RANSAC平面估计算法在路面物体体积测量中的应用*
2012-10-21 03:44:38杨云涛
传感技术学报 2012年3期
曹 毓,冯 莹,杨云涛,陈 晗
(国防科学技术大学光电科学与工程学院,长沙 410073)
在使用车载单线式激光扫描仪以运动中扫描的方式获取路面三维重建结果的应用中[1-7],扫描仪安装高度误差和路面沉降等因素会导致点云数据出现失真,影响路面三维重建结果的精度。在使用存在误差的点云数据实施路面目标物体体积计算时,会导致计算结果误差较大。
本文针对上述问题,使用RANSAC平面估计算法获得了路面的0高度平面,提高了路面目标物体的体积计算精度。随后的实验证明,该方法降低了对扫描仪的安装精度要求,可快速获取高精度的路面三维形貌数据,从而准确的计算出路面目标物的体积。该方法可应用于地震、泥石流等自然灾害导致的路面塌方、滑坡等情况下的灾情快速勘测和抢修中。
1 路面点云的RANSAC优化
1.1 路面三维重建系统工作原理
图1所示为基于车载激光扫描的路面三维重建系统工作原理示意图。图中扫描仪架设于车顶,在车辆行驶过程中向下倾斜扫描路面。扫描仪单次扫描获得的是一条由若干点组成的扫描线,所有扫描线构成的点云给出了路面详细的三维形貌信息。
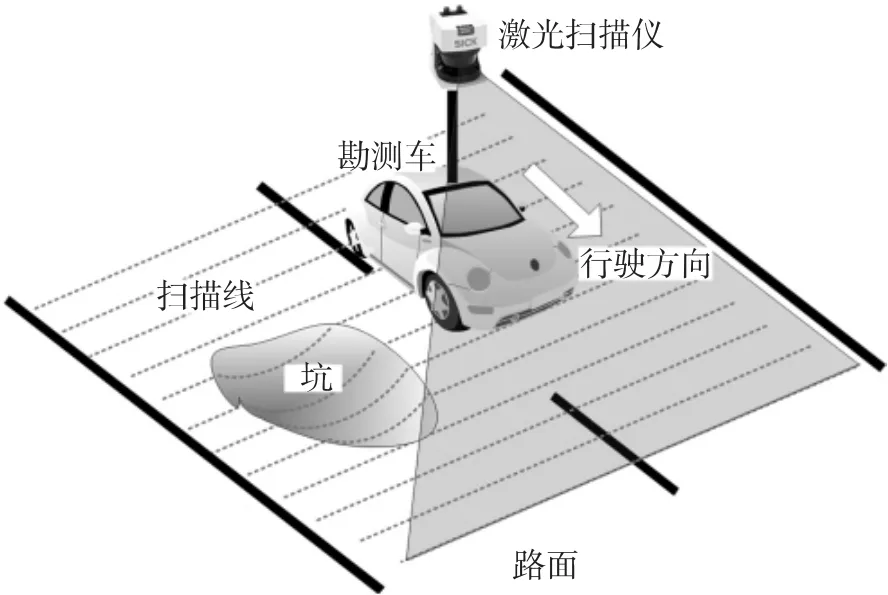
图1 路面三维重建系统工作原理图
对于形状不规则的路面目标物,一般方法较难快速准确测量出其体积,传统的做法是将目标物近似作为圆台或圆锥等规则形状物体处理[8-9],而且需要人工用皮尺等工具测量其尺寸,速度慢、效率低,得到的体积数据误差较大。有鉴于此,采用了基于路面三维点云数据的物体体积非接触测量方法,该方法通过运动中扫描的方式获得路面三维点云,然后选择出目标物体对应的点云区域,并对其实施点云优化和Delaunay三角剖分,在获得以三角网格给出的目标物三维重建结果后可计算出其体积。图2给出了基于路面三维点云数据的物体体积测量方法的具体流程图。由于采用基于激光扫描的非接触测量方式,该方法无需过多人工干预,自动化程度高。点云的精度是影响路面目标物体积测量精度的主要因素,路面0高度平面的获取是高精度体积测量的前提和关键环节。
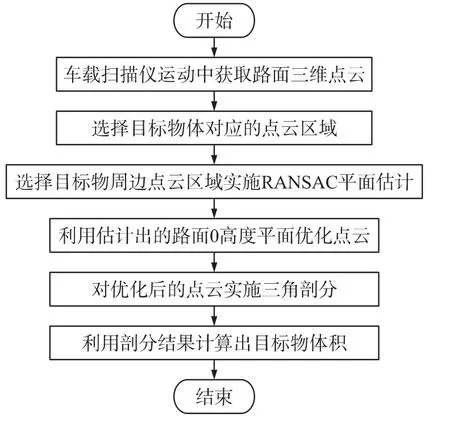
图2 路面目标物体积测量流程图
1.2 基于RANSAC平面估计的路面0高度平面获取
