某型直升机旋翼转速表的数字化设计方案
2012-09-15 05:13吴光彬汪智超
直升机技术 2012年2期
吴光彬,汪智超,徐 路
(1.海军航空工程学院控制工程系,山东烟台 264001;2.海军驻景德镇地区航空军事代表室,江西景德镇 333000)
0 引言
某型直升机是20世纪80年代进口的产品,机载设备磨损、老化严重,特别是旋翼转速表,自20世纪90年代以来,因故障率太高,且无法修理,加上备件短缺,订货难,价格昂贵,已经严重影响了该型机的完好率,而且由于原设计思想落后,检测和维护难度大,国外已经停产。若立足于国产化,采用模拟、数字集成电路技术进行重新研制,可获得可观的经济效益。
1 直升机旋翼转速表的实现方法
旋翼转速指示系统由两部分组成。一部分由主减速器带动转速表传感器产生三相交流电,经远距离传输装置(同步器),通过两个指示器中的白指针指示出旋翼的转速,精度为±2rpm。图1所示为第一旋翼转速指示系统。
另一部分由主传动轴带动电磁传感器DV**转动,产生两相相位相差90°的交流电,经单—三相转换装置(斯柯特变压器)转换成三相交流电送给两个指示器,通过两个指示器中的花针指示出旋翼的转速(见图2)。正常情况下,两个指针的指示应当重合。
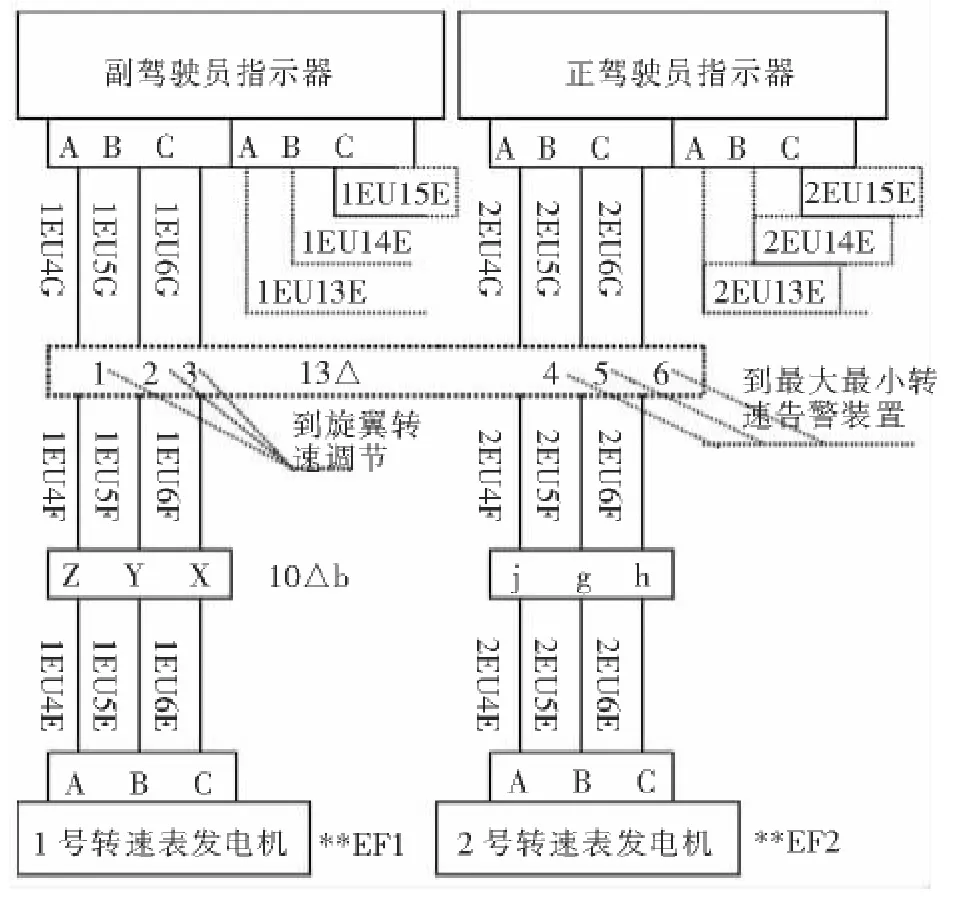
图1 第一旋翼转速指示系统
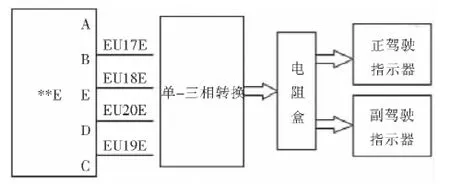
图2 第二旋翼转速指示系统
2 数字旋翼转速表方案
根据某型直升机旋翼转速表国产化研制报告的战术技术指标,改制后的旋翼转速表应能够数字显示旋翼的精确转速并模拟显示旋翼的转速范围,指示旋翼的转速是否正常,且能和进口产品互换使用,各项性能指标达到并超过原进口产品。保留原有系统的传感器,利用计算机测量技术,精确显示旋翼转速,利用模拟集成电路,指示旋翼的工作状态。其系统框图如图3所示。
改制后的旋翼转速表的表头大体如图4所示,分为第一旋翼转速数字指示系统和第二翼转速数字指示系统,绿灯代表转速正常,橙灯代表转速超出5%,蓝灯代表转速低于正常转速5%,红灯代表转速超出正常范围5%以上的所有情况。
