
掩模传输交换版机械手的设计分析
2012-09-16 13:23马喜宝
电子工业专用设备 2012年12期
马喜宝
(上海微高精密机械工程有限公司,上海 201203)
掩模传输模块是光刻设备关键组件之一,其性能和功能指标直接影响光刻机的效率和产能以及产品的质量,因此提高掩模传输效能和可靠性对光刻机的整体性能指标非常关键。而掩模传输交换版机械手的结构形状则决定掩模版传输的效率和精度,也决定掩模台吸版面的结构形状和同轴对准的时间,所以掩模传输交换版机械手运动性能和空间结构的组成对掩模传输甚至整个光刻机来说,就显得尤为重要。本文主要从掩模传输交换版机械手的需求、性能、结构和可靠性及可维修性等方面做一些探讨。
1 功能和性能需求
根据掩模传输交换版机械手使用要求,必须具备的功能和性能需求。
1.1 功能需求
上下载掩模版功能:把粗预对准台上的掩模版传送到掩模台上,同时,把处于和粗预对台不同高度的掩模台上原有的掩模版传送到粗预对台上。
精细预对准功能:把粗预对台上的掩模版传送到掩模台正上方,在不同的高度,通过预对准四象限测得掩模版预对准标记相对位置的偏移量,由掩模台进行补偿。
安全互锁功能:在掩模版进行旋转交接时,有旋转和升降两种运动,在这两个运动过程中,旋转和升降要进行互相锁定,即旋转时不能上升或者下降,同样在上升或者下降时不能旋转,而且,只能是两个升降运动单元同时上升到最高位时,才能进行旋转运动。
1.2 性能需求
上版精度:线性重复精度(x、y)±10μm;
角度重复精度(θ)±50μrad;
上下掩模版时间:≤50s;
交换掩模版时间:≤30s;
可靠性:MTBF≥5000h;MTTR<2h。
MTBF为平均无故障工作时间;MTTR为平均维修时间。
根据掩模传输交换版机械手的功能和性能需求,其结构如图1所示。
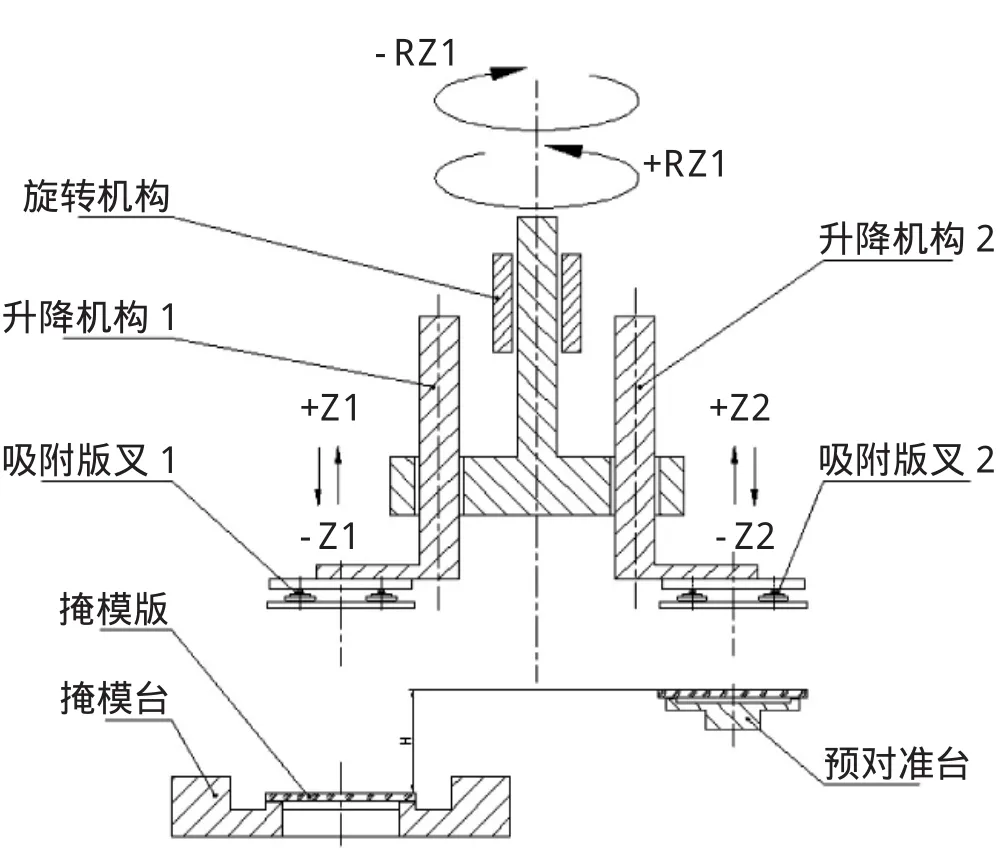
图1 掩模传输交换版机械手结构示意图
2 结构组成及运动特点
交换版机械手部件包括以下组件:旋转运动单元,两个独立的升降运动单元,两个版叉吸附单元,安全互锁单元。如图2所示。

