
差分GPS系统有什么作用?(上)
2012-10-08 12:14刘天雄
卫星与网络 2012年11期
+ 刘天雄
一 背景
不同的导航和定位应用对定位精度的要求是完全不同的。对于开阔空间的导航,如开阔海域的水面舰艇以及商用货轮的导航,以及从航线、航路到非精密进近阶段的飞机导航,数十米的水平精度就已经足够了。但是,许多重要的应用对定位精度有更高的要求。在能见度很差的情况下,船舶进出港口和机场地面车辆道路引导要求达到米级的水平定位精度,飞机精密进近要求米级的垂直定位精度。国际民航组织在其《航空GNSS完好性监测系统》(ICAO GNSS SARPs)草案第七版规定,民航客机利用GPS定位数据实现初始进近(非精密进近)时,GPS水平定位精度应不劣于220m,对垂直定位精度没有要求;I类精密进近时,GPS水平定位精度应不劣于16m,垂直定位精度应不劣于7.7m;而民航客机盲降(CAT III)时,要求GPS水平定位精度不劣于6m,垂直定位精度应不劣于2m。

还有一些特殊行业应用需要更高的定位精度,例如,水库或水电站的大坝由于水负荷的重压而产生变形,危及坝体的安全,需要对大坝外观变形进行连续而精密的监测,监测精度要求为亚毫米级。滑坡是指在一定环境中斜坡岩土在重力作用下,由于内外因素的影响,使其沿着坡体内一个或几个软弱面(带)发生剪切下滑现象。对水库、山区高速公路、铁路等附近区域滑坡体的三维变形实时监测,规避山体滑坡造成的民众人身安全风险十分必要,监测精度要求为毫米级。如此高的定位精度要求仅仅单独靠GPS系统是无法实现的。
大地测量、航空和航海等GPS系统高端用户对定位精度和导航信号完好性要求如图1所示。
如何进一步提高GPS导航和定位的精度呢?要解决这个问题,就要先了解差分GPS。
二 差分GPS
差分GPS系统是一个全天候的GPS全球定位系统的增强系统,它可以大幅度提高GPS的定位精度,从GPS标准定位服务的15m提高到10cm(水平)。GPS系统标准定位服务(SPS)接收机提供了两种不同的测量值,L1频率C/A码伪距测量值以及L1载波相位测量值,这些测量值会受到一些误差因素的影响,上一讲谈到卫星星历误差、卫星原子钟误差、大气层中的对流层和电离层折射误差以及信号多径效应是GPS信号固有的,同时GPS接收机自身也有一系列问题,包括接收机时钟误差和接收机噪声。误差源给相距不远的用户所造成的误差都是类似的,且随时间缓慢变化。也就是说,误差在空间和时间上都是相关的。如果接收机的位置已知,那么就可以估算测量误差,这样的估算误差习惯上称为差分修正。如果该接收机附近的GPS用户接收到差分修正信息,就可以用来减少定位解算误差,这种方式通常简写为DGPS,所有的DGPS系统都使用这些误差的相关性来改善系统的定位精度。
其实差分GPS的道理并不复杂。开车的时候,如果往右偏了,那么谁都知道稍稍向左调整一些。DGPS也是同样的道理。首先确定一些已知点的信息,如果已知点和被测点距离足够近,那么可以认为它们受到的各种误差因素影响基本是相似的。这样,计算过程中将它作为参照,来确定应该将GPS计算的结果“左调”还是“右调”一些,从而得出更精确的定位结果。
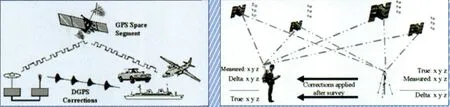
图2 差分GPS(DGPS)系统组成
DGPS意味着我们可以从至少两个相隔某一固定距离(又称为基线)的GPS接收机中获得相似的测量值集合,将两个接收机得到的相似测量值进行线性差分,就可以消除两个接收机共有误差。差分GPS系统组成如图2所示,包括能够接收差分修正信号的GPS用户接收机,一座位置已知的GPS基准站(通常又称为差分台),基准站接收GPS信号并确定位置坐标,由于基准站的位置是事先精密确定的,通过比较和实际位置(真值)之间的偏差可以计算出上述GPS信号包含的误差,由此可以计算出GPS的定位修正因子,然后再由基准站利用数据链(无线电广播)将差分修正等信息播发给附近的GPS用户。
基准站通过一条数据链路为终端用户提供信息,信息包括:①终端用户原始伪距测量值的校正值,GPS卫星提供的时钟和星历数据的校正值,或用来取代广播时钟和星历信息的数据;②基准站原始测量值(例如伪距和载波相位);③完好性数据(可见卫星的“可用”或“不可用”指示,或提供校正值精度的统计值);④辅助数据,包括基准站的位置、健康状况和气象数据。
DGPS系统可以按照服务的地理区域来分类,最简单的DGPS系统设计为只在很小的一个地理区域(即用户与基准站的距离在10~100km)内起作用。为了覆盖更大的地理区域,通常还需要采用多基站以及不同的算法。区域系统一般的覆盖范围最大到1000km,而广域系统的覆盖范围更大。对于一个基准站而言,其有效作用范围(或称覆盖范围),将主要由DGPS系统定位精度要求和数据传输系统的性能决定。
根据基准站发送的差分GPS修正信息,将DGPS分为位置差分、伪距差分和相位差分三类,这三类差分方式的工作原理是相同的,即都是由基准站发送修正信息,由用户站接收并对于其测量结果进行改正,以获得精确的定位结果。有所差别的是,发送改正数的具体内容不一样,其差分定位效果也有所不同。差分定位可以提高精度的原因在于它可以消除基准站与用户之间的公共误差,但随着用户距基准站的距离的增加、对流层和电离层误差公共性逐渐减弱,定位精度降低。基准站和用户之间的距离对用户定位精度有着决定性的影响。
1 位置差分
从概念上讲,实现DGPS最简单的办法是把GPS基准接收机放置在测绘过的基准站上,基准站的GPS接收机接收到四颗卫星后即可解算出基准站的坐标。由于存在着星历误差、卫星钟漂移、SA误差、对流层及对流层延迟、多径效应以及其他测量误差,解算出的坐标与基准站的已知实际坐标是不一样的。GPS测量值和真值之间存在误差(经度、纬度和测地高度坐标差),基准站利用数据链将误差修正信息发送出去。用户接收到差分修正信息后,得到的修正的用户坐标已消去了基准站和用户之间的共有误差,特别是星历误差、卫星钟漂移、SA误差。

