一种新型无线传感器网络分布式定位算法
2012-10-20 02:28杨小勇
无线电通信技术 2012年3期
杨小勇,杨 荣,李 彬
(1.国家无线电频谱管理研究所,陕西西安 710061;2.西安交通大学智能网络与网络安全教育部重点实验室,陕西西安 710049)
0 引言
在无线传感器网络中,传感器节点定位是无线传感器网络应用的重要条件。定位方式种类繁多,但总体分2大类:一种是基于非测距的(Rangefree),例如质心法[1]、DV-Hop 算法[2]、APIT 算法[3];一种是基于测距的(Range-based),例如 RSSI[4]、AOA[5]、OA[6]、DOA[7]等定位算法。Rangefree方法利用传感器节点之间信息交互获得位置信息,设备简单,但定位精度较差;Range-based方法利用无线电测距,例如利用无线电相位信息或无线电信号强度(RSSI)随距离衰减的特性。利用无线电信号强度随距离衰减特性的定位算法,设备简单但精度较差;利用相位算法精确度较好,但造价较高且设备复杂,能耗高。
在实际应用中,通过飞机或炮弹等设备将无线传感器节点撒布到人难以到达的地方(如无人区)是一种重要的布置传感器节点的方式,它要求传感器节点不但成本低、体积小、能耗低,还需具有数量大、分布区域广的特点。这里提出的定位方法利用了飞机辅助手段,对大量未知节点进行分布式定位,正是针对以上应用场景的特点提出的。
1 定位系统的网络结构
本文提出的射频干涉与测量多普勒频偏相结合的节点定位方法,利用一个固定锚节点和一个移动锚节点(如飞机)形成射频干涉场,移动锚节点水平匀速移动产生多普勒效应。2个发射节点发射的射频信号频率十分接近,接收节点收到的叠加信号具有低频包络;同时由于多普勒效应[8]的存在,低频包络信号的频率会随着移动锚节点的移动发生变化。各节点可通过测量自身低频RSSI(接收信号场强指示)信号的瞬时频率的变化规律获得未知节点与飞行路径相对位置信息。移动锚节点交叉运动,融合多个相对位置信息,未知节点就可以获得自己的绝对位置信息。
首先介绍定位系统的网络结构,该定位系统由一个固定锚节点、一个移动锚节点及大量未知节点组成。固定锚节点与移动锚节点发射频率相近的单频信号,信号强度足以覆盖全网。移动锚节点配备有GPS设备,并实时广播自己的GPS信息。移动锚节点(如直升飞机或无人驾驶机)在定位区域内做低空交叉直线飞行,网络结构如图1所示。图1中A为移动锚节点,B为固定锚节点,m为待定位的无线传感器节点。AA'、A'A″是移动锚节点的2条飞行路线,箭头指向的是运动的方向。p、q分别是飞行路线上过点m作的垂线的垂足,移动锚节点运动距离足够长。

图1 定位系统的网络结构示意图
这里采用的定位方式是二维定位,以下部分都是将飞行路径与未知节点映射到二维平面分析的。未知节点接收射频干涉信号,由于移动锚节点移动,未知节点处测得的射频干涉信号的频率中含有多普勒频移,分析频率的变化从而实现定位是本算法的核心内容。
2 射频干涉原理
移动锚节点A和静止锚节点B分别发射频率相近(如相差1 kHz左右)的单频信号 cos(2πfAt+φA)和cos(2πfBt+φB)。假设在LOS环境中的某个时刻,未知节点m与A、B的初始距离分别为dAm和dBm,如图1所示。节点m接收的射频干涉信号可以表示为:

对射频干涉信号进行下变频得到的基带复信号为:

式中,fn为进行下变频时节点的本振频率。
所以,节点m得到的接收场强指示(RSSI)信号可以表示为:

由式(13)可知RSSI信号的频率为‖fA-fB‖,fA、fB十分接近(如相差1 kHz),节点利用自身的简单设备就可以实现低频干涉信号频率的测量。该方法的优点是很多芯片都具有RSSI的输出,采用低速的AD即可解决RSSI信号的采集问题,不需要使用额外的收发设备。
3 多普勒频偏分析和处理
在图1所示的网络中,移动锚节点在定位区域上空匀速直线飞行时产生多普勒效应,未知节点收到的RSSI信号的频率会随着移动锚节点的移动发生变化,节点通过测量实时地获得RSSI信号的频率。需要注意的是,图1所示的二维平面是以未知节点和飞行路径确定的二维平面,故垂点位置信息为经纬度信息,在定位时要求移动锚节点飞行的距离足够长。
根据多普勒频移公式,未知节点获得的RSSI信号的频率为:

fA与fB分别是移动锚节点和固定锚节点发射的射频信号频率,ΔfA与ΔfB是由本地晶体振荡器引起的频偏。移动锚节点的飞行速度设为v,如图1所示θ为连线 Am 与飞行路线的夹角。(xn,yn)、(xp,yp)、(xm,ym)分别为 A、p、m 所处位置坐标。式(4)中fm(θ)对θ求导可得:

