力公司电力科学研究院, 重庆 401123;2.重庆大学输配电装备及系统安全与新技术国家重点实验室, 重庆 400044)
基于改进下垂控制的微网运行控制策略
徐瑞林1, 徐 鑫1, 郑永伟2, 陈民铀2, 李 闯2
(1.重庆市电力公司电力科学研究院, 重庆 401123;2.重庆大学输配电装备及系统安全与新技术国家重点实验室, 重庆 400044)
针对传统下垂控制器在微网并网模式运行时受电网频率或电压幅值波动的影响,难以实现恒功率输出的问题,提出了一种动态调节下垂系数实现恒功率输出的控制策略。同时为平抑微网孤岛模式运行时因连网线路阻抗不同而产生的环流设计了无功环流抑制单元。此外,为了保证微网在运行模式切换时平滑过渡而设计了预同步控制器。所提出的控制策略通过Matlab/Simulink仿真平台验证了其正确性和可行性。
微网; 孤岛模式; 并网模式; 平滑切换; 下垂控制
随着石油和煤炭等能源价格的不断上涨,世界各国不得不应对能源危机带来的挑战[1]。分布式发电具有许多优点,因此受到越来越多的关注。常见的分布式发电DG(distributed generator)技术包括风力发电、太阳能光伏发电、小水电、柴油发电机、燃料电池、微型燃料汽轮机、生物质能发电、地热发电、海洋能发电及各种储能技术[2]。微电网的提出有效解决了各种分布式电源接入电网的影响,并提供高效、安全、可靠的电能供应[3]。
微网具有两种典型的运行模式,即并网模式和孤岛模式。两种模式间平滑切换是保证微网安全过渡的关键。文献[4]提出了多台不同容量的逆变器并联运行时,通过合理设置下垂系数实现环流抑制,但没有考虑连接线路阻抗不同而产生的环流的抑制。文献[5]提出了双模式逆变器,在孤岛运行时采用V/f控制,在并网运行时采用PQ控制,虽符合微网运行的需求,但前者属于电压控制,后者属于电流控制,两者的切换难度大,易导致切换失败。文献[6,7]设计了基于下垂特性的控制器,在两种运行模式下都采用下垂控制,并网运行时会因电网电压幅值和频率偏离额定值导致分布式发电不能工作于额定运行状态,降低分布式能源的利用率。
本文在传统下垂控制器的基础上,首先添加了无功环流抑制单元以平抑微网孤岛模式运行时因连网线路阻抗不同而产生环流;其次,增加了下垂系数动态调节单元,使得微网在并网运行时下垂特性曲线的下垂系数能根据电网电压幅值或频率的波动进行动态调节,实现微网在两种运行模式间平滑切换且在并网运行模式时能按照调度指令保持输出功率恒定;再次,为了保证微网在运行模式切换时平滑过渡,设计了预同步控制器。最后通过Matlab/Sinmulink仿真平台对所提出的控制策略进行仿真验证。
1 微网结构
