
140 km/h隧道弓形腕臂悬挂验收技术方案的编制与实施
2012-10-20 09:49:50中铁七局电务工程有限公司
河南科技 2012年14期
中铁七局 电务工程有限公司 郭 峰
140 km/h隧道弓形腕臂悬挂验收技术方案的编制与实施
中铁七局 电务工程有限公司 郭 峰
由中铁七局电务公司承建的黔贵铁路ZH1标电气化接触网工程,以柳州站(含)为起点,泗亭站(含)为终点,起止里程为K0+000~K306+600 km,线路正线长306 km。笔者所在项目部负责南宁铁路局站后一标段施工,该标段桥隧密集,有隧道66条,隧道施工是重点、难点。加之该标段地质情况复杂,山高坡陡,属喀斯特地貌和贵州高原相结合地形,工程任务十分艰巨。
黔贵线140 km/h隧道内悬挂采用的是中铁第二勘测设计院和中铁电化局宝鸡器材厂联合研制设计的国产化的单支撑腕臂悬挂定位方式(简称弓形腕臂)。弓形腕臂的检验验收在国内尚属首次,没有标准的检验验收标准,项目部在负责编制技术验收方案和组织实施的过程中,通过与中铁第二勘测设计院和中铁电化局宝鸡器材厂工程师共同研究,制定了符合国产单支撑腕臂悬挂定位方式的检验验收方案,并通过了南宁铁路局建设指挥部和南宁铁路局相关运营单位的认可,在2007年3月27日成功进行了检验验收工作,使得单支撑腕臂悬挂定位方式最终得以在黔贵线正式使用。
一、弓形腕臂悬挂检验验收组织实施概况
2008年3月27日,由中国中铁七局电务公司黔桂电化项目经理部组织,南宁铁路局建设指挥部、南宁铁路局总工办、南宁铁路局机务处、铁道部第二勘测设计院、南宁铁路局柳州供电段、中原铁路建设监理公司等有关部门30多位专家和单位负责人对威明隧道140 km/h隧道接触网弓形腕臂结构方式进行检查验收。这是国内首次独立设计、研发、施工和验收140 km/h弓形腕臂的安全性和可靠性,验收方案的制订及实施过程由笔者所在单位负责。
笔者所在的项目部在参考德国西门子公司设计的弓形腕臂在渝怀线的验收方案和电气化工程局宝鸡器材厂产品图纸的基础上,结合铁道部第二勘测设计院设计要求以及《铁路电力牵引供电工程施工质量验收标准》TB10421–2003中的有关要求,在兼顾验收施工安装质量和厂家产品质量的前提下,编制了验收方案。该方案共三部分,第一部分是对现场已经安装的悬挂点进行抽检,重新验算其测量、计算、安装及产品加工尺寸的准确性;第二部分是在静止状态下,受电弓对各固定点的安全距离进行测量检测;第三部分是对弓形腕臂整体安装调整完成后,在列车高速运行时,当受电弓出现极限摆动情况下弓形腕臂是否碰撞其固定结构零件进行检测。本文,笔者主要分析了编制和组织实施140 km/h隧道接触网弓形腕臂结构方式的检查验收过程,以期对同行有所参考。
