液压混合动力挖掘机能量再生控制研究
2012-10-26 13:33:50于安才姜继海
哈尔滨工程大学学报 2012年1期
于安才,姜继海
(1.哈尔滨工业大学 机电工程学院,黑龙江 哈尔滨 150080;2.浙江大学 流体传动及控制国家重点实验室,浙江 杭州310027)
近年来,随着世界范围内工业技术的发展,能源短缺和环境污染问题日趋严重.挖掘机耗油高、排放差,其节能和减排问题不容忽视.节能研究有助于降低系统的发热,提高系统设备的可靠性和工作寿命,降低系统的装机功率,从而在一定程度上节约设备的制造和维护成本[1-2].根据储能装置的不同,混合动力分为电动混合动力方式和液压混合动力方式.电动混合动力采用蓄电池、超级电容及燃料电池作为能量存储单元;液压混合动力采用液压蓄能器来存储能量[3-4].近年来,液压混合动力技术在汽车领域受到了广泛地关注,美国EPA、伊顿公司及德国的力士乐公司都对液压混合动力车辆进行了深入的研究.鉴于其在动力性能和燃油经济性方面的优越表现,工程机械领域也逐渐引入液压混合动力技术.目前国内对液压混合动力工程机械的研究较少[5-8].
本文将液压混合动力系统以并联方式配置到挖掘机中,平均发动机的输出转矩,保证发动机工作于最佳燃油工作点或工作区,再生动臂及回转装置的惯性能以提高挖掘机的作业效率.根据挖掘机作业特点,合理选择关键元件的设计参数.针对回收能量的不同,设计液压泵/马达转矩控制方式和转速控制方式,采用智能PID控制方法有效抑制液压系统的参数摄动和系统不确定性,提高整机的控制性能.
1 液压混合动力挖掘机配置方式
挖掘机典型作业工况包括:挖掘、铲斗提升并旋转90度、放铲并返回起始位置.典型作业工况下,发动机的输出转矩变化如图1[9]所示.可见发动机的输出转矩波动大,并且具有周期特点,因此采用并联式的方式可平均发动机的输出转矩,可有效地降低发动机的油耗,降低尾气排放.同样,回转装置及动臂往复运动频繁,可回收能量多.
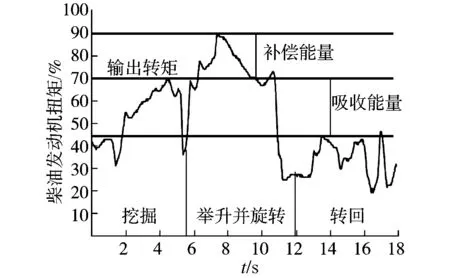
图1 发动机输出转矩Fig.1 The output of engine torque
液压混合动力挖掘机(见图2)由发动机、变量泵、定量马达、液压泵/马达、液压蓄能器、减速器、减压阀等构成.发动机驱动变量泵为其他执行机构提供油源,液压泵/马达通过变量泵以并联方式配置在发动机一侧,通过回转液压泵/马达和减速机来驱动回转装置.液压蓄能器置于液压泵/马达、回转液压泵/马达及液压变量泵之间,吸收发动机多余功率、回转装置的惯性能和动臂处的重物势能.通过减压阀为液压泵/马达的变量机构(变量油缸和电液伺服阀)提供稳定的控制油源.动臂下降时,换向阀2开通,控制器调整液压变量泵排量控制动臂下降速度,同时将重物势能转化为液压能存储于蓄能器中;回转时,并联在发动机一侧的液压泵马达工作于泵工况,为回转装置提供稳定的动力油源,工作于泵工况,在安全制动回转装置的同时,将回转惯性能转换为液压能存储于液压蓄能器中;非通过控制回转驱动液压泵/马达的排量来适应驾驶员对回转速度的要求及负荷的变化;回转制动时,换向阀1关闭,换向阀2开通,驱动液压泵/马达工作于回转工况时,并联在发动机一侧的液压泵/马达根据整机的负荷情况,吸收和补偿发动机的输出功率与负荷功率的差值,达到负荷平均化的目的,保证发动机工作于最佳燃油工作点或工作区.