图2 结构组成
2.1 升降运动单元
升降运动单元包含两个独立的升降机构,安装在旋转套筒内。每个升降运动单元由伺服电机(包括减速器、制动器)、联轴器、滚珠丝杠副、滚珠花键等关键零部件组成,如图3所示,伺服电机顺时针或逆时针旋转时,驱动滚珠丝杠组件上的螺母下降或抬升,滚珠花键轴的上端部通过中间的过度件和丝杠螺母连接,这样,滚珠花键随螺母一起下降或抬升,和滚珠花键轴的下端部相连的掩模版吸附单元随其作相应的运动,实现处于不同高度的掩模版的吸附和交换。
2.2 旋转运动单元
旋转运动单元主要由旋转直驱电动机(DD电动机)和过度连接件组成。旋转直驱电动机为中空式结构,装有交叉滚柱轴环作为旋转导向,可承受径向负荷、轴向负荷及力矩负荷等所有方向的负荷,如图3所示。在控制和检测方面装有零位、极限位和工作位传感器以及圆光栅组成测量系统。旋转运动单元通过直驱电机及连接件和旋转套筒相连,使旋转套筒竖直穿过旋转电机的中空型动子,并随其作±180°往复旋转,从而使整个机械手实现回转运动。
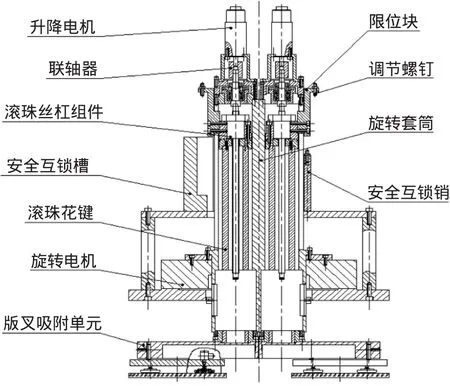
图3 掩模传输交换版机械手详细结构组成
2.3 版叉吸附单元
每个版叉单元包含连接法兰、托板、吸版架、真空吸盘、万向连接管、拉簧、拉销、调平螺钉等,共有两个结构和性能完全相同的版叉吸附单元,组成如图4所示。
竖直运动的滚珠花键轴下端部和连接法兰通过过盈配合相连,连接法兰和托板通过螺钉相连接;托板和吸版架采用三组六根拉簧弹性连接,在每组拉簧的中间装有一个固定在托板上的调平螺钉,调平螺钉一端是球形曲面,三个调平螺钉球形面分别顶在吸版架上的3个V型槽面上,转动调平螺钉推动吸版架和托板底面分离大约2mm,作为吸版架调节水平和调节高度的空间。在吸版架上设计有4个万向连接管,每个万向连接管同真空吸盘连接,真空吸盘是具有弹性的氟橡胶材料制成,吸附掩模版时,不仅能缓冲吸版架垂向运动所产生的冲击力,而且还能保证4个真空吸盘的共面性,增加吸附的密封性,确保掩模版在旋转交换时有足够的吸附力;同时在和掩模台进行掩模版交接时,能减小因掩模台吸版面和掩模版底面的不平行而造成交接精度的损失,增加交接的可靠性和安全性。
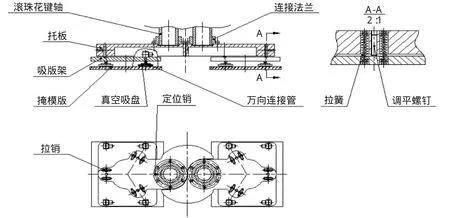
图4 版叉吸附单元
2.4 安全互锁单元
互锁结构主要有安全槽,限位块,行程调节螺钉,缓冲垫等零部件组成,实现旋转运动和垂直升降运动的互锁,确保掩模版传输的安全,如图3所示。
由于交换版机械手进行交接的两个交接版位——掩模台和粗预对准台分别处于两个不同的高度,所以,两个升降运动单元在两个交接版位垂向行程不同。当升降机构1在粗预对准位和粗预对准台进行掩模版交换时,升降机构2在掩模台上方的上版位和掩模台进行掩模版交换,固定支架在这两个位置分别安装有安全互锁槽和安全互锁销,固定不动,不随两个升降机构运动而运动。两个升降运动单元都安装有两个相同的限位块,在限位块上设计安装调节螺钉,限位块随两个升降机构运动而运动。当两个升降运动单元下降或上升时,限位块进入安全互锁槽内,防止升降运动单元在垂向运动时,发生旋转运动。当升降运动单元下降到最低位时,限位块上的调节螺钉分别同安全互锁槽和安全互锁销接触,完成两个升降运动单元机械下限位。而当两个升降运动单元运动到最高位时,限位块和安全互锁槽脱离,旋转运动单元才进行旋转运动。
3 结构的可靠性分析
可靠性可用MTBF和MTTR的数值来反映,MTBF值越大、MTTR值越小,设备的可靠性就越好,反之就越差。掩模传输旋转交换版机械手的几个组成部分通过螺栓固定在一起,组成一个独立的完整机构,其可靠性和可维修性按如下公式分析计算(基本参数见表1、表2、表3):
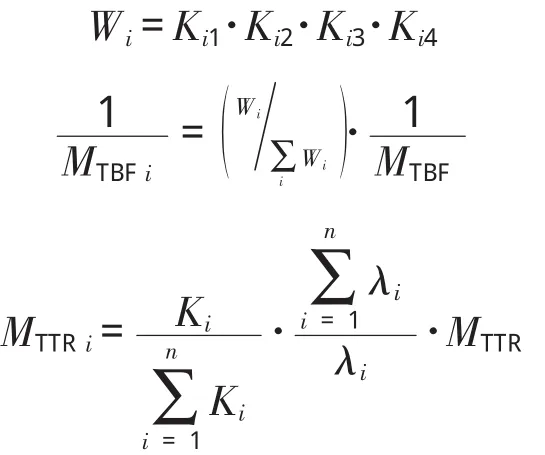
上述公式中:
Wi:综合评分数;
K1:结构复杂度;
K2:技术成熟度;
K3:时间占空比;
K4:环境因素;
MTBF:设计输入平均无故障工作时间,5000h;MTBFi:设计输出平均无故障工作时间;
MTBFs:设计输入平均维修时间,2h;
MTBFi:设计输出平均维修时间。

