
地基大口径望远镜系统结构技术综述
2012-10-30 08:48张景旭
中国光学 2012年4期
张景旭
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
1 引 言
望远镜是天文观测的重要工具,其分辨能力决定着人们可观测到的宇宙空间的大小。望远镜从诞生至今已经经历了400 余年的发展历史,其口径由当初的几厘米到目前的几十米,用途也由纯天文观测发展成对地球外层空间人造目标的普查编目、监视定轨及成像识别。自20 世纪70 年代以来,计算机、光学、自动控制、力学和精密机械等领域诸多新技术的出现,使望远镜镜面口径的局限不再成为无法跨越的难题,并由此降低了望远镜造价,简化了结构。尤其是主动光学技术的应用,使望远镜的设计思想得到了飞跃,口径大、分辨率高、诸位多新技术的应用成为新一代望远镜的突出特点。
本文从地基大口径望远镜发展情况出发,通过介绍5 种典型大口径望远系统,详细论述地基大口径望远镜系统结构的关键技术。
2 望远镜口径发展趋势
目前世界上望远镜口径在2 m 以上的约有100 架,其中口径在3 ~6 m 的约有20 架。从20 世纪90 年代开始,国际上6 m 以上口径的光学红外望远镜就有13 架投入使用,特别是20 世纪90 年代后期,建成了大批拥有先进技术的8 ~10 m 级红外和光学望远镜。如美国、英国、加拿大合作建成的双子望远镜( GEMINI) ,欧洲南方天文台的甚大望远镜( VLT) ,日本的昂星团望远镜( SUBARU) ,主镜都是薄镜面,采用主动光学技术,口径约为8 m,镜面面形精度极高; 美国的凯克Ⅰ、凯克Ⅱ( Keck Ⅰ、Keck Ⅱ) 望远镜口径均为10 m,设计者运用了拼接技术,主镜由36 块六角镜面拼接组成,每块子镜口径为1.8 m,而厚度仅为10 cm,通过运用主动光学支撑,使镜面达到了极高的精度。国外用于低轨空间目标成像的望远镜主要是美国星火靶场口径为3.5 m 的望远镜( SORT) 和毛伊岛的3.67 m 自适应光学望远镜( AEOS) 。这两架大型望远镜用于军事,代表着同类望远镜的最高技术水平。
主动光学和自适应光学技术的成熟,为研制更大口径的地基光电望远镜提供了技术基础。人们普遍认为望远镜口径超过3 m 时,主镜支撑必须采用主动光学技术,这样才能克服自身重力和温度造成的变形。目前,单主镜最大镜面为8.2 m的VLT 望远镜,采用薄镜面主动光学支撑技术,对于更大口径主镜只能采用拼接技术。国际上正在研究和筹建中的巨型地基天文光学望远镜主要有加拿大的20 m 望远镜( VOLT) 、美国天文光学中心的30 m 望远镜( TMT) 、加州理工大学的30m 望远镜( CELT) 、欧洲南方天文台的42 m望远镜( E-ELT) 、日本国家天文台的30 m 望远镜( JELT,次镜和第三镜的直径达到了4 m) 及100 m望远镜( OWL) ,它们的主镜制造都将采用拼接技术。
图1 为望远镜口径发展趋势图[1-2]。
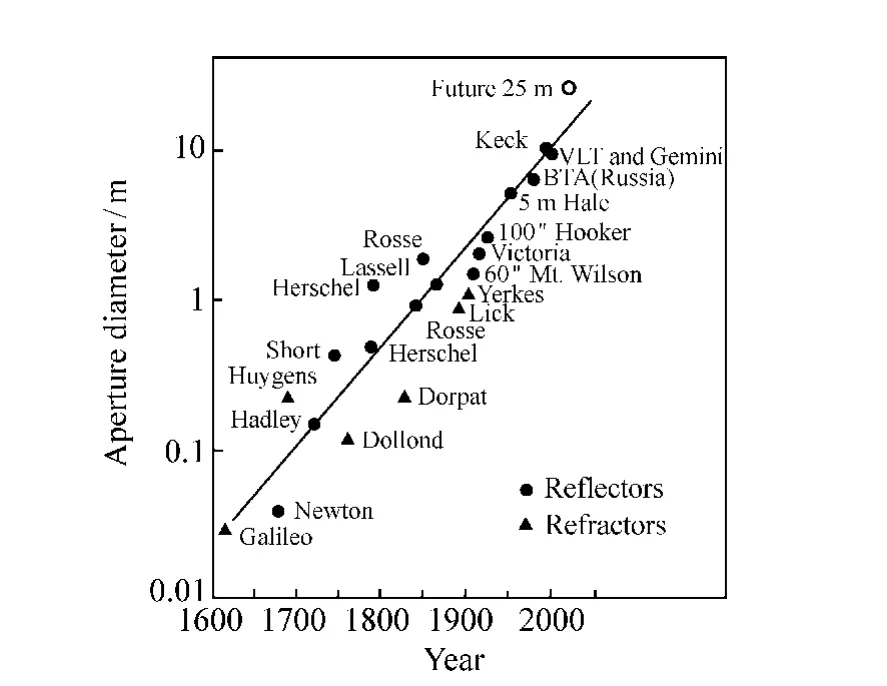
图1 望远镜口径发展趋势Fig.1 Development trend of telescope diameter