在利用路面三维点云实施目标物体积测量时,扫描仪安装高度的实际值和标定值可能会有误差,且因道路塌方等因素导致的路面的沉降等也会导致扫描仪高度发生变化,这都会使得点云数据在垂直路面的高度维坐标产生整体偏移,由此导致目标物体积的计算结果出现误差。为此,首先需要获得目标物附近路面的0高度平面,本文将图像拼接领域常用的随机抽样一致性算法RANSAC(RANdom SAmple Consensus)[10-12]引入路面三维点云 0 高度平面估计的应用中。该方法利用匹配点集合的内在几何约束关系剔除错误的匹配,并根据正确的匹配点集合估计出模型参数。它能处理数据集合中外点大于50%的情况,是一种稳健的模型估计方法。
为获得道路的0高度平面,选取用于RANSAC估计的点云数据的范围至关重要。路面目标物本身一般为坑或落石等不规则物体,其自身点云数据不能用于平面估计,应将其剔除。为此,将目标物周围的四个矩形区域作为点云选择范围,如图3所示。

图3 平面估计的点云选取范围
当目标物位于道路边缘时,图3中四个矩形区域中的其中一个可能并不包含点云数据,剩余三个区域仍可实现平面估计。矩形区域的尺寸要综合考虑精度和速度因素来选择:若区域选择过小,受路面碎石等目标物的干扰,会导致估计出的0高度平面误差较大;若区域选择过大,会由于计算量大而降低运算速度。
首先建立RANSAC平面估计的目标模型为:cX+dY+eZ=f。其中X-Y-Z 坐标系约定如图3 所示,c,d,e,f分别为待估计参数。将原始点云数据根据建立的模型使用RANSAC平面估计算法,可获得参数c,d,e,f的值。对于一般的平坦路面,估计出的平面参数c,d≈0,其表达式可近似写为Z=f/e。其中f/e可认为是扫描仪的高度误差量。将待求体积的目标物点云数据的高度维坐标统一减去f/e,即可由修正后的点云精确获取目标物的体积数据。
2 实验及结果分析
我们设计实验验证了路面0高度平面估计算法对路面目标物体积测量精度的影响。图4给出了实验场景图。图中扫描仪架设高度约3.5 m,架设时为扫描路面向下有一定的俯角。
首先使用挖掘机在某废弃道面开挖一个不规则形状的坑,将其作为待测体积的目标物,如图5(a)所示。为了获得该坑的真实体积数据,采用“注水法”进行了测量:首先使用防水布覆盖在坑表面并踩实,然后向坑内注水,直到将水注满、水平面和坑边沿平齐为止,如图5(b)所示。计算注入水的体积即可获得坑的实际体积。采用注水法实际测量得到的该坑体积为2.25 m3。
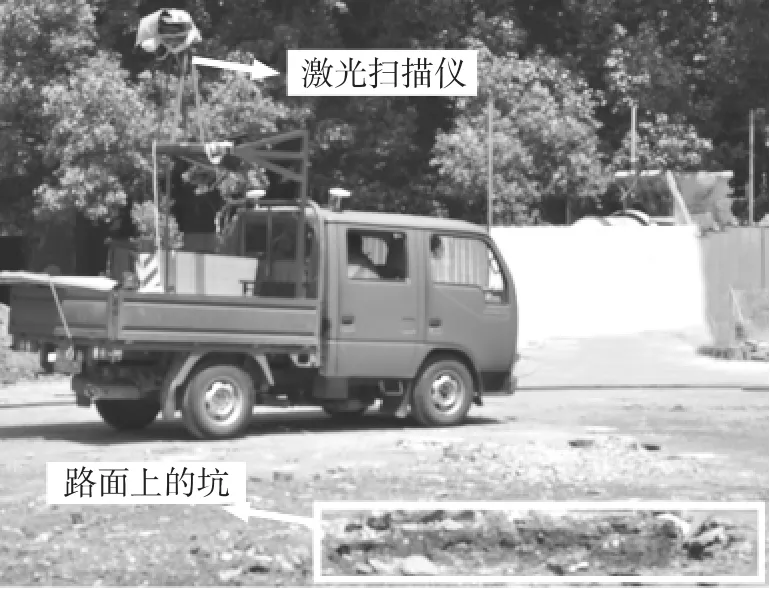
图4 实验场景
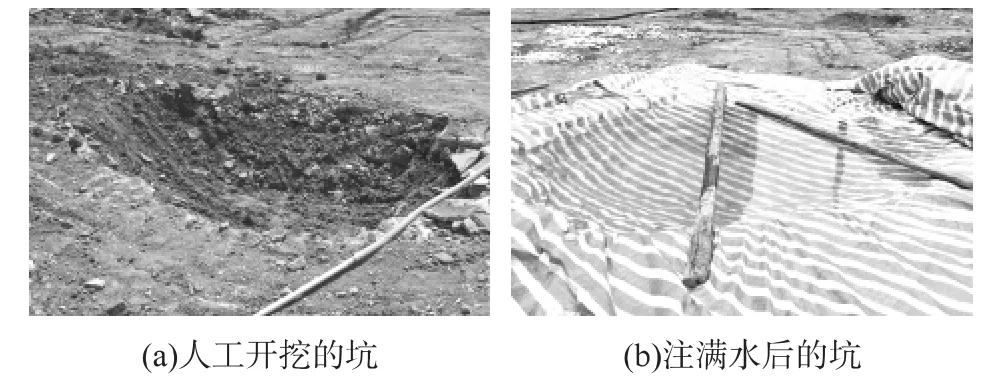