3 结束语
掩模传输旋转交换机械手的机构型式很多,本文针对具有两个独立的升降机构,可实现处于不同高度的掩模版进行交换的机械手加以介绍,说明了其基本组成。采用滚珠丝杠和滚珠花键相结合的设计思路,取代了传统的滚珠丝杠和滚动导轨的组合结构,结构紧凑,成本较低,装配调试效率高。版叉吸附单元采用具有弹性功能的真空吸盘和具有水平自适应功能的万向连接管,不但能很好适应吸版面和掩模版低面之间的不平行,而且也能消除4个因吸盘不共面而产生的吸附力大小差异所带来的影响。旋转运动单元采用旋转直驱电动机(DD电动机)驱动,精度高,性能可靠。采用机械式的安全互锁结构,可靠性高,成本低,方便维护和维修。

表1 维修性加权因子

表2 掩模传输旋转交换版机械手可靠性维修性分配

表2 (续)掩模传输旋转交换版机械手可靠性维修性分配
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
哈尔滨轴承(2020年4期)2020-03-17
制造技术与机床(2019年11期)2019-12-04
传感器与微系统(2019年7期)2019-06-25
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
华东理工大学学报(自然科学版)(2017年5期)2017-11-01
自然资源遥感(2017年2期)2017-04-27
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
