海洋多缆地震勘探系统的同步采集方法研究*
2012-11-07 05:46杨敬红吴秋云朱耀强阮福明
海洋开发与管理 2012年9期
杨敬红,吴秋云,朱耀强,曾 翔,阮福明
(中海油服股份有限公司物探研究院 天津 300451)
海洋多缆地震勘探系统的同步采集方法研究*
杨敬红,吴秋云,朱耀强,曾 翔,阮福明
(中海油服股份有限公司物探研究院 天津 300451)
文章介绍了一种用于海洋地震勘探系统的同步采集方法。该方法采用高精度时钟分发、实时FPGA硬件延迟补偿算法结合高效的系统控制协议,对多缆不同通道前端采集系统间的延迟差异进行自动补偿,从而实现了系统级的同步采集。该方法实现简单,并且具有实时性强、可靠性高以及同步性能好等优点。通过海上试验表明,本同步采集方法能够满足4缆6 000m范围内、8 000通道规模的系统级同步采集。本方法在远距离分布式系统以及传感器网络等应用中也有着重要的参考价值。
地震勘探;多缆多通道;同步采集;远距离
地震勘探是近代发展变化最快的地球物理勘探方法之一,它的基本原理是利用人工激发的地震波在弹性不同的地层内传播规律来勘探地下的地质情况。具体操作时,采用专门的仪器记录反射波或折射波信号,然后通过专用的软件对数据进行特定的分析处理,就能较准确地测定这些界面的深度和形态,从而为判断地层的岩性提供最直接的参考。因此,地震勘探方法称为勘探含油气构造甚至直接找油的主要方法[1]。
随着地震勘探仪器的发展,能够适应海量数据记录(万道)的高速磁盘记录逐渐成为主流,常规三维观测向宽方向高密度三维观测发展,与之配套的高精度成像、叠前反演和多信息融合的解释技术也得到极大的发展,多波地震、时移地震、井中地震和微地震监测等技术也得到快速发展[2-3]。这就使得地震勘探仪器逐渐发展成为大型、分布式的系统架构。如,斯伦贝谢公司的Q-Marine海上设备可以达到20条拖缆,总通道数可达8万道,每条缆长度达到12km[4]。要实现这样的大型高精度海上地震勘探系统,需要解决很多关键技术问题,包括高精度数据采集、海量数据传输和存储、多通道高精度同步采集等,而其中高精度的同步采集技术显得尤为重要,这将直接影响着采集数据的后期处理和分析结果的准确性和可靠性。另一方面,由于海洋拖缆地震数据采集设备的特殊结构,需要数据采集、传输、同步结构等能够尽量简单,这样便于成本的降低和野外施工的便捷[5]。
大型分布式系统中常用的IEEE-1588同步方法[6],可以实现亚纳秒的同步精度。然而该技术是基于以太网实现的,结构和协议过于复杂,并不适合海洋拖缆系统。此外,还包括GPS全球定位技术[7]、同步以太网技术(SyncE)[8]、计算机网络时间协议NTP技术[9]等,但都由于其复杂性而不能在海洋拖缆系统中得到应用。
本研究提出一种用于大型海洋多通道地震勘探系统的同步采集方法。该方法基于高速串行数据通信的技术进行高精度时钟分发、海量地震数据的传输和系统控制命令的下发,通过精心设计的同步采集控制算法和系统同步协议实现了单缆1 920通道和3缆960通道规模的系统级同步能力。实际的海上试验结果表明,本研究所提方法完全能够满足高精度海上地震勘探数据采集的要求。
1 分布式海洋地震勘探系统结构
海上地震勘探系统由一至多条水下电缆组成,每条电缆由甲板电缆、光纤前导段、工作段、数字包以及尾靶等部分串联而成。其中,工作段是水下系统的核心组成部分之一,在其中等间距地放置大量的水听器(单个或组合形式),从而形成一个有着巨大覆盖面积的传感器阵列。
