
矩阵变换器—永磁同步电机无传感器控制系统的研究
2012-10-09 03:54潘宝安
制造业自动化 2012年9期
潘宝安
PAN Bao-an
(临沂职业学院, 临沂 276000 )
0 引言
矩阵变换器是一种新型交-交电力变换器,与传统的交-直-交变频器相比,具有很多优点,例如矩阵变换器输入功率因数可调,能量可双向流动,无直流环节储能元件,输入输出波形良好。如今,针对矩阵变换器进行了很多研究,如用于变频调速系统[1],风力发电系统[2],航空宇航系统[3],车辆牵引系统[4]等。其中变频调速系统是研究的热点,目前已经有基于矩阵变换器的磁场定向控制[5]和直接转矩控制[6]方面的研究。
1 间接式矩阵变换器
矩阵变换器可分为直接式矩阵变换器和间接式矩阵变换器。间接式矩阵变换器的结构如图1所示。

图1 间接式矩阵变换器的结构
类似于传统交-直-交变频器,间接式矩阵变换器包含整流侧和逆变侧,因此可分别对整流侧和逆变侧进行调制。但间接式矩阵变换器无中间直流环节储能元件。
1.1 整流侧的PWM调制
如图2所示,将三相输入电压划分为6个扇区,在每个扇区中,总有一相电压绝对值最大,另外两相电压与之反相。这样划分的目的是为了获取最大的直流电压。例如在第1扇区,ua为正,且绝对值最大,ub,uc为负。此时占空比计算为

θa,θb,θc输入相电压的相角。其他五个扇区与第1扇区的计算方法相同。

图2 输入电压扇区划分
1.2 逆变侧的SVPWM调制
如图3所示,根据逆变侧开关状态的不同,将输出电压也划分为六个扇区。1代表上桥臂导通,下桥臂关断,0则相反。因此,共包含6个有效矢量(U1~ U6)和2个零矢量(U0和U7)。当期望输出
Uref 时


图3 输出电压扇区
Un和Um为Uref所在扇区内的两个相邻矢量,U0为零矢量 (000或111). 占空比计算为

mV为逆变侧调制系数,0 ≤ mV≤1。
2 矩阵变换器—永磁同步电机控制系统
永磁同步电机具有较高的功率密度,较高的效率,快速动态响应,且转速与频率严格呈正比,因此常用于需要较高精度的伺服系统中。
在永磁同步电机的控制系统中,矢量控制可获得快速的速度响应和较好的转矩性能[7],因此本文采用矢量控制。上一部分矩阵变换器的逆变侧的SVPWM调制即针对于永磁同步电机的矢量控制。
矢量控制系统如图4所示,其中的速度估算将在下一部分进行介绍。首先,三相定子电流被变换为dq旋转坐标系下的解耦量,包括磁通分量(id)和转矩分量(iq)。系统中包含三个PI控制器,其中一个外环控制器用于调节转速,另外两个内环控制器用于分别调节id和iq。系统采用id=0控制方式,这旨在获得最大转矩控制。

图4 矩阵变换器—永磁同步电机矢量控制系统
3 无传感器控制系统
为了获得闭环控制和磁场定向,需要检测电机的转速[8]。然而,速度传感器的引入增大了系统的体积,提高了成本,并且限制了在恶劣环境中的应用。由永磁同步电机本身的模型,可以通过检测电机的电压和电流推算出转速,而不使用传感器,这就是无传感器技术。估算转速的方法有很多,本文采用模型参考自适应系统。
模型参考自适应系统就是将不含估算参数的方程作为参考模型,将含有待估参数的方程作为可调模型,通过比较两个模型,当其差值为零时,即认为可调模型中的待估参数为实际值。
在旋转dq坐标系中,永磁同步电机的数学方程为

将定子电流作为变量

u 'q=uq,由(5)得

其中

式(6)包含转子速度信息,将其作为参考模型。ωr为待估参数,令估算值,则
式(6)变为

如果式(7)与实际值相同,则式(7)即为电机的精确模型。通过PI调节,估算转速可表示为
其中


通过PI调节,误差信号εω产生估算转速 ωr
^。迫使估算的定子电流 i 's^逼近实际定子电流i's,ω^即此时估算转速逼近实际转速。基于模型参考
r自适应系统的转速估算如图5所示。转子位置可由估算转速积分求得。