二、140 km/h隧道国产接触网弓形腕臂结构方式简介
目前,在国内电气化铁路单线隧道内,接触网采用的为水平悬挂方式,这种悬挂方式在我国的应用已超过30 a。实际运营情况表明,该悬挂方式稳定可靠,适用于中、低列车运行,随着我国铁路运输事业的发展,主要干线的列车运行速度大幅度提高,在这种情况下,传统的悬挂方式已经不能适应列车运行的需要。列车提速后,受电弓震动量变大,原定位部分的棒式绝缘子已经伸到受电弓的工作范围内,成为安全隐患,2000年以前,弓形腕臂的悬挂方式在日本、英国、法国、瑞士等国家被大量采用,2004年在渝怀铁路上,我国引进了西门子公司的第一代弓形腕臂,积累了一定的施工安装和运行经验。西门子公司对弓形腕臂的设计、生产、和检验验收全程负责,国内仅负责弓形腕臂的安装工作和安装验收完成后的使用,由于国外公司技术保密,我国企业仅积累了一定的安装经验。中铁电气化工程局宝鸡器材厂对国外产品进行了技术吸收和改进,完成了产品的国产化,到目前为止,对弓形腕臂安装成型后的检验验收在国内还是空白。
鉴于国内尚没有针对性的检验验收标准,黔桂线的建设单位南宁铁路局要求中铁七局电务工程有限公司编制检验验收方案并由笔者所在单位负责组织实施。检验验收地点为黔贵线打场至南丹区间的威明隧道,试验锚段全长1 754 m,由隧道外南丹车站21号杆起锚至威明隧道内17号下锚,威明隧道内共33个悬挂点,隧道外共14个悬挂点,试验段内包括了140 km/h直线段和曲线段,同时包括中心锚节和补偿下锚等典型设计安装形式,隧道净空高度6 650 mm。隧道内接触网采用全补偿简单链型悬挂,承力索采用THJ95铜合金绞线,承力索张力15 kN,接触导线采用CTHA120型铜合金导线,导线张力15 kN。接触线悬挂点高度5 750 mm,结构高度530 mm,采用可调节式整体吊弦。
三、已安装悬挂点的抽检
1.试验检验工具。主要用到的工具及其数量见表1。
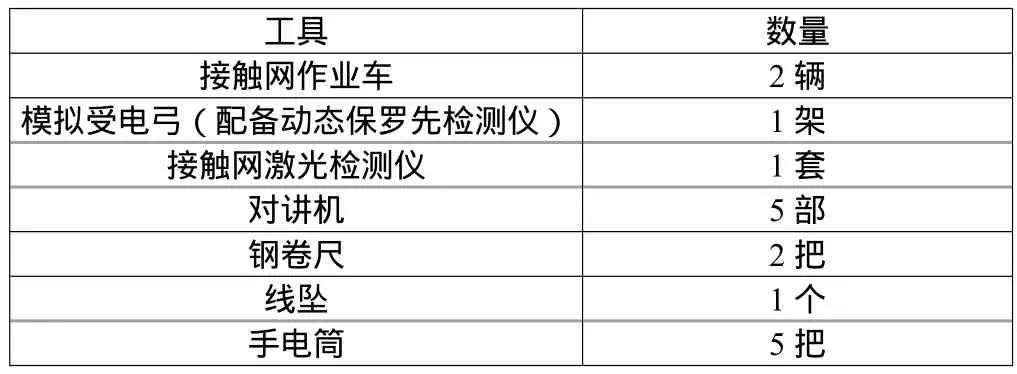
表1 试验检验工具