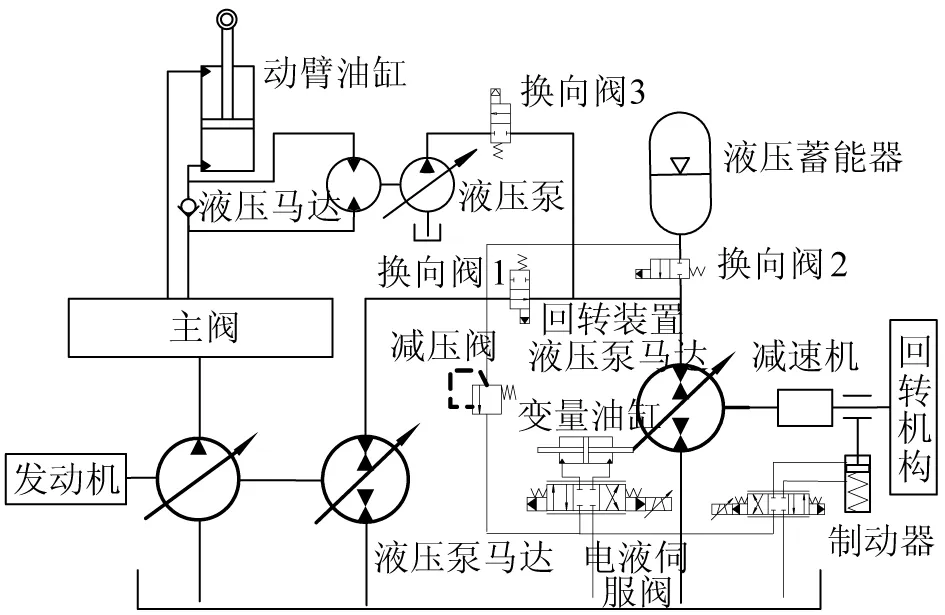
图2 并联式液压混合动力挖掘机原理Fig.2 Schematic diagram of parallel hydraulic hybrid excavator
泵/马达排量按原回转马达的排量选择,液压蓄能器的容积设定应以系统单次循环可回收的最大能量为准:

式中:E为可回收的总能量,p1为液压蓄能器最低工作压力,V1为液压蓄能器内气体在最低压力下的体积,n为气体的多变过程指数,V为蓄能器容积,ωh为制动前回转装置最高转速,Jh为转动惯量.mb为工作装置总质量,Y为重心变化高度,Ef为发动机多余能量.
2 能量回收控制方式
并联式液压混合动力挖掘机的能量回收装置包括:主泵一侧的液压泵/马达、回转装置液压泵/马达和动臂油缸处的液压变量泵.由于能量回收装置回收的能量及连接方式的不同,其能量控制方式也各异.
2.1 驱动液压泵/马达转矩控制
液压泵/马达通过主泵与发动机连接,其转速与发动机转速相同,因此采用转矩控制方式.中央控制器根据手柄的幅度、速度以及加速度计算系统所需转矩,发动机输出转矩恒定,两者的差值为液压泵/马达的目标输出转矩 Tp/m.Tp/m为正值,液压泵/马达提供辅助转矩;Tp/m为负值,液压泵/马达吸收发动机多余转矩.液压泵/马达的转矩由系统压力和斜盘倾角决定.在恒压系统中,由于压力恒定,因此,液压泵/马达的斜盘摆角与转矩是线性关系,所以可以利用斜盘摆角来实现转矩控制.液压泵/马达的高动态响应可以实现转矩的开环控制,但由于受到粘性摩擦转矩、压力波动等因素的影响,其开环控制须修正.在非恒压系统中,压力变化明显,开环控制不能满足转矩控制要求.因此可利用变量油缸处位移传感器的位移信号近似计算斜盘倾角,通过与系统压力传感器处的压力信号相乘,得出液压泵/马达的输出转矩,通过实际转矩值与期望转矩值的偏差来控制变量机构,进而控制泵/马达输出转矩.液压泵/马达转矩控制原理如图3所示.

图3 液压泵/马达转矩控制原理Fig.3 Schematic diagram of hydraulic pump/motor torque control
2.2 回转液压泵/马达转速控制
在驱动和制动过程中,中央控制器根据回转驱动手柄的幅度、速度以及加速度计算转速,对回转液压泵/马达进行转速控制,直接控制回转速度.控制系统通过实际转速信号与期望的转速信号的偏差信号来控制伺服阀、变量油缸动作,改变液压泵/马达排量,直到转速等于期望值.控制器的输出应当近似地与液压转矩和负载转矩的差值成比例.变量控制油缸和伺服阀组成的系统具有典型的积分环节和延迟环节.通过斜盘摆角(控制油缸活塞位移)的反馈所形成的内部闭环控制系统,可以将系统的积分特性转变为比例延迟特性,从而改善转速控制系统的稳定性和动态特性.