DG构成的微网与配电网连接示意图如图1所示,微网中控制系统MGCCS(micro-grid central control system)通过信号线(虚线)控制各断路器(CB、CB1、CB2)。由图1可知,微网由DG、逆变器、储能设备、断路器、负载、母线、线路构成,根据负载的重要程度接在不同的母线上。DG具有随机性,一般要求配备储能装置向负载提供高质量电能,因此DG需要通过逆变器才能与常规配电网连接。本文主要研究逆变器的控制策略,为了简化分析,假定逆变器直流侧电压已通过相应的控制策略保持恒定,分析中用理想直流电压源等效。
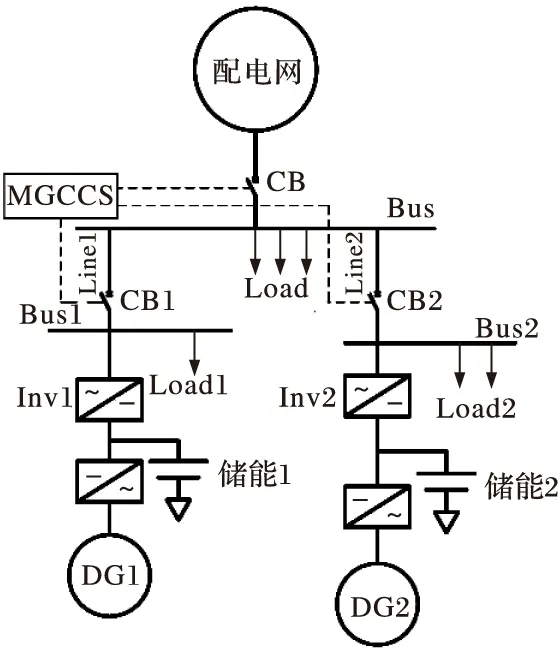
图1 微网与配电网连接示意图
2 控制系统设计
2.1 孤岛V/f下垂控制器设计
在低压配电网中,线路传输的有功功率P主要取决于线路两端的电压差U1-U2,而无功功率Q则主要取决于线路两端电压的相位差δ[8]。文中采用LCL低通滤波器滤除SVPWM逆变器产生的高次谐波,受滤波器对功率传输特性的影响,采用的下垂控制方程[9]如下:
(1)
式中:U*和ω*分别为空载电压和空载角频率;n1、m1为孤岛下垂系数;U、Q、ω、P为运行参量。
当微网孤岛运行时,由于DG逆变器与母线间的线路长度各不相同,可能会在线路中产生环流,如不加环流抑制单元会增大线路损耗,甚至造成逆变器损坏。根据文献[10]对逆变器并联系统环流特性的分析,得知线路压降不等是产生无功环流的根本原因。为抑制环流,本文根据线路阻抗和流过线路的功率设计了无功环流抑制环节,其线路压降计算公式[11]如下:
(2)
式中:Pline、Qline分别是流过线路的有功功率和无功功率;R、X分别是线路的电阻值和电抗值。利用测得的始端功率和始端电压根据式(2)计算出线路压降ΔUline加到空载电压U*,使得逆变器输出电压升高,抵消连接线路电压降,实现两线路末端电位相等(在并联处断开时,两端电压差为零),从而抑制无功环流。
2.2 并网PQ下垂控制器设计
配电网容量相对于分布式电源容量可视为无穷大,当并网运行后,微网电压和频率都随着配电网电压和频率的变化而变化。为了提高分布式能源的利用率,希望分布式电源能够不受配电网电压和频率波动的影响而采用PQ控制方式保持输出功率恒定。本文通过动态调节下垂系数实现分布式电源输出功率恒定。现以图2(a)为例介绍其基本原理如下:当配电网受到干扰使电压幅值增大时,逆变器运行点由a变到b使得DG输出的无功功率Q减小,通过动态调节单元减小U/Q下垂系数n使逆变器从工作于下垂曲线1切换到工作于下垂曲线2,即运行点从b变到c,此时DG输出的无功功率返回到原来的值Q1,从而实现了恒无功功率输出。同理也可以分析配电网频率发生变化时,通过动态调节P/ω下垂系数使有功功率输出恒定。

图2 下垂特性
根据式(1),可以推出并网运行时动态调节下垂系数的计算公式如下:
(3)