图9 Galileo卫星导航系统全球对流层ERA15模型均方根值(RMS)误差图
但是,这种差分方法存在严重不足,要求所有接收机对同样一组卫星进行伪距测量,要求具有同样的精度几何因子(GDOP)项,才能达到所受的偏差影响是相同的要求。因此,用户接收机必须与基准站协调卫星选择,或者基准站必须测定并发送对所有可见卫星组合而言的位置校正值,显然这种方法对用户来说不方便,对基准站来说也不经济。实际上,不同位置上的用户接收机和远端基准站的接收机很难保证定位解算过程中的几何精度因子(GDOP)是相同的。位置差分法适用于用户与基准站间间隔在100km以内的区域。
2 伪距差分
伪距差分是目前应用最广的一种GPS差分技术。首先测量基准站与可见卫星之间的距离,与含有星历误差、卫星钟漂移、SA误差、对流层及对流层延迟等测量误差的测量伪距加以比较;然后基准站将所有卫星的伪距测量偏差广播给用户,用户利用此测距误差来修正测量的伪距;最后用户利用改正后的伪距来解出本身的位置,由此消去公共误差,提高定位精度。
与位置差分类似,伪距差分能消除用户和基准站之间的公共误差,但随着用户到基准站之间距离的增长又出现了系统误差,这类误差用任何差分法都是不能消除的。用户和基准站之间的距离对于精度有决定性影响。
3 载波相位差分

