
三维伪装背景颜色特征提取方法的研究
2012-09-27 01:41许卫东周国强
电子设计工程 2012年4期
赵 园,许卫东,徐 鑫,周国强
(解放军理工大学 工程兵工程学院,江苏 南京 210007)
三维伪装背景颜色特征提取方法的研究
赵 园,许卫东,徐 鑫,周国强
(解放军理工大学 工程兵工程学院,江苏 南京 210007)
针对伪装背景勘察中快速精确地获得客观的三维背景特性的要求,采用了快速获得伪装背景三维点云数据的扫描方法,通过对点云数据预处理(数据拼接、颜色聚类),并对背景三维信息进行基于曲面面积的数据分析得到反映客观的三维数据颜色直方图,据此设计出获得符合背景的迷彩图案,结合某军事伪装试验场进行三维伪装背景颜色特征提取研究,实验证明本研究方案为伪装迷彩图案设计提供了客观可靠的数据支持。
伪装背景;三维激光扫描技术;颜色特征提取
伪装背景勘察是进行工程伪装的基础性工作,其为工程伪装的设计、实施及效果检测提供数据支撑[1]。随着伪装技术的发展,目前伪装背景勘察多采用地面成像手段实现,以快速地获得地面背景的伪装特性,刘保荣、许卫东等研制的工程伪装空中勘察及性能检测系统[2],较好地解决了广泛开展对抗空中侦察的难题。但是对于以数码相机为基础的光学成像系统,普遍存在图像边缘区域产生明显畸变,同时基于平面成像系统所得图像数据很难反映客观三维空间中的颜色、纹理的立体关系,在一定程度上制约了军事伪装的发展。三维激光扫描技术可以快速精确地获得客观的三维背景数据,进而获得背景地物的三维光学伪装特性成为现实可能。通过对扫描策略的研究,文中提出了一种快速获得点云数据的方法,通过对所得点云数据进行研究,确定适用于军事伪装的背景颜色特征直方图,为下一步的工程伪装设计及效果检测提供数据支撑。
1 三维伪装背景数据的获取
三维激光扫描技术集成了多种高新技术,采用非接触式高速激光测量方式,以点云数据形式表达地形地貌三维表面特征,可以快速获取与处理战场三维地形信息。其主要包括激光测距系统和激光扫描系统,同时集成了CCD数字摄影及仪器内部校正系统。激光测距系统主要采用脉冲法测距。通过数据采集获得测距观测值L,精密时钟控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值θ。由此可得到三维激光脚点坐标的计算公式:
CCD相机对所扫描区域进行摄影,并通过仪器内部的矫正系统与扫描所得区域数据进行相互匹配,得到目标各点的颜色坐标RGB值。
2 点云数据预处理
通过三维激光扫描系统获得的点云数据具有精度高、客观反映立体空间关系等优点,但是同时也存在着数据庞大无序,不同扫描站所得图像信息分别独立等问题。因此,为获得整体伪装背景的光学特性需要进行预处理。
2.1 点云数据拼接
点云数据拼接技术主要是将各站点中的坐标系统(X1Y1Z1、X2Y2Z2、…、XnYnZn)统一到同一坐标系中。
目前点云拼接主要使用4种方法,根据实际需要及运算速度的考虑,盛业华、张卡等提出的方法[4]具有很大的借鉴意义。结合伪装背景勘察实际,在其基础上利用球形靶标及其激光反射强度信息确定“同名标志点”以实现点云数据的拼接误差最小化。主要流程为:根据扫描站的顺序,使用相邻扫描站扫描重叠区内的靶标,依次求取各站的坐标转换参数,再对序列坐标转换参数按闭合条件进行加权误差分配,由此得到各扫描站的最终坐标转换模型,并依此坐标转换模型对各站扫描点云进行坐标变换,将它们统一到目标坐标系下。坐标转换通用公式为:

以某军事伪装试验场为例,通过伪装背景勘察方案获得其中每个站点的点云数据(如图1、图2所示),根据数据拼接方法进行计算,以获得最小误差,拼接结果如图3所示。经过计算则由拼接处理产生的误差为0.007 6 m.该精度与扫描仪自身测量精度0.005 m相近,拼接处理后不会明显降低原始扫描数据的精度。
图1 三维伪装背景1(拼接前)Fig.1 3D camouflage background 1(before mosaics)
图2 三维伪装背景2(拼接前)Fig.2 3D camouflage background 2(before mosaics)
2.2 三维伪装背景点云数据预处理的颜色聚类方法
点云数据的无序、多样性决定了在进行颜色特性提取之前需要对点云数据中的颜色进行初步聚类,压缩数据量并获得能够足够表现背景特性聚类中心是点云数据预处理的基本原则。针对基于中心颜色聚类方法可以利用爬山算法[5]的进行聚类分析,文献[6]提出一种基于金字塔结构与减法聚类的HCM彩色图像聚类算法(PSHCM)。但是由于算法对于初始聚类中心种类c的规定,对于庞大的点云数据,需要进行多次对c进行计算,从而达到“足够表现背景特性”的要求。基于中心密度的动态聚类中心改进的HCM彩色聚类算法,能够解决不同数据量需要进行设置c值的问题。仿真实验证明,此算法完全可以达到预处理的要求。
2.2.1 伪装背景点云数据颜色聚类阈值设定