式中:Ugrid、ωgrid为配电网实际运行时的电压和角频率;n2、m2为动态调节的下垂系数,能够跟随Ugrid、ωgrid的变化而动态调节以实现额定功率输出;Pn、Qn为额定功率,也可以为调度功率。
当微网并网运行时,把下垂系数n1、m1切换为能动态调节的下垂系数n2、m2,即并网时采用的下垂控制方程如下:
(4)
当Ugrid增大时,Q小于Qn,根据式(3)动态减小n2,逆变器参考电压U增大,使得逆变器输出功率Q增大,当Q不等于Qn时,逆变器参考电压U继续增大,直到Q=Qn时,参考电压U=Ugrid,从而实现输出无功功率恒定。反之则亦然。
当ωgrid减小时,P大于Pn,根据式(3)动态增大m2,逆变器参考角频率减小,功率角δ也相应地减小,使得逆变器输出有功功率P减小,直到P=Pn时,逆变器参考角频率ω=ωgrid,实现有功功率恒定。
2.3 预同步控制器设计
微网并网过程需要解决的问题是如何运行DG,并将其很好地接入到当地配电网。要实现微网与配电网并网运行,则要求两者有相同的频率、电压幅值和相位。预同步并网控制器就是对该幅值、相位和频率进行检测并控制在可接受的范围内[12]。本文设计的预同步控制器根据并网点的电压信号,计算出电压相位差和幅值差,再根据并网点的位置分别送入相应的DG逆变器控制器,分别采用压差控制技术和锁相环(PLL)技术[13],使并网点满足并网运行条件。现以微网与配电网间的断路器CB为例进行说明,其预同步控制器结构示意图如图3所示。
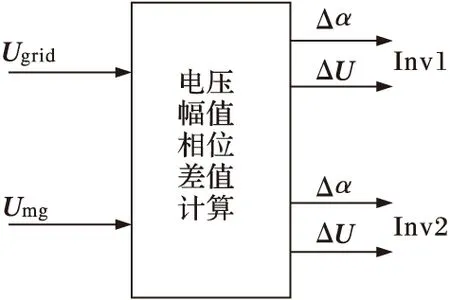
图3 预同步控制器结构
在图3中,配电网电压Ugrid和微网电压Umg经幅值和相位计算单元分别求出其两者的差值,再将差值分别送入DG1和DG2逆变器控制器,当两者小于并网运行条件设定值时,发出断路器CB合闸指令,断路器CB合闸操作,从而微网与配电网并网运行。这种控制策略减少了接于微网母线负载的停电时间,提高了微网的可靠性。
经过前面三点改进后的下垂控制器结构示意图如图4所示。开关S1、S2、S3根据微网的运行模式接入不同环节。S1接入不同的下垂系数,当微网孤岛运行时,S1接入m1、n1;当微网并网运行时,S1接入动态调节的下垂系数m2、n2。S2投切预同步控制单元,当逆变器从孤岛到并网运行模式切换时,才闭合S2;当并网完成后,S2断开。S3投切环流抑制单元,只有当逆变器孤岛运行时,S3闭合,其余时间都处于断开状态。
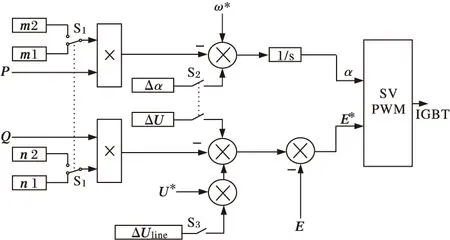
图4 改进的下垂控制器结构
3 算例仿真分析
针对本文提出的对传统下垂控制器的三点改进,利用Matlab/Simulink仿真软件对微网孤岛运行时无功环流的抑制、微网并网过渡时的并网控制、微网并网后的恒功率输出和微网全运行状态进行仿真实验,其微网仿真模型按图1构建,主要仿真参数如表1所示。