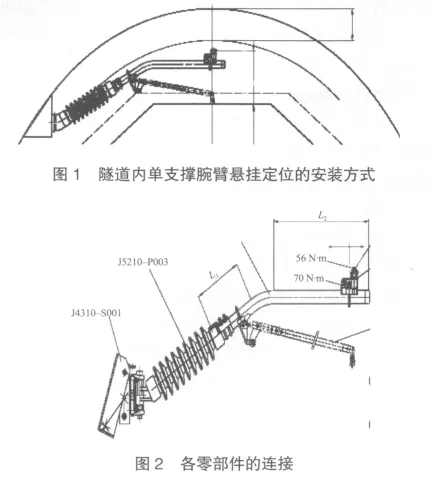
检查验收工作是对施工单位和厂家产品的综合检验,在检验前,首先要对施工安装定位和厂家腕臂加工生产程序进行理论数据的检查和验收,并对施工过程中的相关测量进行复测。在隧道内单支撑腕臂的计算首先需要保证承力索座顶部距隧道顶部的绝缘距离和腕臂外露端距离另一侧隧道壁的绝缘距离符合设计要求。为保证安装、调整一次到位,腕臂预制需要列出拉出值、定位器型号的选择、接棒瓶端的腕臂切割长度、腕臂外露端的切割长度、承力索座U形环距腕臂上水平刻划线的距离、定位器底座U形环距腕臂上斜边刻划线的距离。隧道内但支撑弯臂悬挂定位的安装方式如图1所示,各零部件的连接如图2所示。
需要测量的数据包括定位点隧道壁距棱镜的水平距离L,隧道底座相对于竖直方向的夹角α及打点处距离轨面的高度h。首先,需要计算出底座的测量点到线路中心的水平距离,这需要分部计算出底座、棒瓶的水平长度和弯曲型腕臂两刻划线的水平距离,再根据测量数据计算出检测需要的数据。
1.腕臂底座部分的计算。底座结构如图3所示。
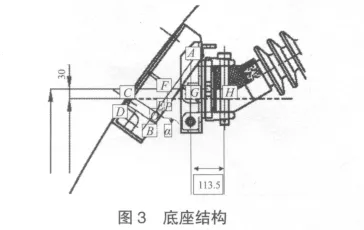
根据图3中的几何关系可求出CH的长度。经测量可知,AB=270 mm,DB=CQ=90 mm,GH=113.5 mm,FP=30 mm,∠BAG=α。则有CF=90/cosα,BE=90tanα,EF=30/cosα,AF=AB-BE-EF;FG=AF sinα=(270-90tanα-30/cosα)sinα,CH=CF+FG+GH=90/comα+(270-90tanα-30/cosα)sinα+113.5。
2.棒瓶部分的计算。棒瓶结构如图4所示,棒瓶结构的几何关系如图5所示。


由图4和图5计算出MN和NT的长度,有
MN=KM tan30°=80 tan30°=46.2 mm。
NT=750cos30°=649.5 mm。
3.弯曲型腕臂部分的计算。弯曲型腕臂各结构的几何关系如图6所示。
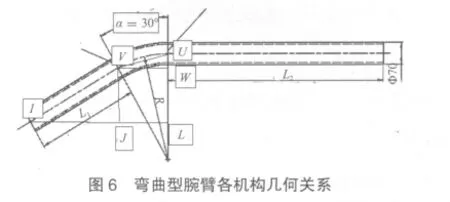