图5 注水前后的坑
图6给出了根据激光扫描结果获得的坑的三维点云伪彩色图,图中的不同颜色(灰度)代表了不同深度值。对比图5(a)可看出,三维重建结果的轮廓与坑的实际形貌吻合较好。图7为坑点云的三角剖分结果,从图中剖分出的三角形大小可以看出,坑距离车辆较近一侧相较另一侧而言,点云明显稀疏一些,这是由于在扫描仪倾斜扫描状态下坑自身遮挡导致的,坑的边沿越陡峭该问题越严重。这会导致对坑体积的测量值偏小。车辆对坑实施近距离扫描可以有效避免该问题。
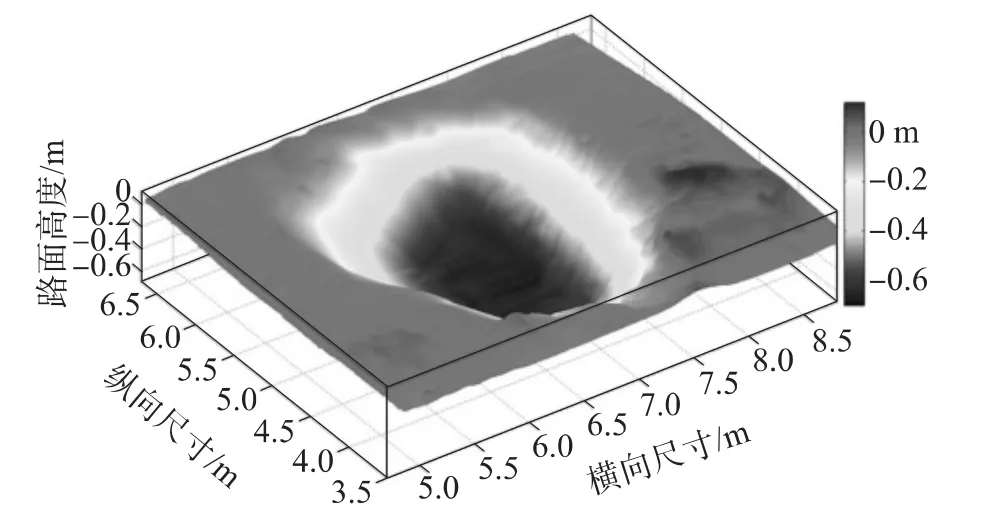
图6 坑的三维形貌重建结果透视图
从三维重建结果侧视图(图8)发现,坑边沿的路面高度并非为零,这可能是由于扫描仪的真实安装高度和标定值之间出现误差所致,也可能是路面整体沉降造成的。由于路面高度的整体抬高,导致由坑的修正前点云数据计算体积时结果显著偏小。本次实验中计算出的该坑体积约为1.86 m3,和注水法测量的体积2.25 m3相比,误差为17.3%。
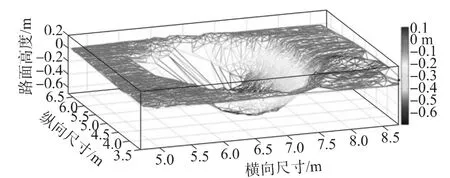
图7 坑点云的三角剖分结果
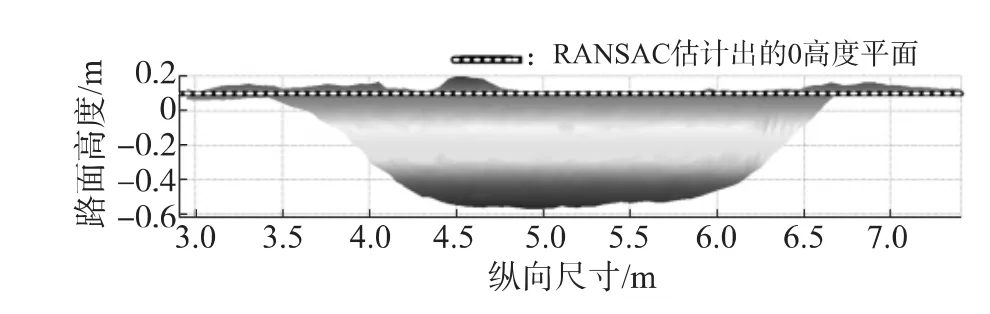
图8 坑的三维形貌重建结果侧视图
选择坑周围四个边长5 m的正方形区域内的路面点云数据实施RANSAC平面估计,得到路面的0高度平面(如图7中的黑色实线所示)平均抬高约0.11 m。在对坑的点云数据实施0高度平面修正后,计算出的该坑体积约为2.10 m3,与注水法测量的体积2.25 m3相比,误差为6.7%。该误差的出现主要由以下几个因素导致:①为了更好的模拟真实的情况,开挖的坑形状不规则,其体积的准确获取较为困难,由“注水”法得到了坑的体积数据难免存在一定程度的误差。②由于坑自身遮挡效应的影响,导致三角剖分得到的坑内部靠近车辆一侧的三角面片过少(图7所示),不能精确描述真实坑的三维形貌,由此引入体积计算误差。③扫描仪本身的测距精度为1 cm,这会导致点云数据出现误差,进而影响到最终的体积计算结果。
此外,本方法的点云优化速度快,使得路面目标物体的体积测量效率较高。本次实验中,从车辆启动开始工作计时,到程序获得坑的三维重建结果及体积数据,共耗时约50 s,其中传感器采集数据耗时22 s,基于RANSAC平面估计的点云优化耗时约7 s、点云三角剖分、体积计算等耗时约3 s,其它数据处理工作耗时约18 s。实验使用的计算机主要配置为:CPU为Intel Core2 Duo Processor 2.8 GHz,使用4GB 双通道内存。