自1958 年起,我国也启动了大口径望远镜的研制工作。1989 年,2.16 m 望远镜在北京天文台兴隆观测站安装调试成功,并于当年12 月参加了14 个国家参与的国际联合观测,取得了巨大的成功。2.16 m 望远镜主镜材料采用前苏联进口的微晶玻璃整镜。同期完成的还有安装在佘山观测基地的上海天文台1.56 m 天体观测望远镜,以上两套设备都采用极轴式跟踪架结构。1997 年,大天区面积多目标光纤光谱望远镜( LAMOST,4 m,拼接式) 获得国家立项,系统采用主动光学技术,使其同时具有大视场和大口径的功能,球面反射镜和主镜都运用拼接技术。LAMOST 项目的主要关键技术之一是在世界上首次实现了在一块大镜面上同时应用薄镜面主动光学技术和拼接镜面主动光学技术,并在一个望远镜光学系统中同时采用两块大的拼接镜面。经过多年的技术攻关,2009 年6 月4 日,LAMOST 终于研制成功并通过国家验收。LAMOST 的研制规模和技术难度与目前国际上最大的8 ~10 m 级光学望远镜相当,关键技术处于国际领先水平,为我国研制极大口径望远镜打下了坚实基础[3-6]。
3 地基大口径望远镜的用途
作为天文学家,使用望远镜的目的就是为了观测,以了解浩瀚宇宙的起源及演化规律,关注国家的位置及可能受到的威胁。利用地基光电望远镜,可以看得更远更清楚。因此,望远镜的集光能力及空间分辨力永远是天文学家所追求的指标。集光能力体现在能发现更远更暗弱的目标; 空间分辨力体现在看清细节上。
望远镜光学系统衍射极限分辨力由式( 1) 来计算:

式中:α 为系统衍射极限分辨力,λ 为波长,D为入瞳直径。
从式(1) 可以看出,望远镜的角分辨力和光学口径成比例关系。即在波长一定的情况下,口径越大系统的分辨力越高。当然,口径越大,收集光能量的能力就越强。那么是否只要将望远镜口径做大就可以满足系统分辨力的要求呢? 不然,还受大气湍流的影响。根据式( 1) 计算的当大气相干长度ro=10 cm 时,几种口径系统的衍射极限分辨力及中等湍流强度影响的情况,结果见表1。可以看出,大气湍流的影响使望远镜只能发挥出100 ~200 mm 口径的角分辨能力,相当于1″~2″的水平。要使大口径望远镜发挥出较高的角分辨能力,必须使用自适应光学技术来克服大气湍流的影响,因此配置了自适应光学技术的大口径望远镜系统焕发出勃勃生机。另外,利用多台望远镜基线干涉技术也能进一步提高系统的角分辨能力,如欧州南方天文台的VLTI 系统[7]。

表1 不同口径望远镜在不同轨道高度下的分辨力(ro =10 cm)Tab.1 Diffraction limit of telescopes with different diameters
未来开发全球太空资源的热潮持续高涨,太空作战的趋势愈加明显,地球外层空间将变成各国新的军事斗争领地。空间目标监视系统将在这种新的斗争形式中发挥基础和关键作用,而大型地基光电望远镜将成为空间目标监视系统的主力设备,其作用不可估量。这也是继天文应用和靶场应用以来,又出现的一个新的应用增长点。
空间目标监视系统必须具备以下功能: 精确探测和跟踪重要空间目标,确定可能对执行任务的航天系统构成威胁的其他航天器的形状、尺寸、任务和轨道参数等一系列重要的目标特性; 归类和分发目标特性数据。空间目标主要指卫星,包括不工作的卫星在内,以及各种空间碎片,如进入空间轨道的保护罩、助推火箭和其它物体。另外,如小行星和彗星等许多进入地球外层空间的飞行物也包括在空间目标范围内。据有关资料统计,从1957 年10 月到1988 年7 月底,约1.8 万个空间目标被美国空间跟踪网跟踪到,其中1987 年有7 000 多个,工作卫星只占5%,其余均为空间垃圾,如失效的末级火箭、火箭解体后的碎片、卫星及仪器舱盖。空间目标监视不仅可以预测空间物体的轨道,还有助于确定潜在敌人的空间能力,对己方空间系统遭受的攻击和有可能发生的碰撞进行告警等,具有重要的军事应用价值[8-10]。
