基于期望模式修正方法的混合网格多模型估计
2012-10-26 13:34:18刘扬国强吴钦章
哈尔滨工程大学学报 2012年2期
刘扬,国强,吴钦章
(1.中国科学院光电技术研究所,四川成都610209;2.中国科学院研究生院,北京100049;3.哈尔滨工程大学 信息与通信工程学院,黑龙江哈尔滨150001)
变结构多模型算法(VSMM)[1]是近年来发展起来的一种有效的机动目标跟踪算法,它克服了交互多模型(IMM)算法的缺陷,费效比IMM算法高,在运算量及其实现的复杂度与跟踪性能之间达到了较好的平衡,因此,近年来受到越来越多的关注.VSMM算法的技术核心是模型集合自适应(MSA)策略.MSA策略用于确定每一个时刻参与状态估计的有效模型集.目前已经提出的MSA策略包括模型集切换(MGS)[2]、可能模型集(LMS)[3]、期望模式修正(EMA)[4]等算法.其中EMA算法发展较为成熟,应用较为广泛.本文以该算法为基础,分析EMA算法存在的局限性,同时引入可能模型集(LMS)技术和自适应网格(AG)技术,实时产生一个混合模型网格,最后利用最优融合原理得到系统的整体估计.
1 EMA算法及其局限性
EMA算法的基本思想是:首先设定一个相对较大且结构固定的模型集M来覆盖整个系统模式空间,同时利用固定模型集M的滤波结果,实时产生一个与系统真实模式更为匹配的修正模型C,并利用修正模型C再次对机动目标进行滤波估计,最后利用最优融合原理得到系统的整体估计,从而达到利用修正模型C对固定模型集M的滤波结果进行修正的目的.
EMA算法中的固定模型集M所包含的模型在一个连续模式(加速度)空间S内均匀分布,每一个模型被看作模式空间中的一个点,具有不同的加速度,而模型间的双向箭头表示从一个模型到另一个模型的跳变,如图1(a)所示.修正模型C可以位于模式空间中的任何位置,该位置由固定模型集M的滤波结果实时决定.通常修正模型C是模型集M滤波结果的概率加权和:

k时刻,EMA算法所利用的模型集如图1(b)所示,目标实际的机动加速度在“*”处.理想状况下,根据固定模型集M在k时刻的滤波结果所产生的修正模型C位于“*”附近,相对于模型集M中的模型,模型C更加接近于系统的真实模式.因此模型C能够对固定模型集M的滤波结果起到修正作用.

图1 EMA算法模型集拓扑结构Fig.1 The topology of the model set in EMA
EMA算法的一个运行周期如下:
1)在时刻 K 基于模型集 Mf=Mk-1- Ek-1运行VSMM 算法一个递归周期 VSMM[Mf,Mk-1]获得模型的状态估计、估计误差协方差以及模型概率{,
2)利用式(1)得到期望扩张模型C.
3)运行递归 VSMM[C,Mk-1]获得状态估计,估计误差协方差以及模型概率
4)运行融合估计 EF[Mf,C;Mk-1]一个周期得到属于模型集Mk=Mf∪C的整体估计,误差协方差以及模型概率
上述EMA算法存在以下几个不足:
1)修正模型C对模型集合M具有很强的依赖性,但是由于模型集合M是一个固定结构的模型集,当机动目标发生机动时,模型集M的估计结果会偏离目标,这就导致在此基础上得到的修正模型C与系统的真实模式之间存在偏差,如图1(c)所示.此时,模型C很难对固定模型集M的滤波结果起到修正作用,从而影响算法的估计精度.
2)由于模型集M具有固定结构,因此,算法滤波结果对集合拓扑结构具有很大的依赖性.同时,由于模型集合M必须完全覆盖整个系统模式空间,导致包含的模型数量较多,模型数量过多容易引起模型间不必要的竞争.
3)修正模型C作为单独的修正模型,其修正能力是有限的.
