
基于模糊预测控制的船舶动力定位系统的设计
2012-09-27 01:41:20熊卫卫何祖军
电子设计工程 2012年3期
熊卫卫,何祖军
(江苏科技大学 电子信息学院,江苏 镇江 212003)
基于模糊预测控制的船舶动力定位系统的设计
熊卫卫,何祖军
(江苏科技大学 电子信息学院,江苏 镇江 212003)
在系统分析和研究船舶动力定位系统的基础上,提出一种基于模糊预测控制的船舶动力定位的方法,设计了模糊预测控制器。首先,在预测控制部分,探讨预测模型和反馈校正的设计;在模糊控制部分,研究隶属函数和模糊规则的具体制定。最后采用工程数据,对该算法和模糊预测控制器进行了仿真验证和性能评判,结果表明,所设计的控制器能对船舶进行有效的定位。
船舶;动力定位;模糊预测控制;数学模型
动力定位系统是一种船舶依靠自身的推力系统来抵御外界风、浪、流等环境干扰力,从而使船舶固定于海平面的某一固定位置或者沿某一航迹行驶的系统。动力定位技术与传统的锚泊定位相比,具有机动性强、定位深度不受水深影响、对海床无破坏等优点,在现代海洋开发中起到了越来越重要的作用[1]。
动力定位系统主要由3部分构成:位置测量系统、控制器、推力系统。其中,控制器控制技术的发展代表着动力定位的发展[2]。早期控制器采用传统的PID控制,现在实际应用最广泛的是基于卡尔曼滤波的LQG控制方法[3]。随着计算机技术的发展,计算和处理信息的能力不断提高,促使智能控制在动力定位中得到广泛应用。
船舶在海平面上的运动具有非线性强、大时滞、强耦合、大惯性等特点,难以建立精确的数学模型。基于此,本文采用模糊预测控制算法,将模糊控制与预测控制的优势相结合并运用于动力定位中。
基本思想是,利用预测模型得到系统未来输出的预测值,将其与设定的目标输出值进行比较得到预测误差,并将预测误差和预测误差的变化率作为模糊控制器的输入进行模糊控制器的设计。最后通过仿真验证了模糊预测控制器具有良好的控制性能。
1 数学模型
船舶在海平面上有6个自由度的运动,动力定位只对其中的纵荡、横荡和艏摇进行控制。为了更好地研究船舶的运动状态,本文建立两种坐标系。坐标系XYZ是建立在船体上的坐标系,称为随船坐标系,坐标系的原点取在船重心G处;坐标系XEYEZE是固定坐标系,也称地球坐标系。
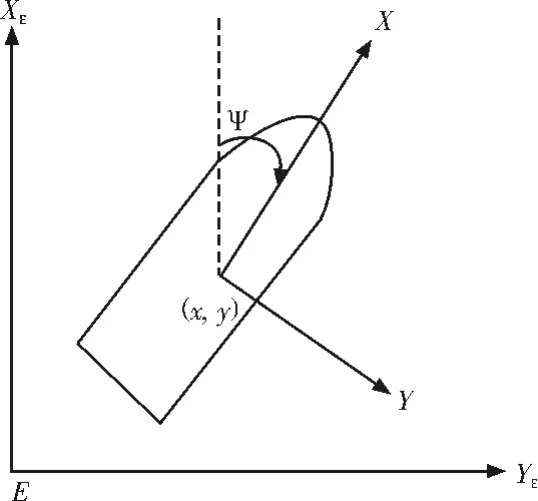
图1 坐标系Fig.1 Coordinate system
动力定位低频运动的形式有很多种,文中采用下面形式[4]:


式中,
u,v,r——船舶的纵荡速度、横荡速度和艏摇角速度;
Fx1,Fy1——与u,v有关的水动力;T1是与u,v有关的水动力矩;
Fy2,T2——与u,r有关的水动力和力矩;
Fu,Fv,Tzz——推进器产生的力和力矩;
FxA,FyA,TA——风的力和力矩;M是船舶质量;
mx,my——X,Y轴方向上的附加质量;
Izz——船舶绕Z轴转动的转动惯量;
Jzz——船舶绕Z轴转动的附加转动惯量。
2 模糊预测控制器