图3 RTK GPS定位技术
由于GPS卫星星座的不断运动,一般要求GPS接收机能够解算出载波L1频点上变化的多普勒频移。在使用双频接收机的场合,要同时跟踪L1和L2两个频率。频移是由于卫星和接收机之间的相对运动引起的。利用对多普勒频移的积分能极精确地测量出各个历元之间信号载波相位的前进测量值。干涉测量技术利用这些精确的相位测量值,在假定误差能得以减轻的情况下,可能获得厘米级的实时位置精度。虽然在历元之间信号相位的变化能极精确地测量出来,但从卫星到接收机传播路径上的载波整周期数仍是模糊的。确定传播路径上的载波整周期数叫做“载波整周模糊度解算”,它是动态DGPS研究范畴中一个活跃的研究领域。
利用载波相位相对定位的技术就是实时动态(RTK)测量技术,RTK利用两部或多部GPS接收机同时跟踪同样的多颗GPS卫星。基准站位于位置已知的固定点上,将位置和测量信息利用无线电链路发送给移动的用户,用户接收机内置的软件合成并处理来自基准站信号和来自GPS卫星的信号,最终实现位置解算,如图3所示。目前,初始的载波整周模糊度基本可以用OTF技术实时解模糊。这种方法适用于如下三种情况,①用户与基准站的距离为10~15km;②用户需要实时解算出三维位置坐标;③信号传播路径相对无障碍。
必须设法克服RTK GPS测量技术作用范围有限(10~15km)的缺点,否则移动用户和基准站之间的公共误差将变得不太有相互关系了。DGPS技术在RTK定位技术基础上,由用户接收GPS卫星信号的载波相位与来自基准站的载波相位(由基准站通过数据链实时将其载波观测量及站坐标信息一同传送给用户),并组成相位差分观测值进行实时处理,就能够解算出用户的三维坐标,定位精度可以达到厘米级。
三 局域差分GPS(LADGPS)
局域差分GPS系统(LADGPS)的工作原理建立在基准站和用户的误差与同一时空相关基础上,基准站和用户对GPS卫星同步同轨跟踪,通过伪距差分技术,当基准站和用户之间的距离间隔小于150km时,用户定位精度一般优于5m。当基准站和用户之间的距离增大,特别是间隔大于300km时,基准站和用户之间定位误差的相关性就会减弱,用户定位精度就会迅速降低。
LADGPS系统包括基准站、数据通信链和用户三部分,如图4所示。LADGPS系统基准站需要有厘米级精度的三维地心坐标,基准站周围在全视野内至少应有高度角5°以上的净空间,基准站配置的GPS接收机应能提供伪距和相位信息,以及与之匹配的自动气象记录仪。用户GPS接收机应具备接收差分信号和解调解码功能。

图4 LADGPS系统组成及信息流
在大多数运行的LADGPS系统中,基准站不测定位置坐标误差,而是测定并广播每颗可见卫星的伪距校正值。在LADGPS方案中,参考站的蝶形天线设置在经准确测量的位置上,用球形天线发射或接收差分修正信息,LADGPS无线链路所用频段为100kHz~1.5GHz。LADGPS定位精度取决于用户与参考站的距离,以及无线电链路发射差分修正信息的延迟量。LADGPS系统主要应用于城市或近海域建立一个或多个基准站和播发站的LADGPS网,提供较高精度的实时导航和定位服务。
1 美国国家差分GPS系统-NDGPS
20世纪80年代后期,为满足美国对海事导航的定位精度需求,美国海岸警卫队研发了海事GPS差分系统-MDGPS,从1989年开始陆续改造MDGPS系统的无线电信标,广播RTCM SC-104电文格式的GPS差分修正信息,称为海事DGPS,覆盖美国沿海区域、大湖地区、美国大陆的内河水路、夏威夷、阿拉斯加以及波多黎等地区。1999年3月投入运营以来,即使在GPS实施选择可用性SA期间,海事DGPS能为离参考站100km的用户提供1~5m的水平定位精度。
海事DGPS的成功服务推动了美国国家差分GPS系统(NDGPS)的研发。NDGPS是美国地基GPS增强系统,为美国大陆和水路用户提供高精度定位服务,同时提高了GPS系统的完好性。NDGPS由美国海岸警卫队USCG运行控制的MDGPS和美国交通运输部运行控制的美国DGPS系统组成。同时NDGPS将原美国空军地波急救网络(GWEN)站变换为GPS参考站,分布在整个美国大陆,这些参考站的发射差分修正信息的广播天线安装在100m高的塔上,无线电信号作用距离为400km,大部分地区达到双重覆盖,如图5所示,为美国铁路、农业、林业、环境和急救响应服务等领域提供高质量的定位、导航和授时服务。