大型地基光电成像望远镜具有以下应用意义:
(1) 满足重大航天活动需要 地基望远镜作为主要的测控手段,是跟踪观测航天器并测定其形状、大小、坐标和运动状态的主要测控设备,如将来用于飞船的空间交会对接,飞船在轨状态和返回监视等重大航天活动。
(2) 空间环境监视需要 随着各国航天事业的发展,卫星轨道受到各种空间碎片的污染,对空间碎片的有效探测和监管是避开其危害,保护航天器或卫星的一种有效手段,大口径望远镜具有强大的探测能力,是空间碎片监测的一种有效工具。
(3) 先进光束控制技术试验平台 地基大口径高分辨率成像望远镜的主动光学、自适应光学可以极大提高激光光束控制能力,为激光武器、空间激光通讯、空间目标精确导航和定位等技术试验和演示验证提供强大的试验平台。
(4) 满足天文观测需要 现代天文与空间科学迫切需要研究宇宙深空间的恒星形成与演变,星系分布与结构及演变物理过程对人类的影响与危害,不断发现新天体和探索宇宙中是否有生命体及人类在宇宙中能否生存,探测威胁地球的近地小行星及研究能否利用宇宙为人类的生产和生活服务等。
4 几个典型大口径望远镜系统
4.1 AEOS 3.67 m 及SORT 3.5 m 系统
大型空间目标跟踪望远镜AEOS 采用了自适应光学技术,是美国空军目前最大的空间光学跟踪装置见图2( a) 。该望远镜系统的主镜是一个薄弯月形的整镜,直径为3.67 m,次镜可按照用途进行更换,望远镜视场为1 mrad,库德视场为0.3 mrad,自适应光学补偿成像,面型精度为21 nm,有56 个促动器,400 km 轨道卫星分辨力为10 cm。安装望远镜的圆顶直径为27.4 m,工作时,圆顶整体下降并打开。这样可使望远镜整体外露,以保持圆顶内温度与周围一致并消除震动,提高了空间目标成像质量。哥伦比亚号航天飞机失事前4 天,科学家使用3.67 m 望远镜长波红外摄像机成功地拍摄并且记录了航天飞机的在轨图片,图像清晰度极高,成为后期事故原因分析的第一手资料[11-13]。

图2 AEOS 和SORT 望远镜Fig.2 AEOS and SORT telescopes
SORT 3.5 m 望远镜是美国空军实验室定向能理事会为星火光学靶场研制的大口径光学演示验证系统,用于可见光大气补偿研究、近红外波段激光发射研究及低轨人造卫星成像研究,见图2( b) 。该望远镜主镜是φ 3.5 m 的硼硅酸盐材料完整镜体,轻量化设计,采用56 点主动侧底支撑,主动制冷控制,面形精度为18 nm,视场为1 mrad,采用941 圆变形镜的自适应系统,波前测量速率为1 500 Hz。1997 年9 月首次开展自适应光学试验,在对800 km轨道高度的人造卫星成像时采用自适应光学技术,分辨力可达30 cm。望远镜后端配有库德实验室,包含有快速反射镜、变形镜、波前控制和目标跟踪传感器、高分辨率相机、激光信标及能量注入系统。可开展镜体控制、镜体清洁、环境热控、光学准直、卫星跟踪、跟踪架控制、低轨卫星跟踪及激光反卫和高次波前补偿等实验[14-15]。
4.2 VLT 8.2 m 系统