2 改进的期望模式修正(M-EMA)算法
2.1 算法思想
M-EMA算法利用2个独立模型网格组成当前参与估计的模型集:基础网格M和修正网格C.2个网格分别以各自不同的时间精度和空间精度进行状态估计.k时刻的网格M和网格C仅仅由k-1时刻的网格M和网格C来决定.这就消除了EMA算法中修正模型C对固定模型集M的依赖.同时引入自适应网格(AG)技术,利用该技术操作简单实现快速的特点,在采样间隔较短,模型间距较小的高分辨率环境下,根据目标的实际机动实时产生一个自由滑动的修正模型网格C用来替代EMA算法中单个的修正模型C从而使模型网格C的修正力度加强.然后引入可能模型集(LMS)技术应用于基础网格M的产生,使基础网格M成为能够根据目标机动情况实时变化的模型集,削弱EMA中模型集M对目标机动方式和模型集拓扑结构的影响;并且减少了那些与系统模式相距较远的模型,使得模型的分布更加集中.
2.2 算法实现
根据M-EMA算法思想可知,M-EMA算法的关键是如何根据目标机动的实际情况得到基础网格M和修正网格C.
M-EMA在确定基础模型网格M时,利用LMS方法,将所有模型分为不可能模型集、有效模型集和重要模型集3类.模型集自适应方法为:1)删除不可能模型集;2)保留有效模型集;3)激活与重要模型毗邻的模型集.

式中:Mk-1为k-1时刻所使用的模型集;Mk为k时刻应该使用的模型集;Uk-1分别为 Mk-1中不可能模型和重要模型的集合;Ami为与重要模型毗邻的模型集.由此基础模型网格M便成为一个根据目标机动情况实时产生、模型分布相对集中、模型数量相对较少的变结构模型集,算法详细流程参考文献[3].
修正模型网格C的确定则利用AG技术,网格C中各个模型的参数在一个连续区域内自适应的滑动.因此任何时刻只需要少量与系统模式相关的模型.假设选择5个匀加速模型组成该修正网格,各个模型的加速度参数对应于不同机动水平的网格点,记为 C={CCen,CTop,CDow,CLef,CRig},其中 CCen为网格中心,{CTop,CDow,CLef,CRig}分别是上、下、左、右4个方向上的网格点.修正模型网格C的确定分为2个主要步骤:步骤1用于更新中心模型CCen;步骤2用于实现4个方向上的网格点的更新.文献[5]中详细描述了自适应网格的产生,但文献[5]中的模型网格仅仅在水平方向进行自适应,这里将文献[5]中水平方向的自适应方法扩展到竖直方向,从而产生修正模型网格C.同时在参考文献[6]中的改进方法,引入平滑因子α,提高修正网格C的稳定度.由此,修正网格C摆脱了对模型集M的依赖,同时由于C在时间和空间上分辨率相对较高,因此更利于接近系统的真实模式,实现对基础网格M的有力修正.
在得到上述基础网格M和修正网格C之后,利用最优融合原理得到系统的整体估计.M-EMA算法中参与融合的模型集合拓扑结构如图2所示,“*”处表示系统真实模式,图2(a)、(b)描述了修正网格C在k和k+1时刻在系统模式空间中的位置,正方形区域代表系统的真实模式空间;图2(c)、(d)闭曲线包围的模型集为k和k+1时刻利用LMS技术确定的基础模型网格;图2(e)、(f)描述了 MEMA算法在k和k+1时刻所利用的动态模型集,由此可知,基础网格M与修正网格C在系统真实模式附近形成了双层覆盖,并且参与状态估计的模型集合更加集中,并接近于系统真实模式.