图5 美国国家差分GPS系统-NDGPS服务覆盖范围

图6 NDGPS的工作原理

图7 GPS、NDGPS和HA-NDGPS的定位精度
美国国家DGPS系统-NDGPS已成为国际标准,世界上50多个国家已经简称了相似的GPS增强系统。NDGPS的工作原理如图6所示。NDGPS已启动现代化工作,包括高精度NDGPS系统(HA-NDGPS)。目前HA-NDGPS正在全面建设过程中,在服务覆盖范围区域内提高GPS的完好性指标,同时提供10~15cm定位精度,GPS标准定位服务的精度为10~16m,NDGPS的定位精度为1~3m,定位精度的比较如图7所示。
2 美国FAA局域增强系统-LAAS
针对GPS信号缺乏实时、快速的健康监控问题,即所谓系统完好性告警时间问题,以及如何进一步提高定位精度以引导飞机精密进近问题,例如卫星钟漂移以及电离层延迟会引入几米的定位误差,这些误差在飞机进场和着陆过程中必须实时修正。美国联邦航空管理局(FAA)研发了局域增强系统(LAAS),LAAS系统是基于实时差分修正GPS信号的全天候飞机着陆系统。
位于机场附近的局域参考站(基准站)具有精密测绘的三维地心坐标,参考站接收机接收GPS信号解算出三维位置坐标,然后实时将解算数据送给机场LAAS系统数据处理中心,中心计算得到各处参考站的GPS信号差分修正信息后利用VHF频率数据链路将差分电文播发给用户。飞机上的接收机利用差分信息修正GPS信号,可以在能见度较低的情况下,引导飞机精密进和着陆,工作原理如图8所示。国际民航组织称这种类型的GPS差分系统为GPS地基增强系统(GBAS)。
LAAS系统的上行数据链路的VHF频率范围为108MHz~118MHz,与仪表着陆系统(ILS)以及甚高频全向(无线电)信标导航辅助系统(VOR)共有这一甚高频频段。LAAS系统采用时分多址技术(TDMA)在VHF频率上为整个机场提供GPS差分服务。
目前,LAAS系统可以达到Category I仪表着陆系统定位精度,即水平16m、垂直4~6m。LAAS系统的发展目标是实现CAT III仪表着陆系统定位精度(水平6m、垂直2m),即民航客机盲降的定位精度要求。LAAS系统大幅度地提高了用户的定位精度,同时有效地改善了GPS系统完好性,因此为用户提供了WAAS所不能达到的优质定位服务。不足之处是,向其他所有基于射频信号的着陆系统一样,LAAS系统VHF频率数据链路容易受到无意信号干扰,同时多径效应也将恶化定位精度。

图4 LADGPS系统组成及信息流
猜你喜欢
地理空间信息(2022年10期)2022-10-31
现代测绘(2022年3期)2022-07-23
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
制造技术与机床(2018年10期)2018-10-13
雷达学报(2017年1期)2017-05-17
测绘通报(2016年12期)2017-01-06
电子制作(2016年1期)2016-11-07