图1是分布式工作段的典型结构。在该种分布式拖缆工作段中,采集板被等间距地放置在缆中,每块负责4通道水听器信号的数字化处理,数字化后的信号通过本地RS485协议传输到数字包上。水下系统所有数字包都通过高速串行通道进行级联,从而保证水下所有采集板的数据能够通过数字包逐级上传到船载记录系统中[10-11]。因此,数字包起着3个方面的作用,即工作段间的物理连接、本地8块采集板的电源分配和数据收集、数据逐级上传和命令逐级下发。
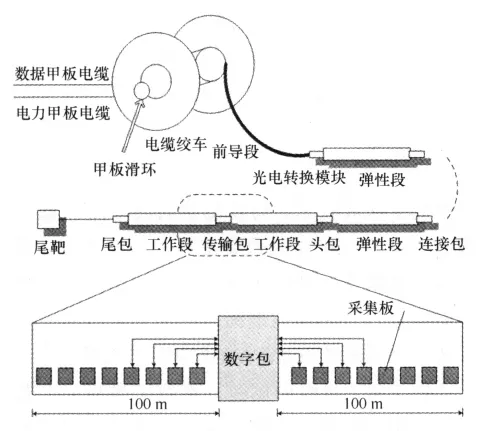
图1 分布式拖缆工作段结构
分布式的工作段拖缆结构,使得水听器模拟信号的传输距离大大降低,从而十分有利于信号的高质量传输。同时由于传输的信号全是数字化后的数据,模拟信号经限于工作段内的局部传输,因此整条水下拖缆的总通道数规模就完全由数字信号的传输能力和电源系统的供电能力所决定了,从而大大提高了单缆的带道能力。这种分布是一种二级流水线数据传输结构,它在该数据传输带来便利的同时,也给系统同步带来了麻烦。
2 大范围系统级同步时钟分发
为了适应大范围地震勘探数据采集的要求,并具备三维甚至是时移地震勘探的能力,多缆规模的系统是必然的趋势。然而,如果这种系统中的每个模块都采用独立的本地时钟进行工作,则会出现很多问题。首先,各个模块时钟的频率不可能完全一致,这会造成各模块采样间隔和工作步调的不一致性;其次,各模块独立时钟变化(包括自身的稳定性、环境的影响等)的不一致性,同样会造成系统不同步,本系统采集时序图如图2所示。为满足要求我们设计了一种适用于大范围系统级的同步时钟分发方案如图3所示。
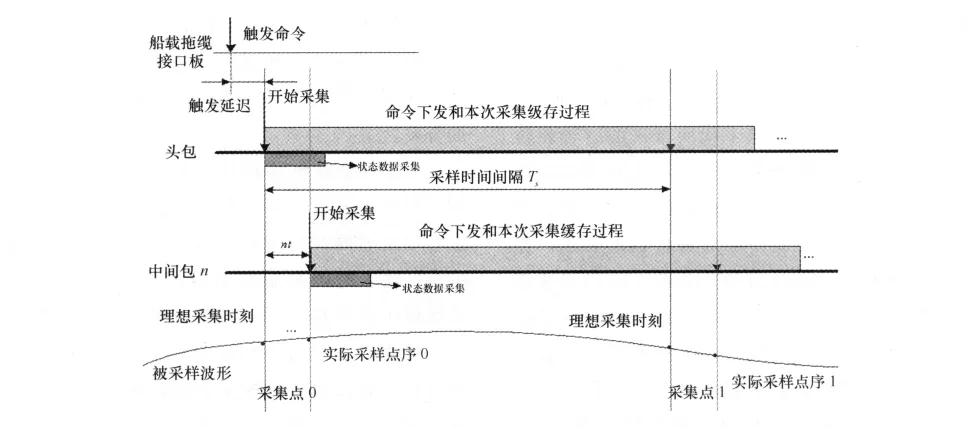
图2 系统采集时序
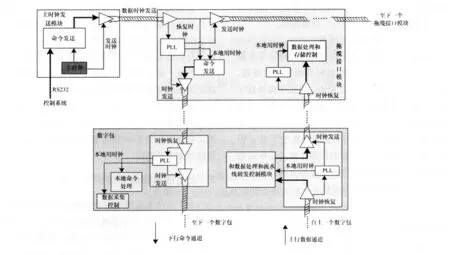
图3 大范围时钟同步分发结构
为了保证系统时钟的同源性,本时钟分发结构采用主时钟分发模块中的时钟作为系统的主时钟源。结合时钟数据融合技术,借助于8B/10B编码,将该主时钟与从控制系统来的命令数据一起通过高速串行通道进行传输。该信号首先发送到各个拖缆接口板的后插板(船载系统基于Compact PCI平台[12]实现),各后插板彼此级联形成一个菊花链。后插板模块在接到该高速串行信号的时候,首先通过CDR(时钟数据恢复)技术从数据中提取出系统发送时钟,并将有效的发送数据分离出来[11]。恢复出来的时钟直接送到PLL锁相环中进行去抖和提纯处理,从而有效滤除由于传输干扰所带来的时钟相位噪音,降低性能的损失,保证发送时钟的高质量。同时,锁相环的加入还可以提高时钟的驱动能力,满足长距离多级时钟传输的要求。经过提纯处理的高质量时钟分为两个方向继续进行分发处理:一个是横向发送到另一块拖缆接口板;另一个是纵向发送大本级拖缆上所有的数字包上(图3)。而采用的技术和实现方法则与主时钟源模块发送时钟和数据时完全一致,大大简化了实现难度的同时,也能够将控制系统下发的命令同步分发到所有前端接收数字包上。数字包接收到该信号的时候,采用于前面一样的方法和技术,将恢复的时钟用于下级分发和本级命令和数据采集使用。如此往复,就可以将高精度时钟同步分发到同一拖缆上的各个数字包以及不同拖缆间的数字包,进而可以实现整个系统级和大范围的时钟同步分发。
由于每条拖缆的尾包(拖缆上最后一个数字包,距离船最远)都不存在后继命令接收模块和前级数据发送模块,因而,此时尾包上的数据发送通道的参考时钟采用命令通道的恢复时钟。如此处理,就可以将系统源时钟通过命令通道发送下去,再通过数据通道上传回来,从而实现真正意义上的系统级高精度同步时钟的分发。