3 结论
本文分析了一种应用于路面三维形貌重建和目标物体积测量的点云优化方法。实际测试结果表明,经点云优化后,基于激光扫描的路面物体体积测量方法相对于传统方法而言,提高体积测量速度的同时在测量精度上也有大幅度提升。
需说明的是,本文方法不但适用于路面上的坑的体积测量,对于测量路面上的落石等障碍物的体积也是适用的。但是,本文的点云优化方法存在应用局限性。对于损毁严重以至于很难找到平整区域的路面,该方法可能会导致路面0高度平面的估计误差较大,从而降低路面物体体积计算精度。下一步工作是深入研究该点云优化方法的应用条件,进一步提高其适用性和稳健性。
[1]曹毓,冯莹,杨云涛,等.基于灭点查找的姿态角测量方法在路面三维重建中的应用[J].传感技术学报,2011,24(7):1081-1086.
[2]Yu Cao,Ying Feng,Yun-jin Chen,et al.A Method of 3D Scene Reconstruction with Vehicle-Borne Laser Scanner Based on Monocular Visual Positioning,Proc.SPIE 8192,3K(2011),doi:10.1117/12.900981.
[3]Yu S,Sukumar S R,Koschan A F,et al.3D Reconstruction of Road Surfaces using An Integrated Multi-Sensory Approach[J].Optics and Lasers in Engineering,2007,45:808-818.
[4]http://www.cirgeo.unipd.it/cirgeo/convegni/mmt2007/proceedings/papers/brun_xavier_1.pdf.
[5]Sukumar S R,Yu S,Page D L,et al.Multi-Sensor Integration for Unmanned Terrain Modeling[C]//SPIE Unmanned Systems Technology Ⅷ,2006,6230:65-74.
[6]Früh C,Zakhor A.An Automated Method for Large Scale,Ground Based City Model Acquisition[J].Int.J.Computer Vision,2004,60(1):5-24.