针对液压挖掘机回转装置的非线性和不确定性等因素,对液压泵/马达采用智能PID控制方法进行分段变结构控制,从而达到理想的控制效果.
基本思想是通过设置最大误差阈值em1及最小误差阈值 em2将系统偏差 e(k )分为大、中、小3 档[10].
规则1若 e(k) > em1,则 u(k)= ± umax,说明偏差过大,相应的控制量应最大.
规则2若e(k)·△e(k)>0或△e(k)=0,e(k)≠0说明误差朝绝对值增大方向变化或误差为某常值.
当em1> e(k) >em2,说明误差也较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝小方向变化,并迅速减小误差的绝对值.

当e(k )<em2,说明尽管误差朝绝对值增大的方向变化,但误差绝对值本身并不是很大,可考虑控制器实施一般的控制作用,扭转误差的变化趋势,使其朝误差绝对值减小方向变化,则

规则3若e(k)·△e(k)<0说明输出正趋近给定值或者已达到平衡状态,可考虑控制器减少控制量或控制器输出不变.

其中:umax为最大控制量,M、N为可调系数.0<N<1,M > 1;k0、k1、k2为系数,k0=kp+ki+kd,k1=(kp+2kd),k2=kd,kp、ki、kd分别为比例系数、积分系数和微分系数.显然智能PID算法在本质上是非线性的,规则1、4使系统具有快速性和稳定性,规则2、3则使PID调节具有变参数调节的自适应特性.
3 仿真研究
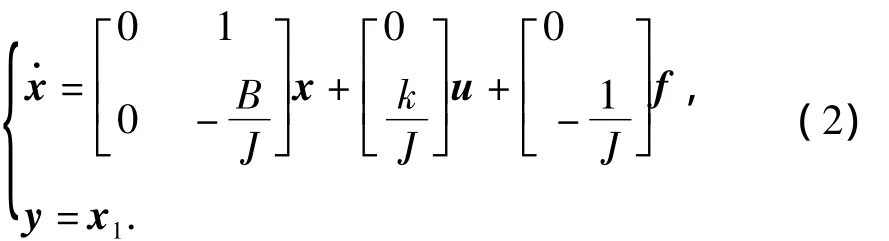
以图2所描述的液压混合动力挖掘机为仿真对象,研究该系统控制方式的有效性.回转系统的状态方程[11]为
为了比较PID和智能PID控制,以图1所描述系统为仿真对象,分别采用PID控制方法和智能PID控制方法对其进行了仿真研究,其仿真结果见图5.从图中可以看出采用智能PID控制显著地提高了系统的响应速度,降低了超调量,缩短了稳定时间,从而改善了系统的控制性能.
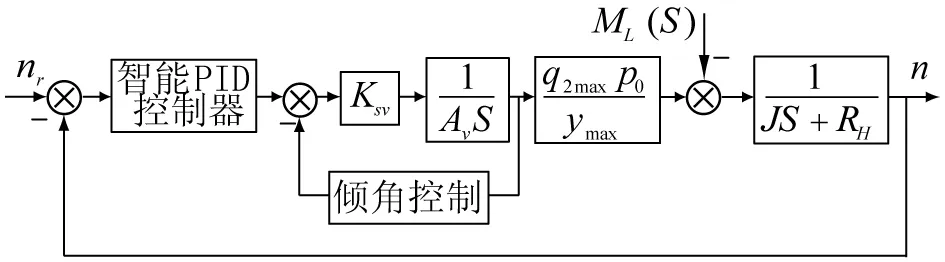
图4 简化后系统传递函数方框图Fig.4 Transfer function diagram of the system

图5 液驱混合动力系统的速度控制性能曲线Fig.5 Speed control curves of the hydraulic hybrid system
4 试验研究
比较2种不同的控制算法对于系统节能效果的影响[12],搭建了液压混合动力挖掘机模拟试验台,根据相似原理,模拟挖掘机回转装置进行制动动能回收转速控制试验研究.图6是驱动液压泵/马达主动吸收发动机多余能量的转矩控制试验曲线,图7是单闭环PID转速控制下空斗回转机构制动试验曲线,图8是采用双闭环智能PID转速控制下空斗回转装置制动试验曲线,满斗工况下,不同控制方法下回转制动的节能效果对比如图9所示.