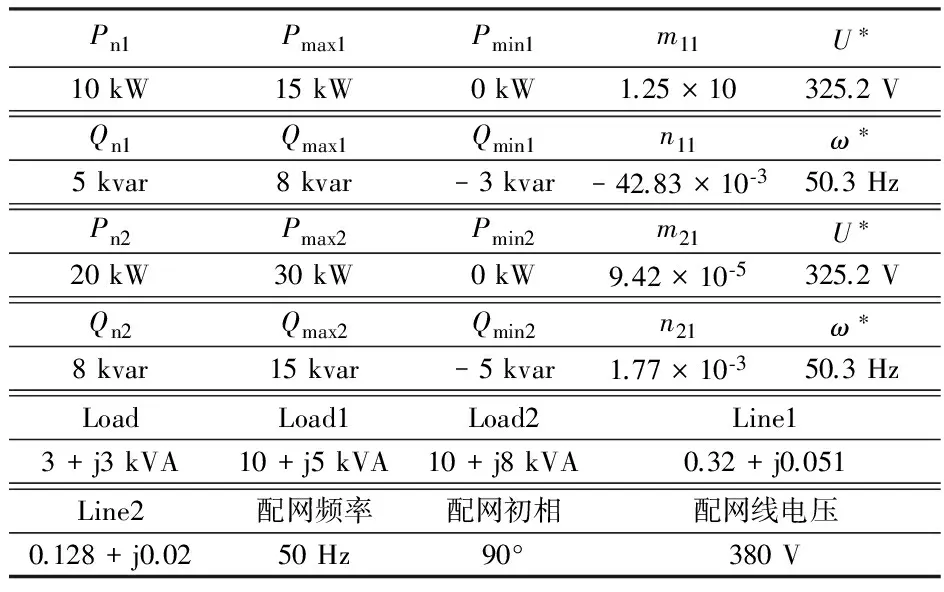
表1 微网仿真主要参数
3.1 孤岛无功环流抑制仿真
微网仿真参数如表1所示。微网孤岛运行时,在0.4 s投入无功环流抑制环节,其仿真结果如图5所示。
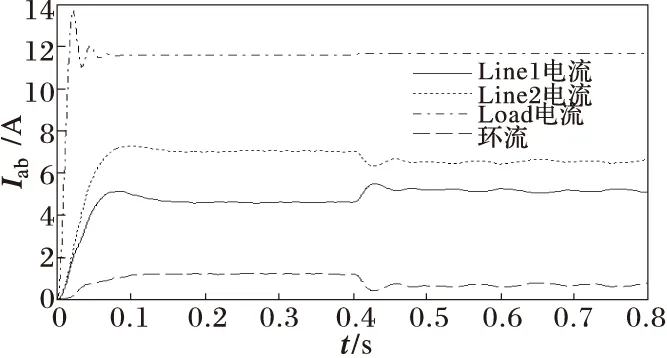
图5 孤岛无功环流抑制效果
从图5可知,在0.4 s以前(属于传统下垂控制器),其环流为1.2 A,而在0.4 s以后(属于改进后的下垂控制器),其环流下降为0.4 A。无功环流抑制环节的投入有效地抑制了环流,从而有利于逆变器的安全运行。
3.2 并网过渡控制仿真
微网先处于孤岛运行状态。在0.5 s时,MGCCS发出微网和配网预同步指令。以微网和配网(CB断路器两端)的A相相电压为代表的预同步过程如图6所示。
从图6可以看出,在0.5 s时MGCCS发出预同步指令,微网和配网的相位相差90°,经过约0.7 s(1.2 s处)后,两者的电压相位和幅度差异都满足并网要求,MGCCS发出CB合闸指令,微网进入并网运行状态。
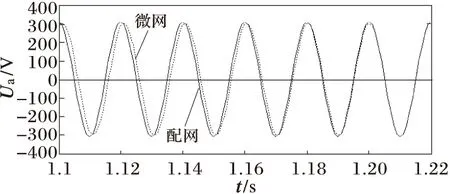
图6 微网和配网的A相相电压预同步过程
3.3 并网后恒功率输出仿真
在1.2 s以后,微网处于并网运行状态。当t∈[12 s 3.8 s]时,控制器属于传统下垂控制器,在2.2 s配网受到干扰导致电压升高3.8 V,3.0 s干扰消除。当3.8 s后投入下垂系数调节单元,在t∈[3.8 s 6 s]属于改进后的下垂控制器,其间4.0 s时,配电网受干扰电压升高3.8 V,4.5 s后干扰消除,5 s时,负载Load增大到13 kW、11 kvar。其仿真结果如图7所示。
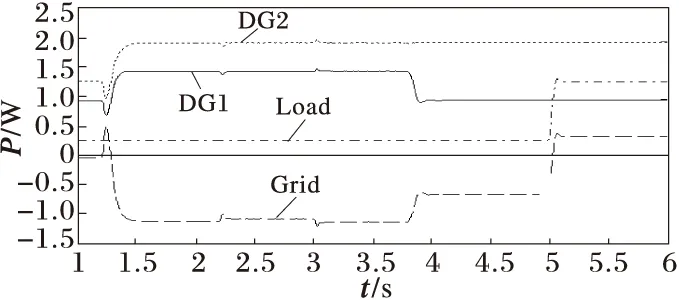
(a) 有功功率变化情况
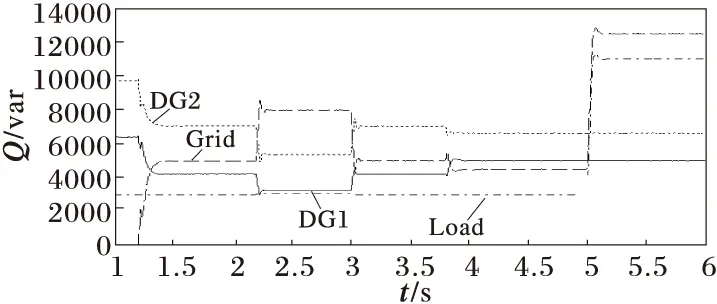
(b) 无功功率变化情况
从图7可知,在t∈[1.2 s 3.8 s]时,有功功率虽没有受到配网电压波动的影响,但DG1没有处于额定功率输出。在t∈[3.8 s 6 s]时,DG1和DG2都处于额定输出状态。从图(b)可以明显地看出:在t∈[1.2 s 3.8 s]时,DG输出的无功功率受到配电网电压的影响波动较大,而在t∈[3.8 s 6 s]时,DG输出的无功功率不受配电网电压和Load负载变化的影响,始终保持额定恒功率输出。仿真结果证明了动态调节下垂系数实现微网并网后,各分布式电源恒功率输出策略的正确性和有效性。
3.4 微网全运行状态仿真
假设微网初始处于孤岛运行状态,其微网全运行状态仿真过程如下:
t=0.4 s:MGCCS发出指令投入环流抑制单元;