改制后的旋翼转速表的系统主要由四部分组成:滤波整形电路、数字显示驱动电路、单片机数字处理系统及DC/DC电源变换。
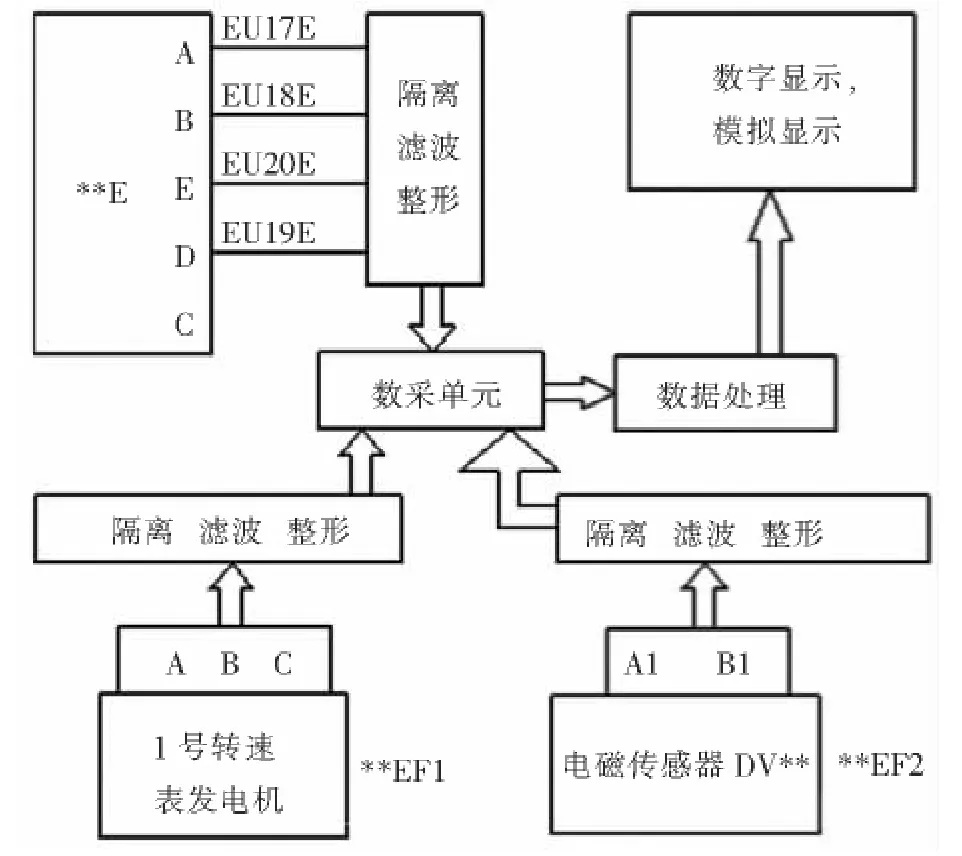
图3 改制后的旋翼转速表系统原理框图
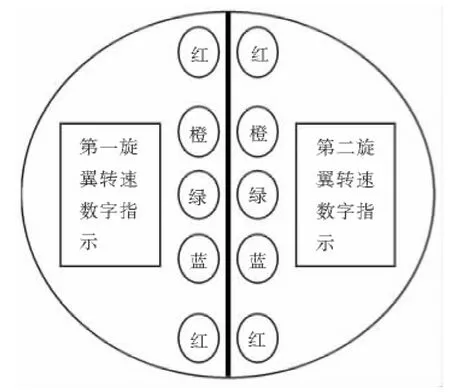
图4 改制后的旋翼转速表表头
2.1 滤波整形电路[1]
2.1.1 转速表发电机传感器信号处理
从转速表发电机(传感器)得到的旋翼转速信号(图5),为三相正弦电压信号,幅值约为36V,经电阻 R1、R4,电容器 C1 以及 R2、R5,电容器 C2、R3、R6,电容器 C3分压之后,加到二极管 D1、D2、D3的正极上,从三个二极管的公共负端上输出的电压是经过半波整流之后的三相交流电的合成电压。其交流成分的基波频率是每相交流电频率的六倍。Q1是一个光电耦合器,从三个二极管的公共负端上输出的交流电压信号经电容器C4耦合加到Q1的基极,信号经7404反相后,加到LM139限幅整形电路,输出一个幅值5V、频率为653~726Hz之间的左右方波信号。
2.1.2 单相电磁感应式传感器的信号
单相电磁感应式传感器DV**产生的信号(图5)为两相正弦交流电压信号,彼此的相位差为90°,幅值约为24V,对该信号进行分压,加到两个二极管的正极上,从两个二极管的公共负端上输出的电压是经过半波整流之后的两相交流电的合成电压,其交流成分的基波频率是每相交流电频率的四倍。其信号处理过程与前述一样,输出一个幅值5V、频率为422~469Hz之间的方波信号。
2.2 单片机F/D变换电路[2]
频率-数字变换的方法主要有两种:一种为M法,即测量一定时间内信号脉冲的个数,适合高频工况;一种为T法,即测量速度信号两脉冲之间的间隙时间,适用于低频工况。考虑到人眼对快速变化的数字没有反应时间,本方案设计的转速表的更新时间间隔为1秒,且软件采用了抗干扰的平滑算法,因此,频率-数字变换方法采用的是简单的M法。
考虑到仪表结构的限制,此方案选用的单片计算机AT89C51是一带有4K字节闪速可编程可擦除只读存储器(EEPROM)的低电压、高性能 8位CMOS微型计算机,与MCS-51指令集和引脚结构兼容,40只引脚,PDIP封装。