船舶在海平面上的运动是一个很复杂的过程,属于大时滞系统,而单纯的模糊控制是一种“事后调节”的控制方式,所以单纯使用模糊控制进行动力定位,难以取得良好的控制效果。
模糊预测控制的实质是模糊决策和预测推理的结合。利用模糊预测控制设计的控制系统框图2所示。通过预测模型,得出船舶运动下一时刻的位置预测值Yp,将其与期望目标位置Yr进行比较,得出位置偏差E及偏差变化率EC,E和EC就是模糊控制器的两个输入量。
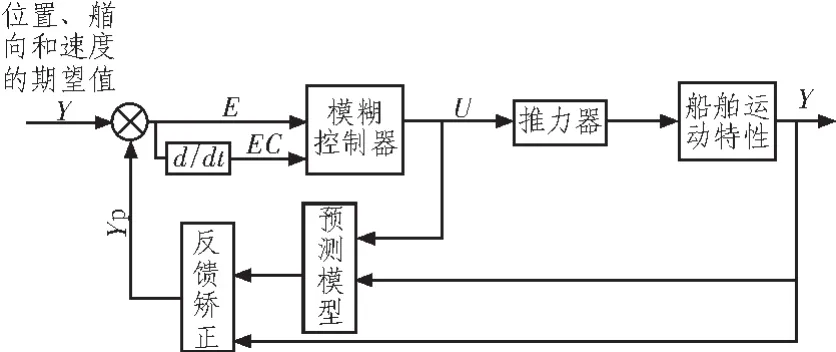
图2 模糊预测控制系统框图Fig.2 Block diagram of fuzzy predictive control system
2.1 预测控制
文中所采用的预测控制的思想:根据系统的未来输入和历史输出预测未来时刻的输出。
设被控对象基于阶跃响应预测模型的输出向量为a=[a1,a2,…,ap],其中,P 为建模时域。 在 k 时刻控制有一增量Δu(k)时,在未来时刻的预测输出值为:

其中,Y0(k+i)为初始值,i=1,…P。
在k时刻,把控制增量Δu(k)施加与控制对象,利用预测模型得出未来时刻的预测输出值Ym(k+i),这是一个比较理想的过程。但是在实际应用中,由于模型失配、外界环境干扰以及非线性等未知因素的存在,使得预测值和实际值之间可能会产生误差。因此,需要利用实时信息进行反馈矫正[5-6]。在k时刻,利用系统的实际输出y(k)进行反馈矫正。

其中,Yp(k+i)为校正后的预测值,Ym(k+i)为经过预测模型得到的预测值,h为校正向量。
通过以上的计算,可以得出船舶运动下一时刻的位置预测值,由位置预测值和目标值可以得出位置偏差及其偏差变化率的预测值,它们将作为模糊控制器的输入。
2.2 模糊控制
根据上一节所述,模糊控制器的两个输入为船舶位置的预测输出误差E及其误差变化率EC。模糊控制器的输出为控制力U。E、EC及U的论域均取为[-6,6],状态词集取为{负大,负中,负小,零,正小,正中,正大},用代码表示为{NB,NM,NS,ZO,PS,PM,PB}。 输入、输出的隶属度函数采用简单而又具有一般性的三角函数,隶属度函数曲线如图3所示。
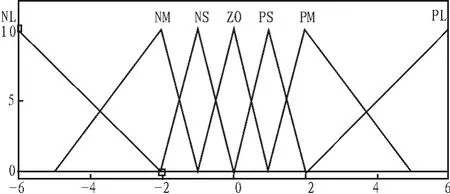
图3 输入(出)变量隶属度函数的分布图Fig.3 Membership functions of the input and output fuzzy sets
模糊控制规则库采用“if…then…”的形式,对于船舶的纵荡、横荡和艏摇。采用相同的模糊控制规则表,如表1所示。
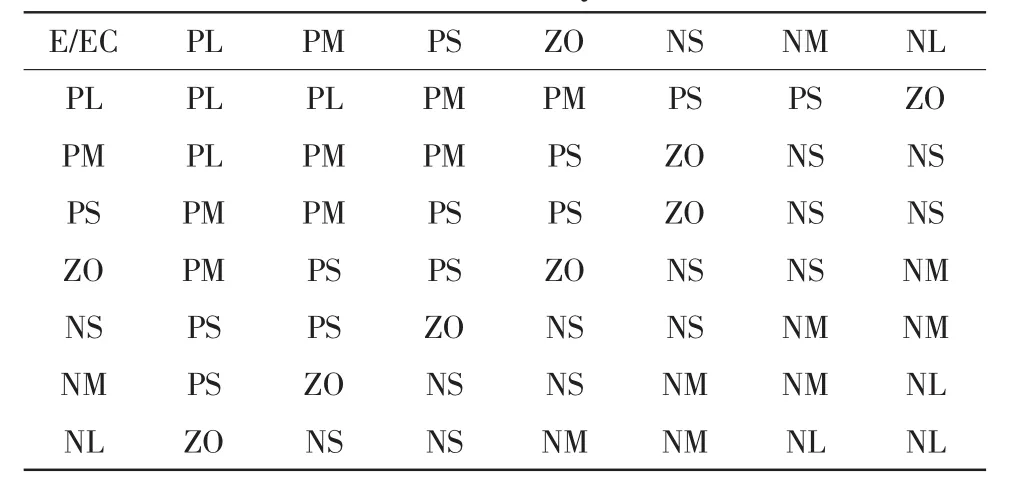
表1 模糊控制规则表Tab.1 The fuzzy rules
对于模糊控制器的输出,采用加权平均法进行解模糊[7]。
3 仿真结果
现以某水面船位研究对象,该船总长为25.5 m,宽为8.5 m,质量为 46 kg,出水量为1.81 m,排水量为38 t。
文中假设船舶的初始位置为(0 m,0 m,0°),定位点为(20 m,20 m,45°)。在静水条件下的仿真结果如图4、5和6所示。