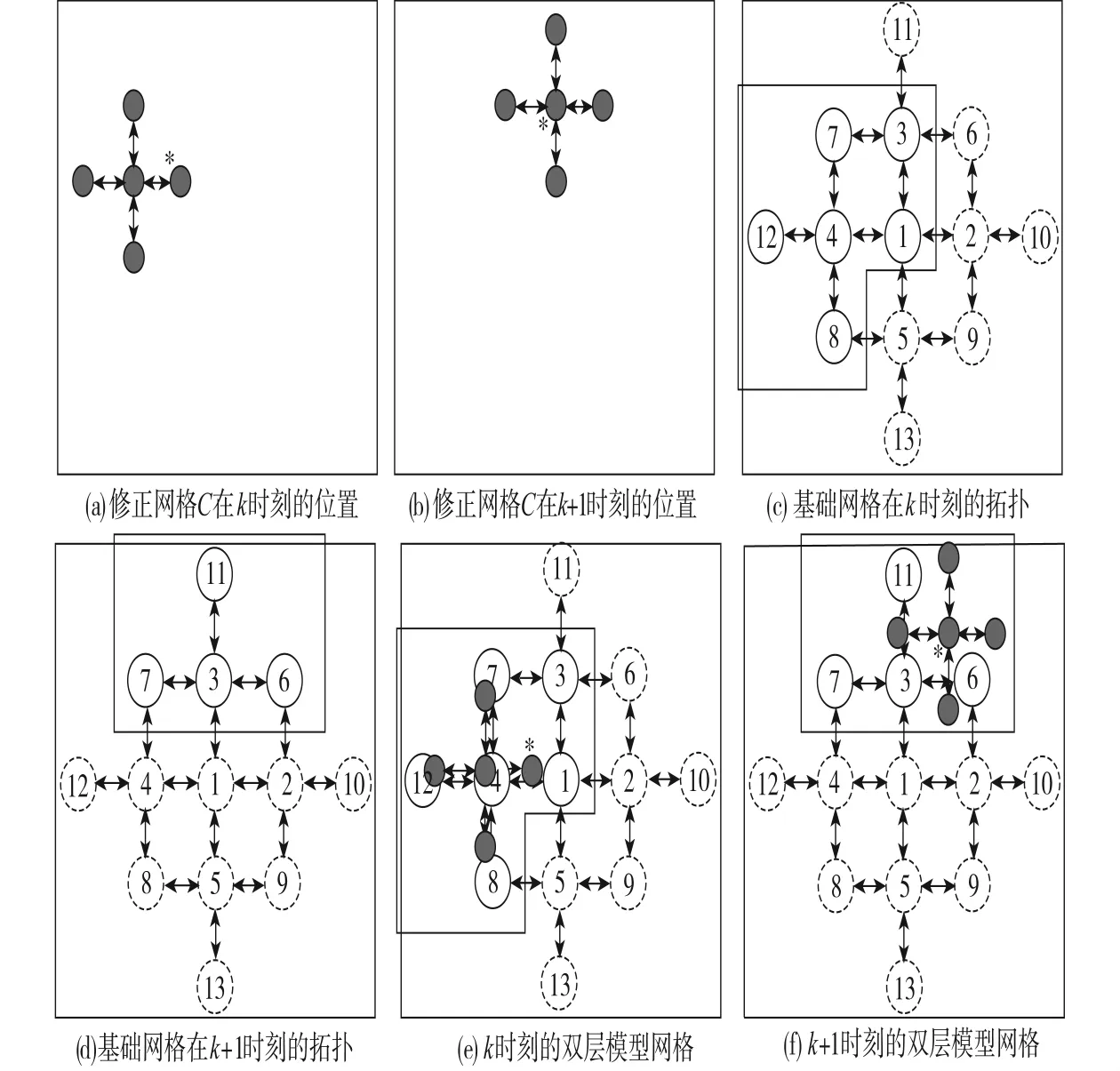
图2 双层网格变结构多模型估计中的模型集拓扑示意Fig.2 The topology of the model set in double layer model grid VSMM
2.3 算法流程
M-EMA算法中系统模式空间Ac定义为[-80,80].基础网格M模型距离约为40.模型m1~m13的分布见图2(c)~(f),模型采样时间TM=1 s.修正网格C可能位于系统模式空间中的任何位置,主要依赖于网格C前一时刻的滤波结果,模型最大间距D为待定参数,这里设D=10,模型采样时间TC=0.5 s.模型集C与M之间的转移概率矩阵如图3所示.
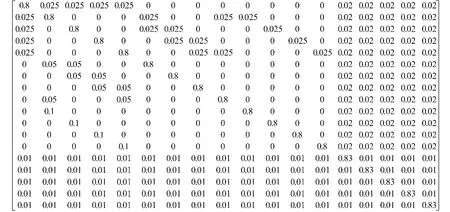
图3 M-EMA中的概率转移矩阵Fig.3 The probability sw itch matrix in M-EMA
M-EMA算法的一个运行周期如图4所示.