欧洲南方天文台于1986 年开始研制4 台望远镜,耗资超过了5 亿美元,见图3。1998 年建成第一架望远镜Antu,于1999 年4 月正式投入使用,主要仪器为光学和红外波段摄谱仪和照相机。1999 年3 月建成第二架望远镜Kueyen,于2000年4 月正式投入使用,主要仪器为两架大型摄谱仪。2000 年1 月建成第三架望远镜Melipal,2000年7 月建成第四架望远镜Yepun,主镜表面的研磨精度达到8.5 nm。2005 年和2006 年,欧洲南方天文台的科学家们在甚大望远镜旁建造了3 台口径为1.8 m 的辅助望远镜,4 台8.2 m 望远镜与这3 台望远镜组成了甚大望远镜干涉仪( VLTI) 见图3。干涉仪的聚光面积不会因为这些辅助望远镜的加入而显著增大,但是基线数目和成像质量将会得到提高。
每个主镜都是整镜,口径均为8.2 m,采用R-C式光学系统,重量为22 t,焦比为F2,厚度为18 cm,下方的主动光学系统安装了150 个促动器。采用地平式跟踪架,叉臂重量<120 t,镜筒重量为100 t,470 t 重的机架漂浮在0.05 mm 厚的油膜上,可以灵活转动。4 台望远镜可以独立工作,也可以作为一个等效口径为16 m的光学望远镜进行联合观测。这4 台8 m 望远镜均为RC光学系统,排列在一条直线上,指向精度达到1″,跟踪精度达到0.05″,主镜支撑均采用主动光学系统。这4 台望远镜可以组成一个干涉阵,也可每一台单独使用,或进行两两干涉观测。
VLT 望远镜位于智利安托法加斯塔以南130 km的帕瑞纳天文台,海拔2 632 m,气候干燥,一年当中的晴夜数量超过340 个[16-19]。
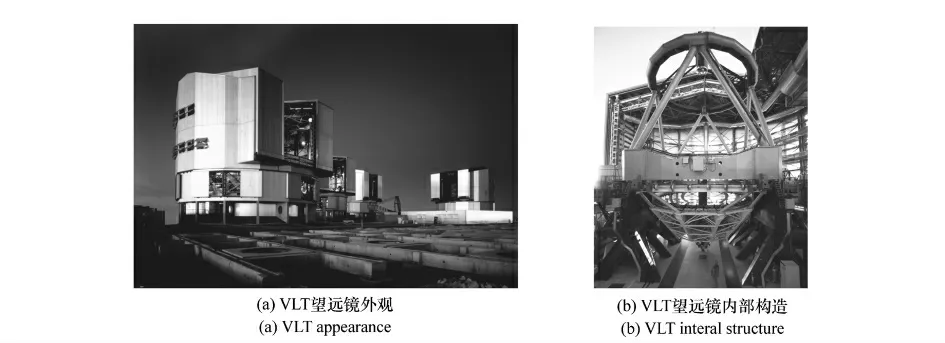
图3 8.2 m VLT 望远镜Fig.3 8.2 m VLT telescope
4.3 TMT 30 m 及E-ELT 42 m 系统
由美国加州大学、加州理工学院和加拿大大学天文学研究协会组成的联盟联合建造的30 m口径望远镜( TMT) 2004 年开始规划,见图4。于2011 年动工,2018 年完工。该项目预计耗资12亿美元。
TMT 直径为30 m 的主镜面由492 块直径为1.4 m 的六边形镜片拼合而成。它安装了自适应光学系统,能够随机调整镜面状态。直径为30 m的镜面将使TMT 比现有顶级望远镜敏感100 倍,能提供大9 倍的观察面积。TMT 的观测波段从近紫外到中红外(0.31 ~28 μm) 。凭借TMT 强大的观测能力,天文学家们将能够观测约130 亿光年远,这意味着他们能够对宇宙中诞生的首批恒星所发出的光线进行分析,追踪星系形成和演化的过程,同时还能直接观测围绕其他恒星旋转的行星。这将帮助人类了解宇宙的历史,解开许多未知的天文谜团。而望远镜加配的自适应光学系统将帮助它获得最高的成像质量。据估计,其成像清晰度将达到哈勃空间望远镜的12 倍。
TMT 的设计工作已经完成,建造工作已于2011 年开始,预计2020 年正式投入使用。望远镜将建在夏威夷大岛上的冒纳凯阿火山,这座海拔4 205 m 的死火山堪称天文学宝地,它的山峰钻出云端,一年中有300 天视野清晰。大岛上人口稀少,在这里观测不会受到城市照明设施干扰[20-22]。
欧洲极大望远镜( E-ELT) ( 见图5) ,是欧洲南方天文台即将建造的地面光学天文望远镜,其主镜直径为42 m,重为5.5 t,由906 块直径为1.45 m 的六边形镜面拼成,光路上的次镜直径达到6 m,三镜直径为4.2 m,用于将光线引入自适应光学系统。系统集光面积达到了1 300 m2,建造完成后将成为世界上最大的光学望远镜。