图6 转矩控制主动充压试验曲线Fig.6 Active filling pressure test curve of torque control
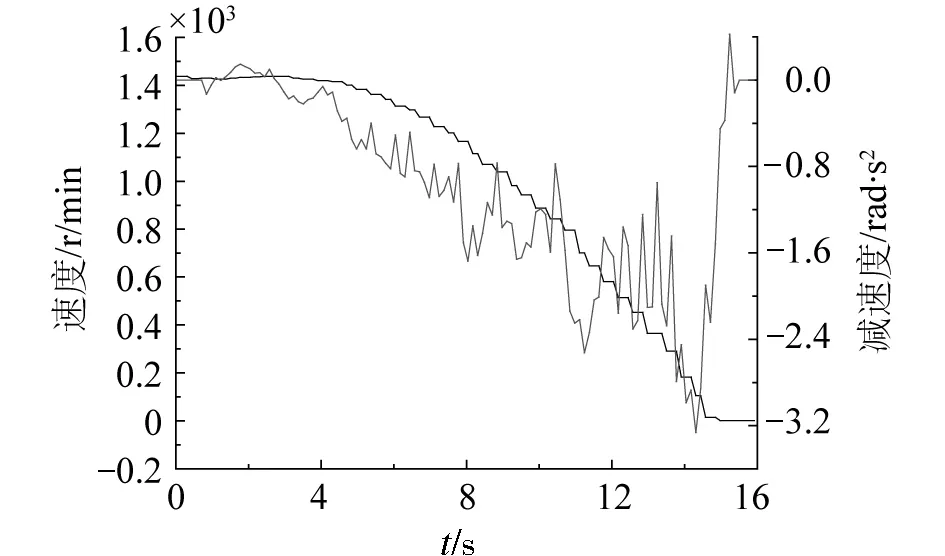
图7 空斗单闭环PID转速控制Fig.7 Signal-loop em pty bucket PID speed control
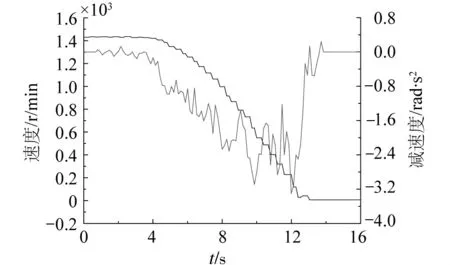
图8 空斗双闭环PID转速控制Fig.8 Dual loop empty bucket PID speed control
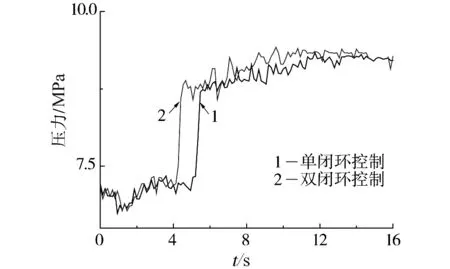
图9 不同控制方法对满斗回转制动性能的影响Fig.9 The effect of different control methods on the full bucket rotary braking performance
液压泵/马达的转矩由系统压力和斜盘倾角决定.压力变化小时,采用开环控制+转矩补偿的方式即可满足控制要求.但由于液压混合动力系统压力幅度大,必须进行闭环控制,采用双闭环PID转矩控制方式,液压泵/马达的响应速度快,控制精度高,可有效地吸收发动机的多余能量,为其他作业工况提供辅助能量.
由模拟试验结果可知:采用单闭环PID转速控制,系统响应稍慢,制动过程持续时间长,制动能回收率低(空斗28.64%,满斗53.27%);采用双闭环智能PID转速控制,系统响应快,制动平稳,制动过程持续时间短,制动能回收率高(空斗41.03%,满斗60.93%).