1)在时刻 K 基于模型集 Mf=Mk-1- Ek-1运行VSMM 算法一个递归周期 VSMM[Mf,Mk-1]获得模型的状态估计、估计误差协方差以及模型概率
2)利用AGIMM技术,在一个时间相对细化的尺度上得到对应于时刻K的变结构修正模型网格,作为期望扩张模式集 C=C(Mk-1;M(1),…,M(q));
3)运行递归 VSMM[Ek,Mk-1]获得状态估计,估计误差协方差以及模型概率
4)将模型集Mf中的模型按照模型的后验概率分为不可能、有效和重要模型,并且令不可能模型的集合为主要模型的集合为
5)如果只有有效模型,则利用最优融合准则,对S1、S3获得的估计结果进行融合,获得基于模型集合Mk=Mf∪Ek的融合结果{,进入下一个递归;
不为空令与主要模型毗邻的模型集合为Ma,则新激活的模型集合Mn=Ma∩Mk运行VSMM[Mn,Mk-1]并将估计结果与 S1、S3 获得的估计结果利用最优融合准则进行估计融合.令Mk=Mf∪C∪Mn,运行VSMM进入下一个循环;
7)如果Muk-1不为空,将其从Mk中删除,进入下一个循环,Mk=(Mf∪C∪Mn)-
3 实验与仿真
3.1 系统模型
目标状态方程和观测方程由式(5)表示:
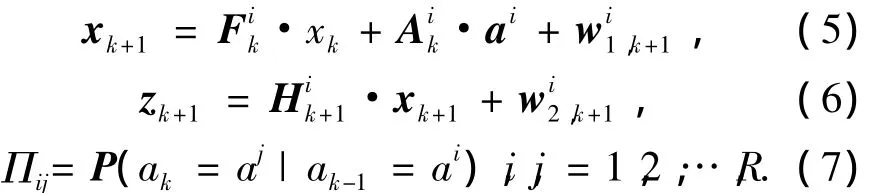
式中:xk和zk分别是状态矢量和观测矢量.ai是加速度矢量.Πij是模型ai到aj的转换概率.
3.2 仿真设计与结果
本文对二维空间上的机动目标跟踪进行仿真.状态矢量由2个坐标上的位置和速度组成,观测矢量由观测到的目标位置组成,加速度矢量由2个坐标上的加速度分量组成,过程噪声和观测噪声协方差分别.

在以下仿真中,位置和距离的单位是m,时间单位是s,速度单位是 m/s,加速度单位是 m/s2.基础网格 M 的初始模型集设为{m1,m2,m3,m4,m5},各个模型的初始概率为{u1=u2=u3=u4=u5=1/5};修正网格C中Ccen位于模型空间的中心,边缘模型分别位于中心模型的上/下/左/右,且模型间距都为10.各个模型的初始概率同M,初始状态 x0=[0,10,0,10].噪声方差 Qx=0.2,Qv=0.6,Rx=100.
本文设计了1种不同的强应动运动方式来比较和评价提出的M-EMA算法,对比算法为EMA算法和LMS算法.场景设计如表1所示,仿真时间为100 s,表中序列为目标在X和Y轴上的加速度.仿真场景:假设目标的实际加速度可以在图1(a)中的任意2个节点之间跳变,即目标作强机动.仿真结果如图4、5所示.算法在X、Y轴方向上对位置与速度的估计误差标准差统计结果如表2所示.

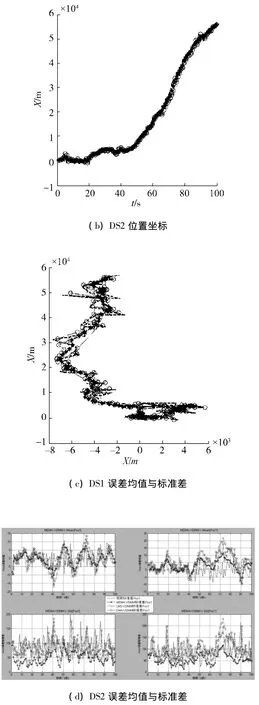
图4 M-EMA算法仿真结果Fig.4 The simulation results of M-EMA

表1 仿真场景设计Table 1 The design of simulation

表2 LMS、EMA、M-EMA算法估计误差标准差比较Table 2 The error std of LMS,EMA and M-EMA
3.3 结果分析
分析仿真结果可知,在仿真场景下,EMA算法和LMS算法会出现严重的偏离,如图4(d)中,X坐标在80 s之后发生严重偏离,Y坐标在60~80 s之间发生严重偏离,而此时的M-EMA算法无论在稳定性还是在精确性上都表现出了明显优势.