由于每个时钟接收模块都存在着两个方向相反的传输通道,即命令和数据通道,这就造成各模块上同时出现两个恢复时钟。需要强调的是,由于时钟是编码进数据中一起传输的,虽然所传输的数据千差万别,可是时钟只有一个。然而,在经过一段距离的传输并返回后,命令通道和数据通道恢复的时钟在相位上会出现一定的差异(尾包由于命令和数据模块共用同一个时钟,固不存在该差异)。因此,为了保证系统工作时序的稳定性,两恢复时钟不能混用,正如图3所表示的那样。
此外,需要指出的是,图3所提方法仅对高速串行通道的时钟数据恢复和锁相环技术有要求,并不限定是采用光纤传输还是电传输方式。因此,头包(靠近船的第一个数字包)直接采用光传输方式即可实现长距离的数据传输,同时不影响高精度时钟的分发。
3 系统同步采集控制
高精度时钟的分发只能使得每个数字包工作在同一个频率下,并能始终保持变化的一致性。但要实现系统级的同步工作,还需要进行系统同步采集控制的处理。
由于拖缆工作段的长度会带来信号传输延迟,从而导致各数字包接收和执行系统命令在时间上出现差异,这会严重影响采集板采集时刻的同步,因此首先要解决的问题是传输延迟的不一致性,基本思路是将所有数字包执行命令的时刻调为一致。这有两种方法:一是采用时钟树技术[13],即将所有通道传输路径的延迟调为一致,这就使得所有通道接收命令的时刻完全一样,但这种方法对通道一致性要求过高,很难在拖缆中将通道的传输延迟调为一致;另一种方法就是将各通道命令执行的时刻通过延迟补偿的方法调为一致,该方法适合于没有办法精确调节通道本身延迟的情况。还有其他非在线补偿的方法,而只是将延迟的不一致性记录下来,然后在离线数据分析的时候再进行补偿。然而该方法在数据存储的时候需要额外的空间,同时也增加了数据分析时的复杂性。
本系统采用在线延迟补偿技术实现系统命令的同步执行,即每个数字包在接收到系统下传命令时,并不立即执行,而是各自先延迟一段时间,最后再在同一个时刻同步执行。由于命令传输到每个数字包的时刻不一样,因此延迟值的大小显然因包而异。图4显示了延迟值的测量原理。船载控制系统下发系统同步延迟补偿(synchronization delay compensation,SDC)命令至拖缆接口板,由于前面采用的数据时钟融合传输的技术,可以很容易满足该SDC命令同步到达拖缆接口板,因为拖缆间命令通道级联在一个Compact PCI机箱内,长度小于1m,因而同步误差在5ns以内。SDC命令通过拖缆接口板下发到各个数字包的时候,顺着拖缆传输线依次到达水下数字包。数字包i在接收到SDC的时候,触发本地时间测量模块工作的同时,将SDC传递给下一级。当传递到尾包的时候,尾包立即将该命令通过数据通道回环至前一级数字包。这样当数字包i从数据通道中检测到SDC命令时,停止时间测量模块工作,从而可以得到SDC命令发送到回环接收的时间间隔,该值的一半即为数字包i到尾包的延迟时间大小,包括各级数字包处理开销。因此,通过该命令回环延迟测量过程,每个数字包都可以得到与之所对应的延迟值大小。当实际同步执行某个命令时,只要将该命令往后延迟这个时间值后再执行,即可将所有数字包命令执行时刻调整到尾包的时刻,从而达到命令同步的目的。
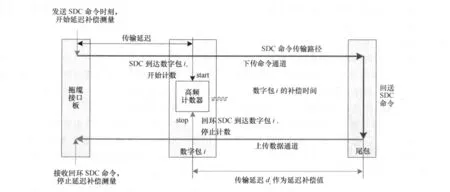
图4 延迟补偿同步原理