5 结束语
将液压混合动力技术以并联方式引入挖掘机的系统中,使整车结构紧凑,提高挖掘机的驱动和制动性能.利用液压泵/马达可工作于四象限的特点,主动吸收发动机的多余能量来平均发动机功率,保证发动机工作于最佳燃油工作点或工作区,回收和再利用挖掘机动臂及回转装置的惯性能,从而减少发热量提高挖掘机的作业效率.针对混合动力系统的参数摄动和不确定性,采用智能PID控制理论设计了系统的控制器.仿真及模拟试验结果表明,与发动机并联的驱动液压泵/马达转矩控制可有效平均发动机多余能量,为其他作业工况提供辅助能量,回转液压泵/马达转速控制可高效回收回转装置制动动能.液压混合动力挖掘机具有传统挖掘机的动力性能,系统响应快,在实现能量高效回收的同时,提高了挖掘机的操控性能.
[1]张彦廷,王庆丰,肖清.混合动力液压挖掘机液压马达能量回收的仿真及试验[J].机械工程学报,2007,438:218-223.ZHANG Yanting,WANG Qingfeng,XIAO Qing.Simulation and experimental research on energy regeneration with hydraulic motor for hybrid drive excavator[J].Chinese Journal of Mechanical Engineering,2007,438:218-223.
[2]王庆丰,张彦廷,肖清.混合动力工程机械节能效果评价及液压系统节能的仿真研究[J].机械工程学报,2005,41(12):135-139.WANG Qingfeng,ZHANG Yanting,XIAO Qing.Evaluation for energy saving effect and simulation research on energy saving of hydraulic system in hybrid construction machinery[J].Chinese Journal of Mechanical Engineering,2005,41(12):135-139.
[3]魏英俊.新型液压驱动混合动力运动型多用途车的研究[J].中国机械工程,2006,17(15):1645-1648.WEIYingjun.Study on a new type of hydraulic sport utility vehicle[J].China Mechanical Engineering,2006,17(15):1645-1648.
[4]KEPNERRP.Hydraulic power assist—a demonstration of hydraulic hybrid vehicle regenerative braking in a road vehicle application[C].International Truck and Bus Meeting,Chicago,USA,2002.
[5]YU Ancai,JIANG Jihai.Research on the regenerative braking control strategy for secondary regulation hydrostatic transmission excavators[C]//IEEE International Conference on Mechatronics and Automation.Changchun,China,2009.
[6]夏禾,张楠.车辆与结构动力相互作用[M].北京:科学出版社,2005:337-338.
[7]姜继海,于安才,沈伟.基于CPR网络的全液压混合动力挖掘机[J].液压与气动,2010,9:44-48.JIANG Jihai,YU Ancai,SHENWei.The review of full hydraulic hybrid excavator based on common pressure rail network[J].Hydraulic and Pneumatic,2010,9:44-48.
[8]SUN Hui.Multi-objective optimization for hydraulic hybrid vehicle based on adaptive simulated annealing genetic algorithm[J].Engineering Applications of Artificial Intelligence,2010,23(1):23-27.
[9]HE Qinghua,HAO Peng.Study on load identification and power matchine of excavator[C]//International Conference on Advances in Construction Machinery and Vechicle Engineering,Shanghai,China,2007.
[10]姜继海,韩永刚,王德海.二次调节静液驱动系统的智能PID控制[J].哈尔滨工业大学学报,1998,2:36-38.JIANG Jihai,HAN Yonggang,WANG Dehai.The intelligent PID control in hydrostatic drive system with secondary regulation[J].Journal of Harbin Institute of Technology,1998,2:36-38.
[11]BORGHESANI C,CHAIT Y,YANIV O.Quantitative feedback theory toolbox user manual[M].New York:The Math Works Inc,1994.
[12]TANNURIEA,PESCECP.Comparing two different control algorithms applied to dynamic positioning of a pipeline launching barge[C]//Proceedings of the 10th Mediterranean Conference on Control and Automation.Lisbon,Portugal,2002.
猜你喜欢
现代制造技术与装备(2021年9期)2021-04-03 13:44:40
装备制造技术(2020年4期)2020-12-25 05:26:14
通信电源技术(2018年5期)2018-08-23 01:15:34
小学生导刊(2017年15期)2017-05-17 05:44:09
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
有色金属设计(2015年2期)2015-02-28 21:08:56
中国修船(2014年5期)2014-12-18 09:03:08
筑路机械与施工机械化(2014年10期)2014-03-01 03:02:09
筑路机械与施工机械化(2014年8期)2014-03-01 03:00:56