由式(5)可知,RSSI信号的频率变化时斜率绝对值最大点对应的θ为90度,即对应的点xn=xp,yn=yp。为了得到斜率绝对值最大点,对移动锚节点的移动路径进行等间距采样,根据式(6)对采样点的频率做差分得到的曲线如图2所示。


图2 对采样点的频率进行差分
图2的曲线在垂足处有个陡然的上升,峰值点为垂足位置。由于移动锚节点实时广播自己的GPS信息,未知节点可获知这个垂足GPS信息,从而为下一步定位算法提供辅助信息。对fn(θ)做差分,在找到频率变化最大点的坐标的同时,可以有效地消除频偏带来的误差,从而避免了复杂的频偏估计算法,使整个定位算法简单实用。
该文的定位算法是通过获得图2曲线中最高点来计算未知节点相对位置信息的,因此可以对图2的曲线作平滑处理,使得最高点的判断更为准确。
4 节点位置估计原理
由于未知节点实时接收移动锚节点的GPS广播信息,故可以得到移动路径与未知节点的垂线的垂足(图1中的p、q)处的GPS信息和移动节点移动的方向。移动锚节点按图1所示的路线移动。垂足p和q的GPS信息可由第3部分介绍的方法得到,过点p和q作移动路径的垂线,2个垂线的交点即为未知节点的位置。设未知节点坐标(x,y),p点坐标 (px,py),q 点坐标 (qx,qy),m1、m2分别是 2条飞行路径的斜率,可得式(7),求解式(7)就可以得到节点的位置。


该方法利用干涉测频,节点仅需测量低频干涉信号,这降低了设备硬件的复杂度;通过对接收频率的差分,可以简单有效地消除频偏的影响;而利用多次飞行定位,定位的准确度得以提高。在整个定位过程中,未知节点只是远距离接收锚节点大功率广播的信号而无需发送,能耗较低,适合于大规模网络中进行定位。
5 实验仿真
在仿真中,假设16个未知节点散布在1 km的二维平面范围之内,移动锚节点为直升机或者无人驾驶机,移动锚节点实时广播GPS信息并做低空飞行,飞行高度为170 m,发射的射频信号频率6 GHz,移动速度为60 m/s,固定锚节点发射频率比移动锚节点高200 Hz,未知节点频率瞬时估计误差为随机误差,方差为2。算法中作差分计算的间隔是1 m,并且为了计算方便,设定移动锚节点在待定位区域上空做东西方向飞行和南北方向飞行;交叉飞行完成后,就可对未知节点做出定位。为了提高定位精度,可在定位区域上空作多次交叉飞行,仿真中假设东西飞行12次,南北飞行12次,每次东西飞行路径相隔70 m,南北亦同。图3(a)为定位的结果,圆圈为待定位节点的真实位置,小十字为估计位置。可以看出多次定位的结果均分布在真实值周围,将上述过程重复50次,即取12*16*50次统计,得出误差如图3(b),结果表明误差范围在4 m以内,平均误差为2 m,考虑到自身作差分的量化误差是1 m,认为平均误差为3 m。

图3 仿真实验的定位结果和误差统计
飞行路径与未知节点之间的距离为定值时,锚节点的移动速度与定位误差的关系如图4所示,其中设定未知节点频率估计方差为2;飞行路径与未知节点之间的距离为定值时,未知节点频率估计方差与定位误差的关系如图5所示。