4 结论
总结全文可以看出M-EMA算法比较EMA算法和LMS算法具有一定的优势,这种优势是由于M-EMA算法从3个方面突破了EMA算法的局限性:
1)M-EMA算法从模型分布和模型数量上优化了EMA算法中的固定结构模型集;
2)M-EMA算法摆脱了EMA算法中修正模型对固定模型集的依赖,消除了由于固定结构模型集估计的不精确而导致的修正模型的偏差;
3)M-EMA算法利用移动的模型网格取代了EMA算法中单个的修正模型,进一步提高了修正模型集的修正力度.
[1]LI X R,JILKOV Y P.A survey of maneuvering target tracking——part V:multiple-model methods [J].IEEE Trans on AES,2005,41(4):1258-1263.
[2]LIX R,ZHANG Y M,ZHIX R.Multiple-model estimation with variable structure——part IV:design and evaluation of model-group switching algorithm[J].IEEE Trans on Aerospace and Electronic Systems,1999(1):242-254.
[3]LIX R,ZHANG Y M.Multiple-model estimation with variable structure—part V:likely-model set algorithm [J].IEEE Trans on AES,2000,36(2):448-466.
[4]LIX R,ZHANG Y M.Multiple-model estimation with variable structure-part VI:expected-mode augmentation [J].IEEE Trans on AES,2005,4(3):853-867.
[5]党玲,许江湖.自适应网格交互多模型算法[J].火力与指挥控制,2004,29(4):51-54.DANG Ling,XU Jianghu.Adaptive grid interacting multiple model algorithm[J].Fire Control & Command Control,2004,29(4):51-54.
[6]唐婷,何子述.一种改进的自适应网格交互多模型跟踪算法[J].信号处理,2009,25(5):816-819.TANG Ting,HE Zishu.Amodified adaptive grid interacting multiple model tracking algorithm[J].Signal Processing,2009,25(5):816-819.
[7]任继山.模型组转换算法在机动目标跟踪中的应用[J].上海航天,2007,5:54-58.REN Jishan.Application of maneuvering target trackingwith model group switching algorithm[J].Aerospace Shanghai,2007,5:54-58.
[8]杜在泉,嵇成新,关锦生.一种新的机动目标跟踪中的变结构多模型算法[J].火力与指挥控制,2010,35(6):144-148.DU Zaiquan,JIChengxin,GUAN Jinsheng.A new variable structure multiple-model algorithm for maneuvering target tracking[J].Fire Control & Command Control,2010,35(6):144-148.
[9]万永峰,嵇成新,陈阳.跟踪机动目标的一种新的多模型算法[J].火力与指挥控制,2008,33(4):120-125.WAN Yongfeng,JI Chengxin,CHEN Yang.A new multiple-model algorithm for tracking maneuvering target[J].Fire Control& Command Control,2008,33(4):120-125.
[10]刘士建,郭立,李士民.变结构多模型估计单Kalman滤波跟踪机动目标算法[J].电路与系统学报,2003,8(5):28-32.LIU Shijian,GUO Li,LIShimin.Variable structure multiple-model and single Kalman filter algorithm for tracking maneuvering target[J].Journal of Circuits and Systems,2003,8(5):28-32.
[11]伍明,孙继银.一种机器人未知环境下动态目标跟踪交互多模滤波算法[J].智能系统学报,2010,5(2):127-139.WU Ming,SUN Jiyin.An interacting multiple model filtering algorithm for mobile robots to improve tracking of moving objects in unknow environments[J].CAAI Transactions on Intelligent Systems,2010,5(2):127-139.
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
装备制造技术(2020年3期)2020-12-25 05:21:52
法律方法(2019年4期)2019-11-16 01:07:28
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50