为简单起见,数字包内的时间测量模块采用高频计数器来实现,其工作频率通过FPGA内部的锁相环倍频至200MHz,即延迟补偿精度为5ns,表明本系统可以补偿拖缆1m左右的长度误差。拖缆工作时,由于各级工作段都会对前级工作段施加张力,从而会造成拖缆系统发生轴向形变,造成传输延迟会随着工作段数量、拖拽时速和海洋阻力等多方面的影响,显然本延迟测量原理可以较好地解决该问题。图5显示的是该测量原理在FPGA中实现的逻辑结构图。
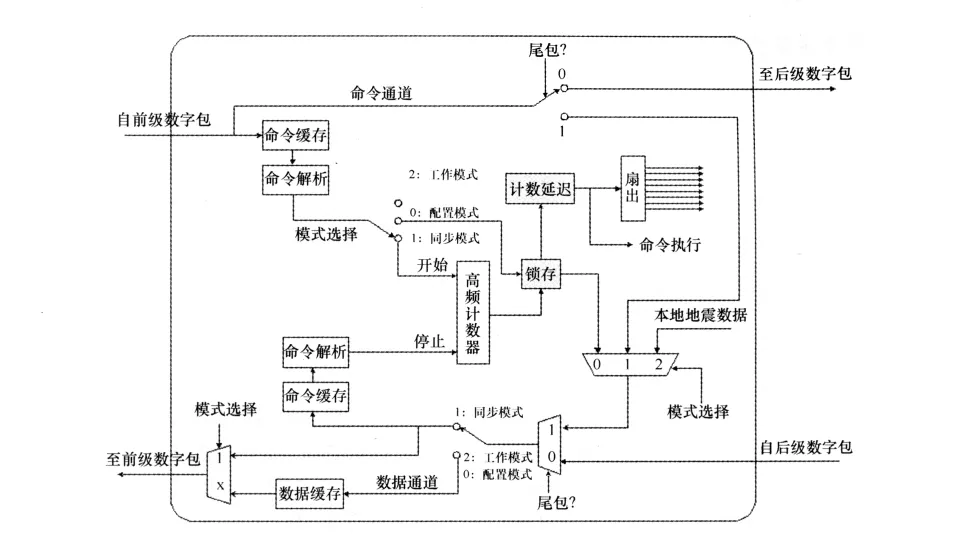
图5 数字包延迟补偿控制逻辑
数字包在上电复位后自动进入配置状态,等待来自控制系统的配置命令。当拖缆接口模块接收到同步延迟补偿命令的时候,会将该命令分发到每个与之相连的数字包。当数字包识别出该SDC命令时,将工作模式调整为同步模式,此时数字包一方面下传SDC命令至后级数字包;另一方面将上传数据通道的数据作为命令进行解析,并从中检测SDC命令。为了能够获得传输延迟的大小,在数字包中采用一个高频计数器在作为时间测量模块,并锁存其测量的结果。计数器的开始由下传命令通道中的SDC命令触发,而停止则由上传数据通道(同步模式下仅用来传递命令参数,而不是地震数据)中的SDC命令触发。锁存器的值既可以由高频计数器写入,也可以通过接收控制系统的配置参数进行写入。因此,为了避免水下系统在工作之前都进行复杂而耗时的同步延迟补偿参数的测量过程,当同步模式下测量出延迟补偿大小的时候,可以在配置模式下将该参数通过数据通道上传到船载控制系统,从而可以记录下来作为系统的工作参数。这样当系统重新上电工作的时候,就可以直接在配置模式下获得补偿参数。
数字包逐级向后传递SDC命令直到尾包上。尾包不会将下传的SDC命令向后级传递,而是将该命令直接通过数据通道向前级返回,从而完成SDC命令在整个水下拖缆数字包间的回环传递,达到测量传输延迟的目的。当数字包切换到工作模式时,系统传递的所有命令都会经过一个计数延迟模块,延迟补偿参数则为上述过程获取锁存值的一半。
延迟技术会导致所有采集数据往后延迟一定的时间大小,从而会造成采集数据的丢失。因此需要对地震采集数据进行流水线缓存,当接收到TB触发信号的时候,将该信号前一段时间内的采集数据一起上传,即可获得对应于真正TB触发发生时刻之后的所有采集数据。假设拖缆总长度为6 000m,则命令延迟时刻为30μs,而本系统常规采样时间间隔为1ms,远大于该延迟值。另一方面,由于采用高速串行数据发送技术,数字包转发命令的处理开销为纳秒量级。因此,不需要考虑命令整体的延迟执行会造成采样数据的丢失。然而,如果系统采样率较高,如0.25ms及以上,再加上各级数字包处理开销的延迟影响,那就必须要考虑命令整体延迟执行对采样数据的影响了。
至此,虽然已经解决了同步时钟分发和命令的同步执行,但还没有完全解决同步采集的问题,因为由于分布式拖缆数据采集结构的原因,此时的命令还没有传递到前端采集板,仅仅到达了数字包。为解决此问题,我们在数字包中将接收到命令通过RS485协议同步扇出至采集板(共8块,见图5),由于数字包工作时钟以及命令执行时刻已经同步完成,显然扇出命令可以同步地到达采集板并完成同步执行。因此,各采集板采用不同源的本地工作时钟,但在系统开始采集命令的控制下,并且在每一次TB命令产生的时刻,都会重新同步采集一次,从而可以消除各采集板工作误差的累积效应,并最终完成整个大范围系统级的同步采集。
4 测试