欧洲科学家近日决定在智利海拔3 060 m 的阿塔卡马荒漠高原上建造世界最大的E-ELT 望远镜。由于阿塔卡马荒漠高原具有极端干旱和幽暗的环境,特别适合进行天体观测。望远镜的修建工作已于2011 年开始,预计2018 年完成。

图4 30 m TMT 望远镜Fig.4 30 m TMT Telescope
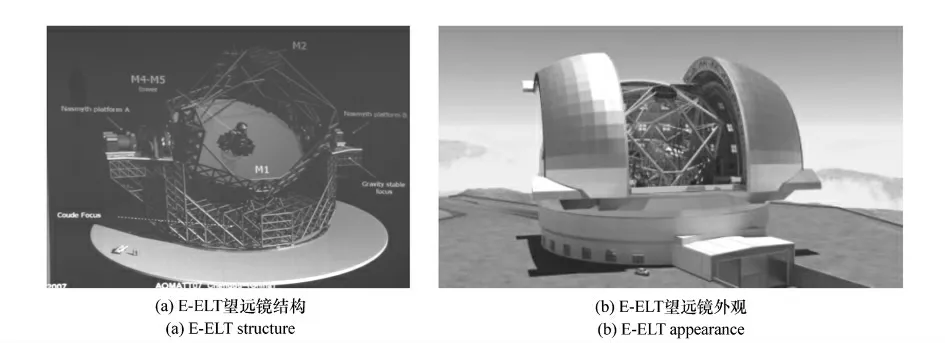
图5 42 m E-ELT 望远镜Fig.5 42 m E-ELT Telescope
系统的设计成本为8 130 万美元,制造成本将高达11 亿美元。E-ELT 望远镜既可以用作普通可视观测,还可以被用作红外观测。该望远镜的图像分辨率将达到哈勃望远镜的10 ~15 倍[23-25]。
5 大口径望远镜系统结构特点及关键技术
5.1 大型跟踪架结构技术
大口径地基光电望远镜结构复杂庞大,跟踪架是其结构主体,其作用在于支撑望远镜光学系统及在瞄准跟踪时实现二维旋转。因此,大型跟踪架结构技术是结构系统最主要的关键技术。大型跟踪架技术具体包括:跟踪架结构形式、大承载能力高精度轴系技术、伺服传动技术及大型结构件技术等。大型跟踪架结构形式一般分为: 极轴式跟踪架、地平式跟踪架及水平式跟踪架。对大型跟踪架的轴承设计要考虑3 个主要因素: 高刚度、高精度及低摩擦。伺服传动技术主要侧重于传动方式与位置检测元件的选择及配合使用问题。可选择的传动方式有:蜗轮副传动、齿轮副传动、摩擦轮传动、直流力矩电机直接驱动。可选择的位置检测元件有:增量式轴角编码器、绝对式轴角编码器、感应同步器、钢带编码器。结构大件的设计主要采用两种结构形式: 薄板箱型焊接结构和桁架结构。
5.2 主望远镜筒结构技术
望远镜镜筒结构涉及主镜、次镜及四通( 或中间模块) 几个结构组件的连接关系,其作用在于保证主次镜的相对位置。一般来说,小型光学望远镜的镜筒采用真正的圆筒形设计,由于载荷较小,支撑位置对结构变形的影响不大,有利于保证精度。对于大口径地基光电望远镜系统,当重力方向和镜筒轴线垂直时( 镜筒打水平状态) ,如采用圆筒形镜筒且在中间位置支撑会造成两侧的主次镜同时发生下沉或偏摆。这种偏斜的作用相互叠加,会引起望远镜的指向误差及成像点的彗差,严重影响望远镜的工作性能,因此,望远镜镜筒的结构设计十分重要。
从望远镜中心模块的4 个顶点各向主镜组件和次镜组件方向伸出4 个A 形桁架单元,与组件连接后即构成标准的Serrurier 桁架镜筒结构。基本原理是,这些桁架在中心模块的交点正好通过水平轴所在的水平面,以避免在中心模块上产生附加的力矩。当重力的方向与镜筒的轴线重合时,主次镜压缩A 字形的桁架并同时下沉,但镜筒的轴线保持不变; 当重力的方向与镜筒的轴线垂直时,由于上下面桁架不支持主次镜的重量,且杆件的长度不变保证了主次镜只产生平移运动,而不产生任何的镜面转动。主次镜的重量及产生的弯矩由左右两侧桁架承担。Serrurier 桁架结构的设计思想是使主次镜产生相同的下沉位移量。
随着望远镜尺寸的增大,主镜组件的重量显著增加,远高于次镜组件重量增加的比例,由此导致镜筒的重心极其靠近主镜。所以,有些设计将主镜组件直接紧固连接到中心模块上,严格说,这不是真正的Serrurier 桁架结构设计思想,但由于计算机技术及CAD 技术的发展,通过严格的仿真设计仍然可以很好地保证精度要求[26]。
5.3 主镜支撑技术