4 仿真分析
设仿真参数如下所示:
三相输入: 220V, 50Hz
定子电阻: 0.9585Ω
定子电感:Ld=Lq=5.25mH
永磁体磁通: 0.1827Wb
转动惯量: 0.0006329 kg●m2
摩擦因数: 0.0003035 N m s
极对数: 4
1)系统仿真结果
设开始时给定转速为200rpm,0.2s时突变为300rpm,负载转矩为1 N.m,仿真波形如图6所示。

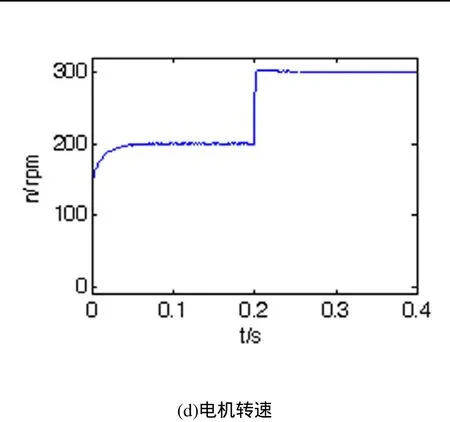
图6 转速突变时的仿真波形
图6表明间接式矩阵变换器—永磁同步电机系统可以很好地跟踪指令转速的变化。
2)无传感器控制系统的仿真
设开始时给定转速为200rpm,0.2s时突变为300rpm,负载转矩为1 N.m,仿真波形如图7所示。

图7 无传感器控制系统的仿真
图7表明设计的无传感器控制系统可以很好地进行转速估算,并可用估算的转速代替实际的转速,实现了无传感器控制,降低了成本,缩小了体积,提高了可靠性。
5 结论
通过仿真结果可得,矩阵变换器是一种优越的电力变换器,可用作永磁同步电机的供电电源,具有良好的指令转速跟踪性能。提出的无传感器控制技术可应用于此系统,实现了转速估算和无传感器控制,降低了成本,缩小了体积,提高了系统可靠性。
[1] Klumpner C,Nielsen P,Boldea I and Blaabjerg F,“A new matrix converter motor (MCM) for industry applications,”IEEE Transactions on Industrial Electronics,2002,49(2):325-335.
[2] Yang Jun-Hua,Zheng Jian-Hua,Feng Huan-Xia,Wu Jie and He Rui-Wen,“Doubly-fed variable-speed wind generation system using matrix converter,” High Voltage Engineering,2009,35(11):2820-2825.
[3] Trentin Andrew, Zanchetta Pericle, Wheeler Pat and Clare Jon,“Performance assessment of matrix converter and two stage matrix converter for EMA in aircraft application,”IEEE Annual Power Electronics Specialists Conference,2007:2692-2697.
[4] Julian A L and Oriti G, “A DC traction drive application of a regenerative rectifier using AC/AC matrix converter theory,” Proceedings IEEE IAS’03, 2003:198-204.
[5] Hong-Hee Lee, Nguyen Hoang M and Chun Tae-Won,“A study on rotor FOC method using matrix converter fed induction motor with common-mode voltage reduction,”7th Internatonal Conference on Power Electronics,ICPE'07,2008:159-163.
[6] Joshi, R.R, Gupta R.A and Wadhawani A.K, “Intelligent controller for DTC controlled matrix converter cage drive system,” Iranian Journal of Electrical and Computer Engineering,2008,7(1):9-16.
[7] Espina Jordi, Arias Antoni, Balcells Josep and Ortega Carlos,“Speed anti-windup PI strategies review for fi eld oriented control of permanent magnet synchronous machines,”CPE 2009-6th International Conference-Workshop-Compatability and Power Electronics,2009:279-285.
[8] Morimoto Shigeo,Kawamoto Keisuke,Sanada Masayuki and Takeda Yoji,“Sensorless control strategy for salient-pole PMSM based on extended EMF in rotating reference frame,” IEEE Transactions on Industry Applications,2002,38(4):1054-1061.
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