由于sRGB颜色空间不是均匀的视觉空间,不利于颜色之间基于欧式距离下的相互计算,而作为均匀颜色空间的L*a*b*颜色空间中两点间的差别与人眼的感觉一致,故先将图像从sRGB空间转化到L*a*b*空间。在L*a*b*颜色空间下的欧式距离与人眼视觉差异相同,因此,将L*a*b*颜色空间色差距离定义为式4,同时根据人眼对于L*a*b*颜色空间下的欧式距离的实验证明:聚类后,颜色值与聚类前颜色值色差不大于3NBS,即聚类精度阈值ε0≤3时,人眼几乎分辨不出颜色差别。

2.2.2 改进的基于中心密度的动态聚类中心算法
在中心密度法确定初始聚类中心的基础上,结合动态聚类的概念,提出计算动态聚类中心的方法,以满足在不同的背景、不同精度要求下颜色种类差异化产生的聚类中心的差异化问题。其基本流程如下:
1)使用中心密度法确定初始聚类中心Zj;
2)对样本空间进行一次HCM聚类并输出第一次的修正聚类中心;
利用改进的基于中心密度的动态聚类中心算法将2.1中完成数据拼接后的三维图像进行颜色,聚类初始图像及聚类后三维图像分别如图3、图4所示。经过基于彩色共生矩阵的相似度算法[7]计算,相似度S达到0.984,从计算角度证明本算法的可行性。

图3 三维伪装背景(拼接后)Fig.3 3D camouflage background (after mosaics)
3 伪装背景颜色特征提取

图4 聚类后三维图像Fig.4 3D image clustered
不同于平面图像的数据直方图分析方法,三维伪装背景颜色特征的提取要求对背景三维信息进行基于曲面面积的数据分析提取。为此,基于微积分原理,对聚类后的背景信息进行微积分处理。具体做法为,利用微分方程,以点云数据中每一点作为中心,计算该点所在区域内的曲面面积Si,建立m×n×j维矩阵,矩阵内存放每一点的面积Si,以聚类后每种颜色出现的次数分别作为该颜色量化的计数器,进行累加得基于三维数据的颜色直方图量化结果如图5所示。
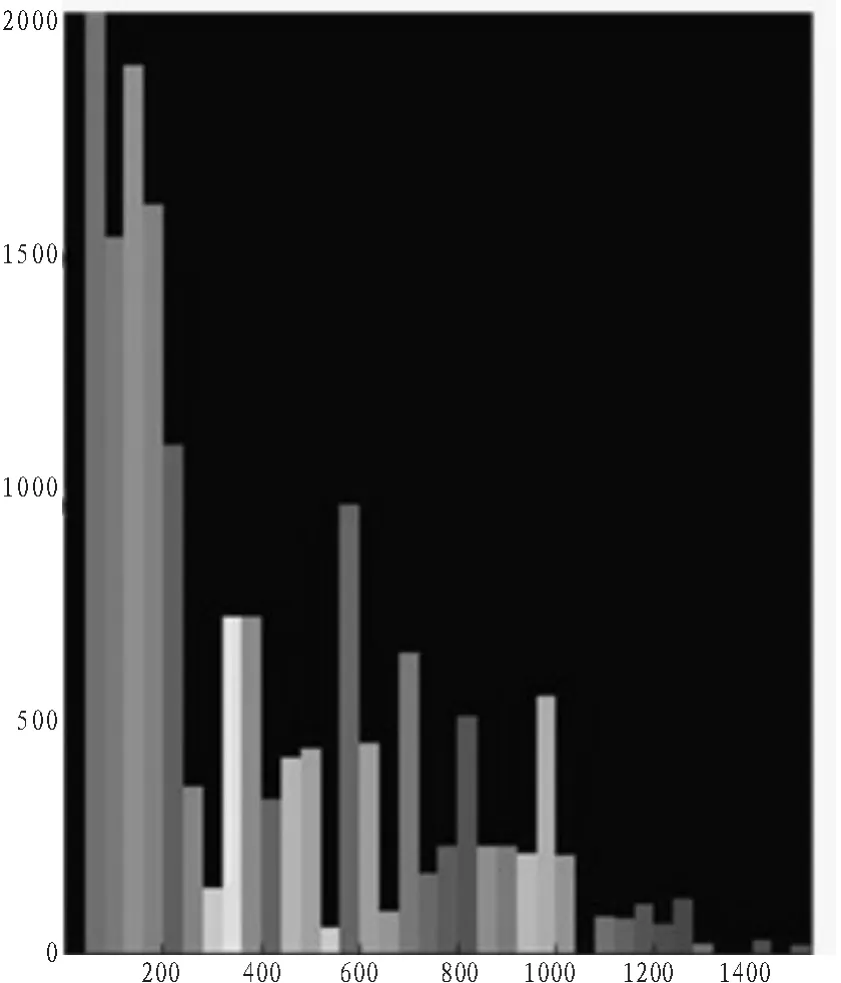
图5 三维数据颜色直方图Fig.5 Color histogram based 3D data
4 实验结果分析及应用
通过三维数据颜色直方图可以得到如下结论:
1)此背景中与中绿色L*a*b*(CIE1976空间坐标为37.6,-6.8,9.0)相近绿色色系的所占曲面面积高达到65.36%,说明在此区域存在大量绿草地,这与实地观察的结果一致,实际上本实验正是选取夏季以草地为主的山地为背景。
2)背景数据中亮色色系(以CIE1976L*a*b*空间坐标为93.1,-0.1,1.3为主)所占曲面面积比也比较多,达到19.74%,这与背景中存在一条水泥马路,以及裸露的岩石有关,同样与实地背景调查相一致。
3)除去绿色及亮色的颜色主要有两类颜色,其一是暗色系(以 CIE1976L*a*b*空间坐标为 31.9,-4.9,7.0 为主),主要是背景阴影及其他深色区域产生;另一类为所占面积极小的其他颜色组成,主要是由于在颜色空间转换及聚类、测量中产生的色差引起,可以忽略。
针对实验研究背景,以上分系所得颜色为迷彩图案基本主色,以三维数据的颜色直方图中所占比例大于5%的颜色作为辅助色,利用数码迷彩图案生成系统设计出符合本研究背景的迷彩图案,样图如图6所示。
图6 数字迷彩图案Fig.6 Digital camouflage pattern
5 结束语
作为工程伪装的基础性工作的背景勘察技术决定着伪装工程质量,本文通过三维激光扫描技术及数据的研究,实现了伪装背景的三维数据分析,并通过实验分析设计出符合伪装背景的数字迷彩图案。但是由于作者水平有限,在三维伪装背景的研究还有待进一步提高,希望通过借助本文起到抛砖引玉的效果。
[1]李汉斌,黄拥元.伪装技术[M].北京:解放军出版社,2001.
[2]刘保荣,许卫东.工程伪装空中勘察及性能检测系统研制[J].防护工程,2008,30(2):68-71.
LIU Bao-rong,XU Wei-dong.The development of aero reconnaissance&characteristic testing system for engineering camouflage[J].Protective Engineering,2008,30(2):68-71.
[3]许卫东,赵园.基于激光扫描技术的防护工程伪装背景勘察方案研究[C]//秦有权等编著.中国土木工程年会野战防护专业委员会第一次年会论文集,河南洛阳,2011:108-113.
[4]盛业华,张卡,张凯,等.地面三维激光扫描点云的多站数据无缝拼接[J].中国矿业大学学报,2010,39(2):233-237.