V和U均在腕臂的刻划线上,设U在水平刻划线上,V在斜边刻划线上,普通定位用的弯曲型腕臂L1=600 mm,L2=1 210 mm,R=500 mm。弯曲型腕臂连接到棒瓶的长度为85 mm,需要求出IJ和VW的长度。I点是棒瓶与腕臂的连接处。根据图6的几何关系可知,IJ=(L1-85)cos30°=446 mm,UV=2(R sin15°)=258.8 mm,VW=UV cos15°=250 mm,UW=UV sin15°=67 mm。
4.汇总计算程序。根据如下公式组进行汇总计算。
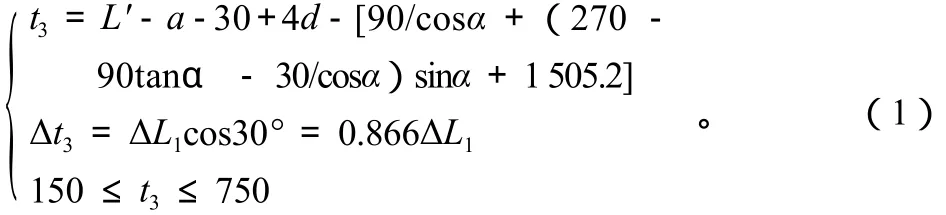
由式(1)可以确定ΔL1的长度,同时也就确定了t3和定位器底座U形环距斜边刻划线的距离L1′,再根据t3确定定位器的型号,确定ΔL2。该公式在施工中基本上能确保安装调整一次到位。
5.注意事项。在现场验收过程中,要注意以下事项。
(1)下锚处承力索座与下锚接触线斜拉线棒的绝缘距离要符合《铁路电力牵引供电工程施工质量验收标准》TB10421–2003中有关绝缘安全距离的要求。
(2)定位器底座处的顶紧螺栓起限位作用,需调整限位螺栓的位置,保证定位器的抬升在100 mm范围内起到限位作用。
(3)绝缘锚段关节检查工作支和非支安装位置要正确。
四、静止状态下受电弓对各固定点的安全距离的测量检测
1.接触网的静特性和动特性分析。主要包括以下几个方面:接触线的高度(最高高度及最低高度)、在运行中接触悬挂的弹性性能及受电弓的实际运行轨迹、接触线的高度变化曲线、沿跨距内接触线和受电弓间的接触压力、接触悬挂–受电弓振动系统的最大振幅、接触悬挂和受电弓的接触状态(离线情况)、受电弓的静态特性和动态特性、接触线拉出值及偏移值、在锚段关节及道岔处接触线的相对位置、特殊硬点测量等。
2.检测具体事项。根据弓形腕臂结构的检验要求,主要对接触线的高度(最高高度及最低高度)、在运行中接触悬挂的弹性性能及受电弓的实际运行轨迹、接触线的高度变化曲线、接触悬挂–受电弓振动系统的最大振幅、接触悬挂和受电弓的接触状态、受电弓的静态特性和动态特性、接触线拉出值及偏移值及在锚段关节及道岔处接触线的相对位置,进行测量检测。
3.现场检测时,作业车在运行过程中,由运营单位负责人随机命令停车,指定悬挂点对弓形腕臂各点距离固定接地体的安全距离进行测量,并添表签认,作为检查原始记录。在静态测量中,按照《铁路电力牵引供电工程施工质量验收标准》TB10421–2003中的有关要求,设计制作了140 km/h隧道内悬挂检验验收记录,需记录的具体内容见表2。