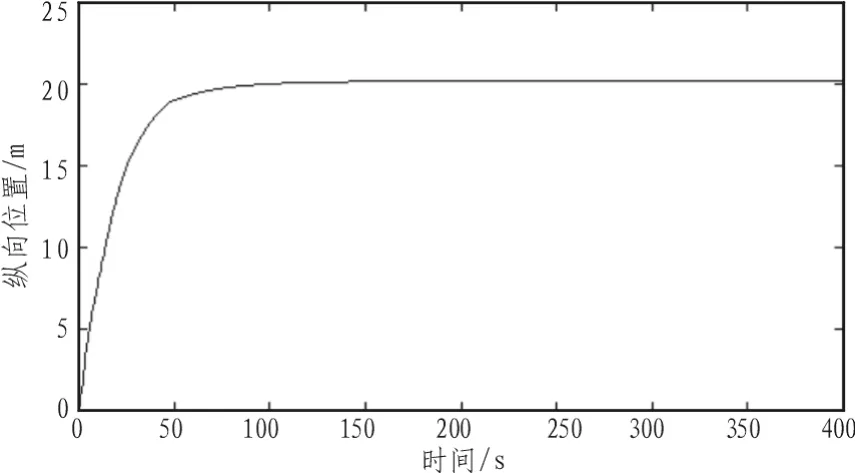
图4 纵向位置仿真曲线Fig.4 Simulation result showing in surge direction
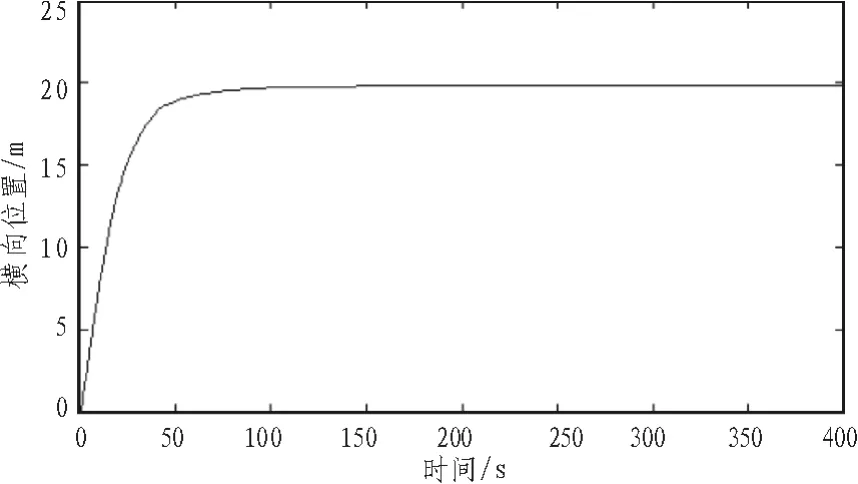
图5 横向位置仿真曲线Fig.5 Simulation result showing in sway direction
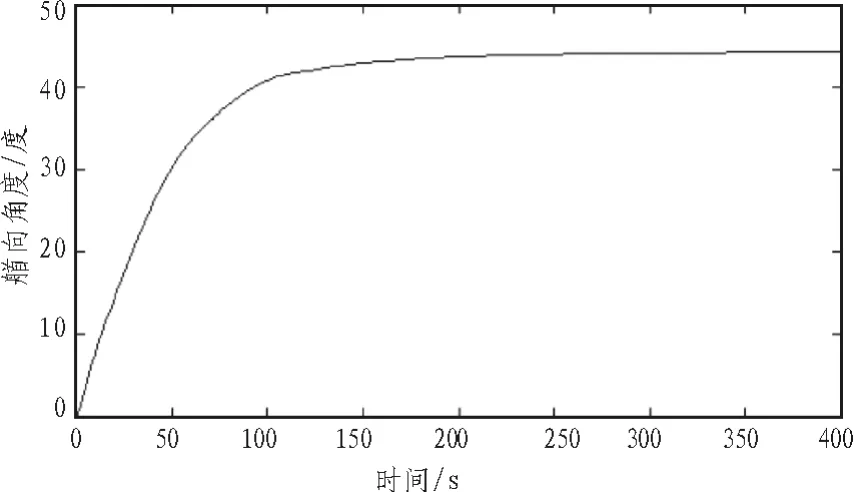
图6 艏向角度仿真曲线Fig.6 Simulation result showing in yaw direction
从仿真结果可以看出,基于模糊预测控制算法设计的控制器,在纵向、横向和艏摇3个方向上都达到了很好的控制效果,使船舶准确的从初始位置(0 m,0 m,0°)到达目标定位点(20 m,20 m,45°),达到了进行实时控制时理想的预测性能,稳态精度较高,使动力定位系统具有良好的鲁棒性和稳定性。
4 结 论
文中利用模糊控制与预测控制混合控制算法,设计了船舶动力定位的控制器,针对某船进行了仿真研究。仿真结果表明,控制器结合了模糊控制和预测控制的优点,达到了良好的控制效果。随着我国海洋事业的发展,动力定位控制技术的研究将会得到更多的重视。为了得到更先进、更成熟的控制方法,多种智能控制方法相融合的控制算法,将是动力定位控制技术研究的热点。
[1]赵志高,杨建民,王磊,等.动力定位系统发展状况及研究方法[J].海洋工程,2002(2):91-97.
ZHAO Zhi-gao,YANG Jian-min,WANG Lei,etal.The development and research method of dynamic positioning system[J].The Ocean Engineering, 2002(2):91-97.
[2]Fossen T.Guidance and control of ocean vehicles[M].New York:Wiley,1994.
[3]余培文,陈辉,刘芙蓉.船舶动力定位系统最优控制器的仿真设计[J].船海工程,2009,38(4):118-120.
YU Pei-wen,CHEN Hui,LIU Fu-rong.Simulation of optimal controller for ship dynamic positioning system[J].Ship&Ocean Engineering,2009,38(4):118-120.
[4]童进军.一种基于模型的动力定位控制系统的研究[D].上海:上海交通大学,2003.
[5]李葵芳.模糊预测控制算法研究与应用[D].东营:中国石油大学,2008.
[6]丁宝苍.预测控制的理论与方法[M].北京:机械工业出版社,2008.
[7]张桂兰,邓志良.模糊控制器在船舶动力定位系统中的应用及改进[J].中国造船,2005,46(4):26-30.