SHENG Ye-hua,ZHANG Ka,ZHANG Kai,et al.Seamless multi station merging of terrestrial laser scanned 3D point clouds[J].Journal of China University of Mining&Technology,2010,39(2):233-237.
[5]Cheng H D,Jiang X H,Sun Y.Color image segmentation:advance and prospects[J].Pattem Recognition,2001,34(12):2259-2281.
[6]蔡云骧,秦建飞,孟宪浩,等.一种改进的快速HCM颜色聚类算法[J].光电技术应用,2009, 24(1):73-77.
CAIYun-xiang,QIN Jian-fei,MENG Xian-hao,etal.A modified fast HCM algorithm for color clustering[J].Electrooptic Technology Application,2009, 24(1):73-77.
[7]吴超,吕绪良.基于彩色共生矩阵的相似度算法及其伪装效果评价应用[J].防护工程, 2011,33(3):41-45.
WU Chao,LV Xu-liang.A similarity algorithm based on color level co-occurrence matrix and its application in camouflage evaluation[J].Protective Engineering,2011,33(3):41-45.
Study of the color feature extraction method in 3D camouflage background
ZHAO Yuan, XU Wei-dong, XU Xin, ZHOU Guo-qiang
(Engineerings Institute of Engineering Corps,PLA University of Science and Tecnology,Nanjing210007,China)
According to the requirement that to get the objective 3D characteristics quickly and accurately in camouflage background investigation, used the new scanning method to get camouflage background 3D point cloud data fast, pretreat with the point cloud data (data matching and color clustering), and analysis the background information for 3D based on the curved surface area, then get the 3D data color histogram objective, and a camouflage pattern designed for the background,combined with a military camouflage experimental base for the study of the color feature extraction method in 3D camouflage background,the experiment proved that this study plan for camouflage pattern design provides objective and reliable data to support.
camouflage background; 3D laser scanning technology;color feature extraction
E951.4
A
1674-6236(2012)04-0019-03
2011-12-24 稿件编号:201112082
赵 园(1985—),男,河北张家口人,硕士研究生。研究方向:军事工程伪装与材料。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
铁道通信信号(2019年6期)2019-10-08
摄影之友(影像视觉)(2018年12期)2019-01-28
雷达学报(2017年6期)2017-03-26
初中生世界·八年级(2017年3期)2017-03-24
贵州师范学院学报(2016年4期)2016-12-01
互联网天地(2016年1期)2016-05-04
潍坊学院学报(2016年6期)2016-04-18