[7]Borrmann D,Elseberg J,Lingemann K,et al.Globally Consistent 3D Mapping with Scan Matching[J].Robotics and Autonomous Systems,2008,56(2):130.
[8]芦子龙,曹巨辉,杨秀文.机场跑道可见弹坑工程量快速确定模型[J].后勤工程学院学报,2008,24(4):9-12.
[9]张少纯,张北光,宋显宏,等.反跑道弹药道面下爆炸破坏效应试验研究[J].机场工程,2004,增刊:60-75.
[10]Fischler M A,Bolles R C.Random Sample Consensus:A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[J].Communications of the ACM,1981,24:381-395.
[11]Schnabel R,Wahl R,Klein,et al.Efficient RANSAC for Point Cloud Shape Detection[J].Computer Graphics Forum,2007,26(2):214-226.
[12]Chum O,Matas J.Optimal Randomized RANSAC[J].Pattern A-nalysis and Machine Intelligence,2008,30(8):1472-1482.
猜你喜欢
软件(2020年3期)2020-04-20 00:56:34
光学精密工程(2016年6期)2016-11-07 09:07:56
试题与研究·高考数学(2016年1期)2016-10-13 10:40:58
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
肇庆学院学报(2016年5期)2016-03-11 18:09:18
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
中国医疗美容(2015年1期)2015-07-12 10:05:59
现代营销·经营版(2015年3期)2015-04-20 06:46:58
数学教学通讯·初中版(2014年12期)2014-04-29 00:44:03
现代营销·经营版(2013年5期)2013-05-14 14:55:04