为了测试和验证本同步采集方法,我们进行了大量的各单元模块测试、实验室系统联合测试以及野外试验。在实验室内测试,我们采用24MHz的时钟作为高速数据通道的工作时钟,并直接用来分发该24MHz时钟至所有数字包。由于所采用SerDes芯片在8B/10B编码状态下工作的相位不稳定性[14-15],最终时钟分发同步精度为一个工作时钟周期,即约42ns,完全满足海洋石油勘探数据采集系统的要求。
由于数字包通过RS485协议向各采集板扇系统命令,考虑到RS485协议工作的特点,我们将该命令工作时钟设置为2MHz,而该时钟则由各采集板所获同步时钟产生。另一方面,我们设置专用的命令时钟同步命令来控制各数字包所产生RS485工作时钟的起始相位,从而可以保证系统下发命令可以同步地传递到各个采集板上。由于采集板采用各自独立的本地时钟,为进一步提高命令接收时刻的一致性,我们采用本地24MHz高频时钟来采集RS485发送过来的数据,而不是先生成2MHz时钟然后再来采集命令数据,从而可以将命令收集同步精度由0.5μs提高到42ns,并最终将整个系统的同步采集能力控制在100ns以内。
为了进一步验证整个海上地震勘探系统同步采集的实际效果,以及整个系统的其他各方面的指标和可靠性稳定性等,我们于2012年2月在北部湾涠洲的工作区内进行了实际的海上试验。图6显示的是6 000m单缆1 920道的采集地震剖面,图7显示的是3缆960道的采集地震剖面。可以看到,二维单缆的初至波从第1到第1 920道所用时间大约为4s,3条缆第一道的初至波在100ms时刻到达,而当时水温较低,声波在海水中的传播速度大约为1 500m/s,证明我们的系统同步性能符合设计目标,并能够满足海洋地震勘探的要求。
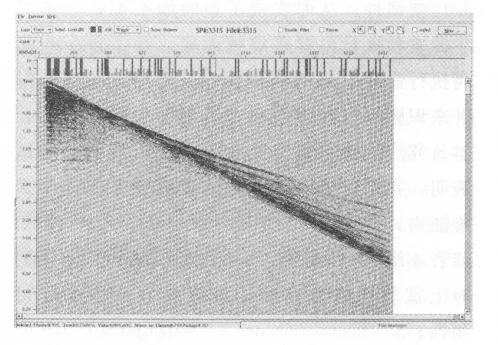
图6 二维1 920道海上试验地震剖面
5 结论

图7 三维3x960道海上试验地震剖面
本研究提出一种适合于大型海上地震勘探数据采集系统的同步采集方法,并详细介绍了其实现细节。为了达到大范围系统级同步能力,首先采用高速串行数据通道将时钟和数据进行融合传输,利用高性能时钟提取和去抖提纯技术,将系统工作系统时钟高精度同步分发到各数字包;其次,设计延迟补偿方法和实现逻辑,保证系统发送命令能够在各个数字包中被同步地执行;最后为了保证前端采集模块同步进行数据的采集,并消除采集时钟误差的长期累积效应,数字包将采集控制同步扇出至采集板,并采用同步复位命令来控制RS485工作时钟的相位精确性,从而实现了系统级控制命令的同步传输和执行。对采集板而言,为了进一步提高执行命令时刻的同步性能,采用本地高频时钟来识别提取数字包扇出的命令。最终,结合本研究所提出的同步采集方法,以及实验测试表明,我们可以实现亚微妙量级的系统同步采集能力,系统规模为单缆6 000m、1 920通道,或者4缆7 680通道。我们对两者进行了实际的海上试验,结果验证了本研究方法的实际可用性。
本研究方法全部采用硬件FPGA逻辑来实现,具有实时性强、可靠性高以及同步性能好等优点。本方法在远距离分布式系统以及传感器网络等应用中也有着重要的参考价值。
[1] 荣钧,王尚旭,詹世凡,等.石油地球物理勘探技术进展[M].北京:石油工业出版社,2006:33-50.
[2] 张玮,詹仕凡,张少华,等.石油地球物理勘探技术进展与发展方向[J].中国工程科学,2010,12(5):97-101.
[3] SPITZER R,VEEN V d,NITSCHE M,et al.Designing 3-D high-resolution seismic surveys[C]∥1998SEG Annual Meeting,Expanded Abstracts.New Orleans,1998:43-46.