t=0.8 s:MGCCS发出并网指令。此时并网预同步控制器开始投入,计算并网点CB两端的电压差值与相位差值,送 入inv1和inv2;
t=1.73 s:预同步控制器检测到电压幅值差和相位差同时小于设定值,MGCCS发出CB合闸指令。为了更清楚显示改进下垂控制器的效果,将下垂系数调节单元延时0.5 s投入;
t=3.0 s:Load由3 kW、3 kvar增到13 kW、11 kvar;
t=4.0 s:load变回到原来的值,即:3 kW、3 kvar;
t=4.5 s:因配电网受到干扰,频率从50 Hz增大到50.2 Hz;
t=5.0 s:干扰消除,配电网频率恢复到50 Hz;
t=5.5 s:MGCCS检测到配电网发生故障,发出CB断开指令;
t=6.0 s:Load又增加到13 kW、11 kvar;
t=7.0 s:环流抑制环节投入运行;
t=8.0 s:仿真结束。
在仿真结果图8中,DG1、DG2、Grid、Load曲线分别为分布式电源1、分布式电源2、配电网输出和微网母线负载Load吸收的相应的功率,Line1和Line2曲线为流过线路1和2的功率。
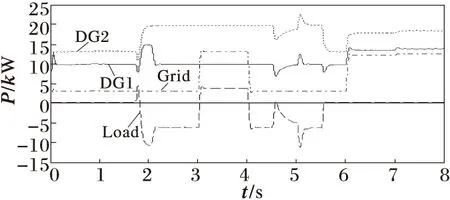
(a) 各单元输出的有功功率

(b) 各单元输出的无功功率
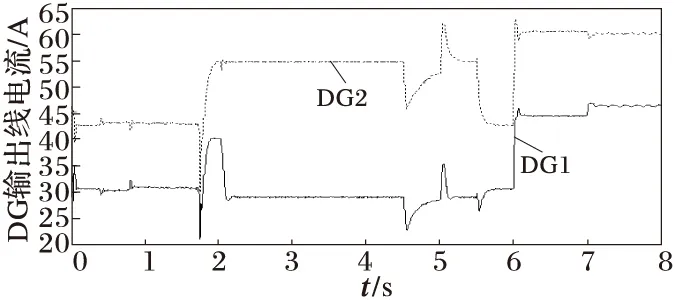
(c) 分布式电源DG输出的线电流

(d) 母线上的线电压
上面的算例仿真了微网的多个运行状态。从图8(c)中可知:并网运行瞬间产生的冲击电流比较小。从图8(a)、(b)可知:在2 s到4.5 s并网运行时,DG1和DG2能够实现额定功率输出。在时间区间[2.1 s 3 s]和[4 s 5.5 s]内,配电网在吸收有功功率,发出无功功率。在[3 s 4 s]内,由于负载Load增大,增加的功率由配电网提供,DG1和DG2的输出功率保持不变。在4.5 s至5 s期间,受到配电网频率波动的影响,经过过渡时间能够实现恒功率输出。从图8(d)中可清楚地看到:整个仿真运行过程中,电压幅值的变化都在[367 V 385 V]内,满足电能质量要求。
4 结语
针对连网线路阻抗不同而产生的环流,设计了无功环流抑制单元,并简述了传统下垂控制方法的基本原理。当分布式电源处于并网运行模式时,受到配电网电压和频率波动的影响,传统下垂控制器无法实现恒功率输出,通过动态调节下垂系数的方法实现了分布式电源的恒功率输出。预同步控制器的应用减少了并网同步过渡运行时间,并且保证了运行模式切换的平滑过渡。利用Matlab/Simulink仿真软件的算例仿真结果说明了控制策略的正确性和可行性。