图4 移动锚节点的移动速度与定位误差的关系

图5 未知节点频率估计方差与定位误差的关系
在搜索图2中的峰值时,可以分别采用平滑和非平滑的方法,得到的结果如图6所示,前者比后者可提高1 m左右的精度。图2的峰值和飞行路径与未知节点间距离d的关系如图7所示(注:设定移动锚节点移动速度60 m/s(即直升机的飞行速度),移动锚节点发射的射频信号频率6 GHz)。由于采用了RIPS射频干涉的方法,检测到的RSSI信号频率很低(如设定为2 kHz左右),未知节点采用不是很昂贵的设备就可以检测出图2频率的变化值。但是如图7的仿真结果所示当d变大时,差分的峰值将会变小。当干扰较大时,距离d越远,峰值的易于检测性就越弱。因此,针对远距离、大范围节点进行定位时,可采取多次网格式飞行,未知节点检测每次飞行时获得的图2的峰值,当峰值低于一定门限值时,舍弃对此数据的处理。而只采用距离d较小时获得的频率差分信息作为定位需要的相关信息,这样可以提取误差小的相关信息,排除误差大的相关信息,进而提高定位的准确度。
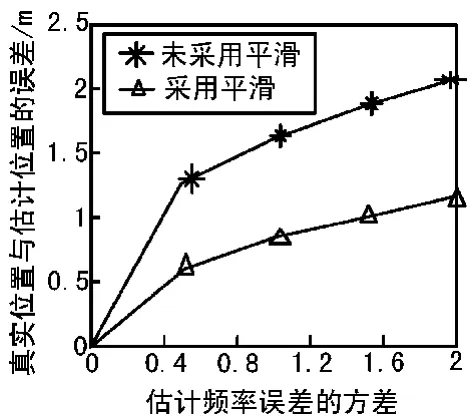
图6 采用平滑和非平滑的方法时定位误差的对比
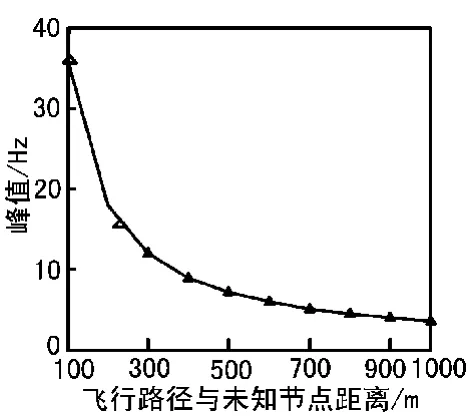
图7 峰值和飞行路径与未知节点间距离的关系
6 结束语
本文提出了一种射频干涉与测量多普勒频偏相结合的节点定位方法,该定位方法仅需利用节点的常规无线通信设备,测量信号可由射频芯片的RSSI硬件电路提供,不需要额外的辅助测量装备。文中的定位方法利用RSSI信号的频率变化进行定位,克服了以往常用的利用RSSI信号强度进行定位的方法定位精度较差的缺点。在定位过程中,节点进行位置估计不需要相邻节点辅助或集中数据处理,每个节点即可单独计算出各自的位置;同时,巧妙地利用了差分方法来消除频偏,避免复杂的估计频偏算法,算法更简单,更加适合大规模和远距离定位。因此,所提出的方法是一种适用于无线传感器网络的分布式定位方法。
[1]BULUSU N,HEIDEMANN J,ESTRIN D.GPS-less Lowcost Outdoor Localization for Very Small Devices [J].IEEE Personal Communications,2000,7(5):28-34.
[2]NICULESCU D,NATH B.Ad hoc Positioning System[C]∥Conference Record of IEEE Global Telecommunications Conference,San Antonio,GLOBECOM,2001,5:58-62.
[3]HE Tian,HUANG Cheng-du,BLUM B M,et al.Rangefree Localization Schemes in Large Scale Sensor Networks[C]∥Proceedings of the 9th Annual International Conference on Mobile Computing and Networking,MOBICOM,2003:102-106.
[4]BAHL P,PADMANABHAN VN.An in-building RF-based User Location and Tracking System[C]∥Proc.of the IEEE INFOCOM,2000,2:88.
[5]HARTER A,HOPPER A,STEGGLES P,et al.The Anatomy of a Context Aware Application[C]∥Proc.of the 5th Annual ACM/IEEE Int'l Conf,2002,1:212-217.
[6]URRUELA A,PAGES-ZAMORA A,RIBA J.Divide-and-Conquer Based Closed-form Position Estimation for AOA and TDOA Measurements[C]∥IEEE International Conference on Acoustics,Speech and Signal Processing,2006,IV:72-77.
[7]GIROD L,ESTRIN D.Robust Range Estimation Using Acoustic and Multimodalsensing[C]∥ IEEE Robotics and Automation Society,2001:117-124.
[8]张渭乐,殷勤业,韩玮,等.基于Doppler效应的无线传感器网络射频干涉定位方法[J].中国科学F辑:信息科学,2009,39(8):909-917.
[9]MAROTI M,KUSY B,BALOGH G,et al.Radio Interferometric Geolocation[C]∥The 3rd International Conference on Embedded Networked Sensor Systems,San Diego,USA,2005:1-12.
猜你喜欢
数学杂志(2022年5期)2022-12-02
汽车工程师(2021年12期)2022-01-17
新世纪智能(数学备考)(2021年5期)2021-07-28
军民两用技术与产品(2021年12期)2021-03-09
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
知识经济·中国直销(2018年3期)2018-04-12
电子制作(2016年1期)2016-11-07
腹腔镜外科杂志(2016年9期)2016-06-01
学习月刊(2015年1期)2015-07-11