[4] WesternGeco,Q Marine Technology[EB/OL].(2010-06-17)[2012-06-19].http://www.slb.com/services/westerngeco/services/marine/marineqtechnology/qmarine.aspx.
[5] IAGC.Marine Seismic Operations:An Overview[EB/OL].(2002-03-1)[2012-06-19].http://www.iagc.org/files/306/Marine%20Seismic%20Operations%20Overview.pdf.
[6] IEEE Std 1588TM-2008.IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems[S].2008:c1-269.
[7] KAPLAN E D.GPS原理与应用[M].邱致和,王万义,译.北京:电子工业出版社,2007:20-23.
[8] 吴先涛,吴承治.同步以太网及其时钟[J].现代传输,2007(6):70-74.
[9] NTP FAQ.The NTP Project[EB/OL].(2011-08-27)[2012-06-19].http://www.ntp.org/index.html.
[10]曾翔,宋克柱,唐世悦.基于光纤的多级数据采集传输系统设计[J].光纤与电缆及其应用技术,2005(6):29-31.
[11]王东旅,杨俊峰,呈宏才,等.地震数据采集系统中的数据传输系统设计[J].数据采集与处理,2011,26(4):494-498.
[12]PICMG.CompactPCI specification revision 3.0[EB/OL].(1999-12-24)[2012-06-19].http://www.picmg.com.
[13]江立强,陈朝阳,沈绪榜,等.一种有效的多时钟网络时钟树综合方案[J].计算机与数字工程,2005,23(11):91-93.
[14]刘序宗,刘树彬,郑伟,等.BESIII TOF子触发系统击中信息多通道串行同步传输方法[J].吉林大学学报:工学版,2008,38(2):483-488.
[15]Texas Instruments,SN65LV1224B10:1LVDS Deserializer[EB/OL].(2009-10-01)[2012-06-19].http://www.ti.com/product/sn65lv1224b.
国家高技术研究发展计划(“863”计划)资助项目(2006AA09A102-02).
猜你喜欢
娃娃乐园·综合智能(2022年3期)2022-04-19
数学小灵通·3-4年级(2021年9期)2021-10-12
世界海运(2021年9期)2021-10-08
小学生学习指导(低年级)(2020年10期)2020-11-09
兵工学报(2019年7期)2019-08-28
船海工程(2018年5期)2018-11-01
军营文化天地(2018年2期)2018-04-20
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
中国老区建设(2016年9期)2016-02-28