[1] 姚玮,陈敏,牟善科,等(Yao Wei, Chen Min, Mou Shanke,etal). 基于改进下垂法的微电网逆变器并联控制技术(Paralleling control technique of microgrid inverters based on improved droop method)[J]. 电力系统自动化(Automation of Electric Power Systems),2009,33(6):77-80,94.
[2] 黄汉奇,毛承雄,王丹,等(Huang Hanqi, Mao Chengxiong, Wang Dan,etal).可再生能源分布式发电系统建模综述(Modeling summarizing of distributed renewable energy power generation system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2010,22(5):1-18,24.
[3] 赵宏伟,吴涛涛(Zhao Hongwei,Wu Taotao). 基于分布式电源的微网技术(Review of distributed generation based microgrid technology)[J]. 电力系统及其自动化学报(Proceedings of the CSU-EPSA),2008,20(1):121-128.
[4] Liao Hua, Wu Chun-sheng. A voltage stability droop control strategy of wireless parallel inverters [C]// International Conference on Electrical and Control Engineering, Wuhan, China: 2010.
[5] 王赞,肖岚,姚志垒,等 (Wang Zan, Xiao Lan, Yao Zhilei,etal).并网独立双模式控制高性能逆变器设计与实现(Design and implementation of a high performance utility-interactive inverter)[J]. 中国电机工程学报(Proceedings of the CSEE),2007,27(1):54-59.
[6] 王成山,肖朝霞,王守相(Wang Chengshan, Xiao Zhaoxia, Wang Shouxiang). 微网中分布式电源逆变器的多环反馈控制策略(Multiple feedback loop control scheme for inverters of the micro source in microgrids)[J].电工技术学报(Transactions of China Electrotechnical Society),2009,24(2):100-107.