ZHANG Gui-lan,DENG Zhi-liang. Application and improvement of fuzzy controller in ship dynamic postioning systems[J].Shipbuilding of China,2005,46(4):26-30.
Design of ship dynamic positioning systems based on fuzzy predictive control
XIONG Wei-wei,HE Zu-jun
(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang212003,China)
A fuzzy predictive control scheme is proposed in dynamic positioning and a fuzzy predictive controller was designed base on the study of dynamic ship positioning.First, in the predictive control part, the designs of predictive model and correcting on line of predictive control are discussed.In the fuzzy control part,membership functions and fuzzy rules of fuzzy control are discussed.Evaluation of the algorithms and fuzzy predictive controller is made with project date.Simulation results show that the fuzzy predictive controller can hold the position and heading effectively.
ship; dynamic positioning; fuzzy control; predictive control
U664.81
A
1674-6236(2012)03-0121-03
2011-11-15 稿件编号:201111085
熊卫卫(1986—),女,山东德州人,硕士研究生。研究方向:船舶动力定位系统的智能控制。
猜你喜欢
企业界(2024年8期)2024-07-05 10:59:04
今日农业(2021年19期)2022-01-12 06:16:32
环境保护与循环经济(2021年7期)2021-11-02 08:10:54
国外核新闻(2020年8期)2020-03-14 02:09:19
制造技术与机床(2017年6期)2018-01-19 02:41:07
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年9期)2015-06-05 09:36:06