主镜支撑技术是大口径地基光电望远镜系统最关键的结构技术之一。随着望远镜技术的发展,望远镜主镜口径不断增大,镜子自重也显著增大,在望远镜工作时其面型精度受制于其自重及温度引起的变形。如何保持主镜的面形精度,使其免受自重及温度的影响或将这种影响降低到可接受的限度是主镜支撑技术要研究的主题。传统2 m 级口径以下的系统,主镜采用一定径厚比( 一般1∶6 ~1∶10) 的整块圆镜坯,通过中心或边缘定位及底支撑和侧支撑机构来实现主镜支撑。这种支撑的施力方式为被动加力过程且不具有实时性及可控性,因此,被定义为传统的“主镜被动支撑系统”。对于小于30 cm 口径的主镜,镜坯自身刚度很好,可看作刚体,一般采用固定3 点的底、侧支撑方案。对大于30 cm,小于2 m口径的主镜,镜体刚度已不能满足自重抗弯要求,采用简单的3 点支撑是行不通的。底支撑一般采用基于三点定位原理的whiffletree 无定向板机构形成多点支撑(9 点、18 点、27 点、36 点、54 点等) 或由平衡重杠杆系统及气、油垫支撑系统加载的镜体浮动支撑系统。侧向支撑常采用边缘支撑方式及平衡重杠杆机构,侧支撑力的合力通过主镜重心,具有定位和非定位两种应用。常用支撑形式:推拉支撑、水银袋支撑、吊带支撑、V 形支撑及点支撑等。定心中轴承受很小或不承受载荷。
20 世纪70 年代末期,随着4 m 级、6 m 级、8 m 级( 主镜整镜) 及10 m 级( 拼接镜面主镜) 以上的大口径地基望远镜系统的提出及工程实施,发展出了主动光学技术并奠定了其理论基础。这一理论的建立是革命性的,它为大口径地基望远镜的设计制造开辟了广阔的空间,也使人类探索宇宙的能力提升到了新的高度。主动光学概念的提出源于大口径主镜支撑及面形精度保持的瓶颈问题。大口径主镜如按常规的径厚比制造,直接引起结构重量的大幅增加,同时支撑结构刚度变差导致精度保持能力显著降低。更主要的是材料热惯量增大带来的问题,镜体温度很长时间都不能与环境温度保持一致,镜面时刻处于温度变形状态。早期Palomar 5 m 望远镜及前苏联6 m 望远镜利用率不高就是这一问题造成的。主动光学的基本思想是实时检测望远镜的像质或镜面形状,实时做出校正,使望远镜始终保持优秀的成像质量。根据主镜的结构可将主动光学分为薄镜面主动光学和拼接镜面主动光学。基于主动光学的主镜支撑理论定义为“现代望远镜主镜支撑理论”。主动光学的主镜支撑系统采用力型促动器或位移型促动器施力,且由力或位移传感器实时测量形成闭环控制,因此,加力过程具有实时性及可控性。主镜薄镜面的设计加工也具有较大难度,一般多采用薄弯月镜形式。如AEOS主镜的口径为3.67 m,厚度为16 cm( 径厚比为23/1) ,VLT主镜的口径为8.2 m,厚度为18 cm( 径厚比为46.86/1)[27-30]。
5.4 次镜支撑技术
在桁架结构或次镜筒的上端支撑部分为次镜机构组件,通常包括两个部分:中心十字支撑结构和次镜调整机构。中心十字支撑结构一般设计成四翼梁式的圆环结构、基于薄钢带预紧原理的方形结构或薄桁架结构,其优点是结构稳定、中心遮挡小和易于加工装配。经典的四翼梁结构是中心对称且呈十字型分布的薄板形支承结构,可采用偏置梁片设计来增加其抗扭刚度。在四翼梁的设计中,为了支撑次镜组件的重量,每个梁均由上下两个叶片构成垂直于镜筒轴线的A 字形桁架,且让次镜机构组件的重心正好通过四翼梁的中心线,使次镜不产生偏斜。当然,次镜组件要进行配平。有的设计将支撑四翼梁的大圆环改为正方形外圈,与四翼梁的叶片组成稳定的三角形结构,此时叶片可改为薄钢带预紧的形式。对于超大口径的次镜支撑,多采用高强度轻质的碳纤维复合材料,将叶片做成薄片的桁架结构。