[7] Lassetter R,Akhil A,Marnay C,etal.Integration of distributed energy resources:the CERTS microgrid concept [EB/OL].http://certs.L-zbl.gov/certs-der-pubs.html,2002.
[8] Laaksonen H, Saari P, Komulainen R. Voltage and frequency control of inverter based weak LV network microgrid [C]// International Conference on Future Power Systems, Amsterdam, Netherlands: 2005.
[9] Mohamed Yasser Abdel-Rady Ibrahim, EI-Saadany Ehab F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids [J]. IEEE Trans on Power Electronics, 2008,23(6):2806-2816.
[10]周玉柱,峁美琴,苏建徽(Zhou Yuzhu, Mao Meiqin, Su Jianhui). 基于功率下垂特性的逆变器无线并联控制技术(Research on wireless parallel operation of inverter with DSP control basing on droop characteristic)[J].电力电子技术(Power Electronics),2007,41(4):9-11.
[11]陈衍. 电力系统稳态分析[M].3版.北京:中国电力出版社,2007.
[12]IEEE 1547.1-2005 Standard conformance test procedures for equipment interconnecting distributed resources with electric power systems[S].
[13]丁明,杨向真,苏建徽 (Ding Ming, Yang Xiangzhen, Su Jianhui). 基于虚拟同步发电机思想的微电网逆变电源控制策略(Control strategies of inverters based on virtual synchronous generator in a microgrid)[J]. 电力系统自动化(Automation of Electric Power Systems),2009,33(8):89-93.
徐瑞林(1965-),男,硕士,高级工程师,主要从事电力系统运行与控制工作。Email:xr1_cq@163.com
徐 鑫(1981-),男,博士,主要从事电力系统通信相关工作。Email:xuxin_cq@163.com
郑永伟(1985-),男,硕士研究生,通信作者,研究方向为分布式发电技术、微电网运行与控制。Email:aoyun200888pm8@126.com
陈民铀(1954-),男,博士,教授,博士生导师,研究方向为智能控制、计算智能及其在电力系统中的应用。Email:minyouchen@cqu.edu.cn
ImprovedDroopControlSchemeforMicro-gridOperation
XU Rui-lin1, XU Xin1, ZHENG Yong-wei2, CHEN Min-you2, Li Chuang2
(1.Chongqing Power Corporation Electric Power Research Institute,Chongqing 401123, China;2.State Key Laboratory of Power Transmission Equipment amp; System Security and New Technology (Chongqing University), Chongqing 400044, China)
The conventional droop controller is difficult to achieve the constant power output on the micro-grid grid-connected operation mode when the frequency or voltage magnitude of the grid fluctuate, the improved droop control scheme which can dynamically adjust the drooping coefficient is proposed for realizing the constant power output on grid-connected mode. At the same time, a suppressor is designed to suppress the reactive circulation current on island operation mode caused by the different connection impedance. Moreover, a pre-synchronizing controller is designed for insuring micro-grid smooth transition between the island operation mode and grid-connected operation mode. Lastly, the proposed control scheme have been validated in accuracy and feasibility by Matlab/Simulink simulation.
micro-grid; island mode; grid-connected mode; smooth transition; droop control
TM727
A
1003-8930(2012)06-0014-06
2011-11-09;
2011-12-21
国家自然科学基金项目(51177177);重庆市科技攻关项目(CSTC2011AC3076)
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
新世纪智能(语文备考)(2020年9期)2020-12-31
数学物理学报(2018年2期)2018-05-14
新高考(英语进阶)(2018年1期)2018-04-18
创新作文(小学版)(2017年33期)2017-04-04
儿童故事画报·智力大王(2016年6期)2016-09-14
通信电源技术(2016年6期)2016-04-20
电测与仪表(2015年16期)2015-04-12
中国卫生(2014年7期)2014-11-10
电测与仪表(2014年12期)2014-04-04