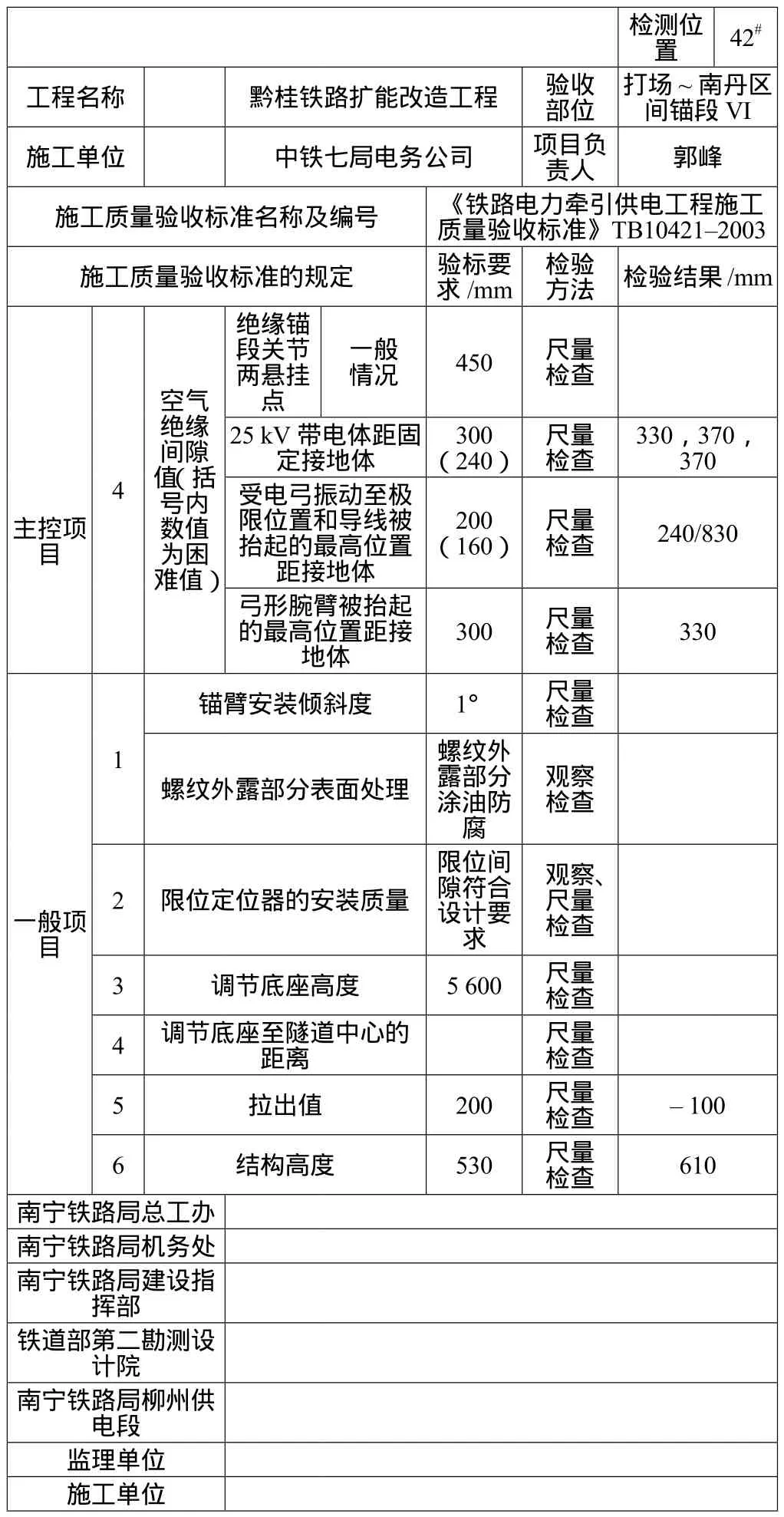
表2 140 km/h隧道内悬挂检验验收记录的具体内容
通过动态和静态检查验收,弓形腕臂各项检测参数均满足规范要求。
五、安装调试后弓形腕臂安全性检验
由于威明隧道目前尚未开通,故使用模拟受电弓对整体安装完成的弓形腕臂进行静态试验,但仅能检测出静态情况下,弓形腕臂与受电弓的弓网关系以及受电弓对固定接地体的安全距离。在列车速度达到140 km/h的情况下,受电弓振动量大,在受电弓极限位置,即受电弓向上振动120 mm、左右摆动250 mm的情况下,受电弓必须保持平稳运行,不能剐碰到弓形腕臂的任何位置,特别是定位环。为了尽可能模拟出受电弓在动态运行的情况下的弓网关系,笔者在现场设计制作了受电弓动态包络线,模拟出在受电弓极限工作的情况下,受电弓距离弓形腕臂各接近点的极限距离,并进行了记录;通过试验测量,在电力机车以设计最高速度140 km/h运行时,受电弓没有剐碰到弓形腕臂的任何位置,证明了弓形腕臂的结构方式满足在受电弓极限工作的情况下的安全运营。
六、结论
由中铁七局电务公司黔贵电化项目经理部组织验收的威明隧道内接触网单支撑腕臂悬挂(弓形腕臂)新技术于2008年3月27日通过了专家组的验收。这标志着中铁七局电务公司黔贵线接触网工程填补了一项重要的国内施工验收技术空白。隧道内单支撑腕臂悬挂的试验成功,不仅解决了国外新工艺在国产化后检验验收的标准问题,也为今后同类施工检验验收提供了经验和参考验收标准。
猜你喜欢
西南交通大学学报(2021年2期)2021-06-06 08:39:00
铁道机车车辆(2021年2期)2021-05-21 01:54:32
防爆电机(2020年4期)2020-12-14 03:11:16
时代农机(2018年12期)2018-02-14 06:07:22
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:42
上海铁道增刊(2017年2期)2017-04-18 06:50:30
高原山地气象研究(2016年2期)2016-11-10 06:06:36
电子世界(2016年16期)2016-03-14 09:27:49
电气化铁道(2015年2期)2015-06-29 10:05:40
云南畜牧兽医(2015年4期)2015-02-28 21:26:11