次镜调整机构的功能为:校正倾斜、轴向失焦调整、消除主次镜位置偏差引起的3 级彗差及红外调制技术用摆动副镜实现斩波功能( chopping) 。在带有自适应光学的系统中,次镜设计成兼有快速反射镜的功能。所以,次镜调整机构至少要设计成3 自由度系统,有的系统采用5 自由度甚至6 自由度的调整机构。典型的6 自由度机构是6 杆万向平台机构。1965 年,D.Stewart 提出了6 杆万向平台机构的理论,这种机构也被称为Stewart 平台。其最大优点是仅仅通过6 根杆件长度的变化就可以实现对所支承平台各个方向上的所有运动,同时这6 根杆件可以形成3 个三角形的形状,所以这种结构装置具有极高的刚度和稳定性。在大口径地基光电望远镜系统中,次镜调整机构多采用Stewart 平台方案[31]。
6 结束语
目前,6 m 口径以上的系统跟踪架全部采用地平式结构形式,5 m 以下系统跟踪架采用地平式及极轴式结构。在1990 年以后使用的3 ~8 m口径的系统,主镜都采用薄弯月镜面或蜂窝结构轻量化镜面。3 m 级以上的系统总重量在70 ~几百吨;2 m级的系统总重量在20 ~40 t。大口径地基望远镜造价巨大。1980 年以后研制的设备造价和口径关系约为D245,单位为百万美元。辅助设施的费用与设备造价相当[32]。
从目前掌握的资料来看,国外已不将2 m 口径以下的系统看成是大口径望远镜系统。对于国外大型地基光电望远镜,2 ~4 m 级系统已成为成熟技术;5 ~10 m 级系统技术趋向成熟;8 m 以下采用整镜薄镜面;10 m 以上采用子镜拼接技术;在30 ~100 m 级巨型系统方面,美国和欧洲正在展开技术竞争。近年来,光学系统也从同轴系统向离轴系统方面发展,并在工程领域中的应用越来越多。作为军用级的以成像为目的的自适应光学望远镜,美国处于领先地位,并研制出了两套技术完美的实用系统。
[1] BELY P Y.The Design and Construction of Large Optical Telescopes[M]. Berlin:Springer-verlag,2002.
[2] 夏坚白.实用天文学[M].武汉:武汉大学出版社,2007.XIA J B.Practical Astronomy[M]. Wuhan:Wuhan University Publishing House,2007.( in Chinese)
[3] CUI X Q. Progress and prospect of LAMOST project[J].SPIE,2006,6267:626703.
[4] CUI X Q. The optical performance of LAMOST telescope[J].SPIE,2010,7733:773303.
[5] CUI X Q. Preparing the first light of LAMOST[J].SPIE,2008,7012:701203.
[6] 苏定强.2.16 m 天文望远镜工程文集[M].北京:中国科学技术出版社,2001.SU D Q. 2.16m Astronomical Telescope Process Corpus[M]. Beijing:China Science & Technology,2001.( in Chinese)
[7] KOEHLER B,FLEBUS C. VLTI auxiliary telescopes[J].SPIE,2000,4006:13-24.
[8] 李东源.国外的地基对空间目标光电探测系统浅析[J].光电对抗与无源干扰,2003,69(1) :9-11.LI D Y. Overview on photoelectric detection for ground base to space target aboard[J].Photoelectricity Antagonize and Passive Disturb,2003,69(1) :9-11.( in Chinese)
[9] 孔建业.美国空间目标监视系统概况[J].863 先进防御技术通讯( A 类) ,2000,8.KONG J Y. Overview of supervisory system in America for space target[J]. 863Advanced Defensive Technology Communication(Class A) ,2000,8.( in Chinese)
[10] 李颖.空间目标监视系统发展现状及展望[J].国际太空,2004(6) :28-32.LI Y. Present status and prospect of supervisory system for space target[J].International Space,2004(6) :28-32. ( in Chinese)
[11] VIGIL M L,DAVID J. Sensor suite for the Advanced Electro-Optical System( AEOS) 3.6 m telescope[J].SPIE,1996,2819:151-169.
[12] KIMBRELL J E. AEOS 3.67 m telescope primary mirror active control system[J].SPIE,1998,3352:400-411.
[13] HOUCHARD J. Orbital debris detection program highlights from the air force mauii optical station[J].SPIE,1994,2214:7-20.
[14] LIPINSKI R J. Laser beaming demonstrations at the starfire optical range[J].SPIE,1995,2376:219-230.
[15] FUGATE R Q. The starfire optical range 3.5 m adaptive optical telescope[J].SPIE,2003,4837:934-943.
[16] FUGATE R Q. The VLT enclosure design and construction[J].SPIE,1997,2871:650.
[17] 崔向群.采用主动光学的大口径单块薄镜面的支撑系统[D].南京:中科院南京紫金山天文台,1995.CUI X Q. Supporting system of large aperture thin monolithic primary mirror with active optics[D]. Nanjing:Nanjing observatory,Chinese Academy of Sciences,1995.( in Chinese)
[18] WILSON R N.Reflecting Telescope OpticsⅡ[M]. Berlin:Springer-verlag,2001.
[19] ARCIDIACONO C. The opto-mechanical alignment procedure[J].SPIE,2010,7733:773357.
[20] ROBERTS S. Optical performance analysis and optimization of large telescope structural designs[J].SPIE,2005,5867:58670O.
[21] SZETO K,ROBERTS S,SUN S,et al.. TMT telescope structure system:design and development[J].SPIE,2008,7012:70122G.
[22] ROBERTS S. Systems engineering of the TMT through integrated opto-mechanical analysis[J].SPIE,2010,7738:773818.
[23] MARCHIORI G. New solutions for innovative ELT[J].SPIE,2006,6148:614806.
[24] ANDERSON T. An integrated model of the E-ELT[J].SPIE,2008,7017:70170S.
[25] MURGA G. Detail design and construction plans for a dome for the E-ELT[J].SPIE,2010,7733:773324.
[26] 程景全.天文望远镜原理和设计[M].北京:中国科学技术出版社,2002.CHENG J Q.Principle and Design of Astronical Telescope[M]. Beijing:China Science & Technology,2003.( in Chinese)
[27] RAY F B. Active optics technology-an overview[J].SPIE,1991,1532:188-206.
[28] IYE M,NOGUCHI T. Active optics experiments with a 62 cm thin mirror[J].SPIE,1990,1236:929-939.
[29] 苏定强,崔向群.主动光学—新一代大望远镜的关键技术[J].天文学进展,1999(17) :1-13.SU D Q,CUI X Q. Active Optics—Pivotal technology of new Large aperture telescope[J].Development in Astronomy,1999(17) :1-13.( in Chinese)
[30] YODER P R.Opto-Mechanical Systems Design[M]. New York:Marcel Dekker,Inc.,1993.
[31] 程景全,李国平.四翼梁式十字形中心支撑的力学特性[J].天文仪器与技术,1988(1) :5-10.CHENG J Q,LI G P. Mechanical properties of crossed-vane type supporting structure[J].Astronomical Instruments and Technology,1988(1) :5-10.( in Chinese)
[32] VAN BELLE G T. The scaling relationship between telescope cost and aperture size for very large telescopes[J].SPIE,2004,5489:563.
猜你喜欢
数学小灵通·3-4年级(2022年5期)2022-06-01
小哥白尼(军事科学)(2022年2期)2022-05-25
小哥白尼(军事科学)(2022年1期)2022-04-26
快乐语文(2021年34期)2022-01-18
石油化工建设(2020年1期)2020-08-24
VOGUE服饰与美容(2019年10期)2019-12-02
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
摄影之友(影像视觉)(2017年12期)2017-02-08
人大建设(2017年9期)2017-02-03
杂文月刊(2016年11期)2017-01-10