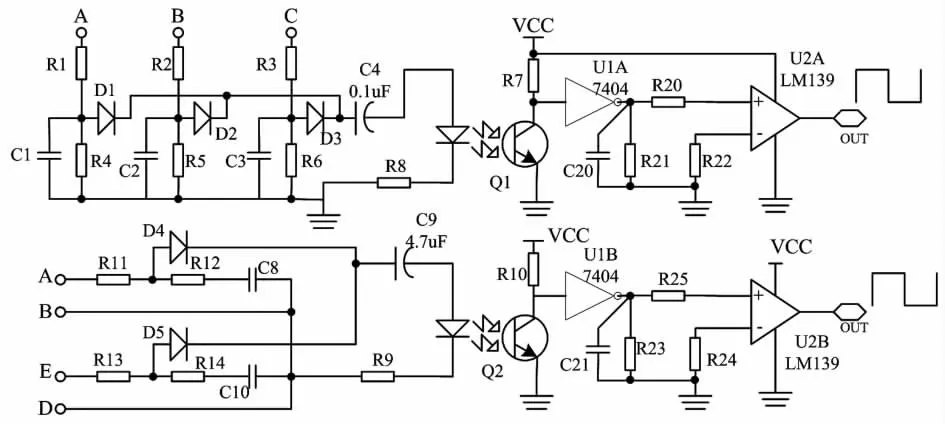
图5 滤波整形电路
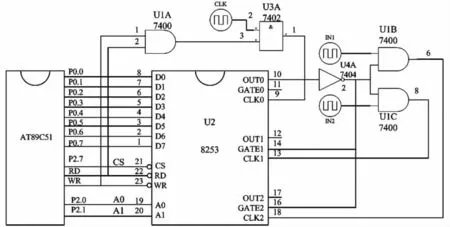
图6 单片机F/D变换电路
数据采集单元以8253定时器为核心(图6),其原理主要是:启动定时器,精确定时0.2s时间段,在此时间内,计数器对旋翼转速表的传感器信号(已经转换为脉冲信号)进行计数,经抗干扰的平滑算法,可得旋翼转速表的精确转速。
2.3 数字显示驱动模块[2]
旋翼转速表的精确转速利用高亮度的LED显示,由MC14513驱动的三位数字显示器,为静态工作方式,对高位0进行自动消隐。当三位数均为0时,只显示个位0,而十位和百位的0不显示,被消隐。此三位静态显示器能显示0~999之间的整数。
2.4 DC/DC 变换
机上所提供的电源为27V直流电,由于旋翼转速表使用的电源为+5V,所以进行DC/DC变换。MTR2805S是单片式DC/DC变换器,该器件内部包括:具有温度补偿的基准电源、比较器、可控占空比振荡器(含限流电路)、驱动器和大电流输出开关。MTR2805S具有下列主要特点:输入电压范围16~40V,备用电流很小,输出电流限制,输出开关电流可达6A,输出电压可调,工作频率可达2MHz,精度为2%,效率可达84%。
3 软件框图
旋翼转速表的软件用汇编语言编写[3],主要有五部分:定时器初始化、分频器初始化、频率/数字变换、数字滤波和结果显示(图7所示)。

图7 软件框图
4 误差估计
由于旋翼转速表的转速测量误差主要出现在频率/数字变换的过程中,由传感器测得的交流信号到标准方波信号的变换过程中,几乎没有误差,数字转速在显示的过程中也不存在误差,因此旋翼转速表的转速测量误差比较小,也比较容易控制。
4.1 第一测量通道
从转速表发电机(传感器)得到的旋翼转速信号,为三相正弦电压信号,频率为
4.2 第二转速测量通道
单相电磁感应式传感器DV219产生的信号为两相正弦交流电压信号,彼此的相位差为90°,幅值为24V。对该信号进行分压,加到两个二极管的正极上,从两个二极管的公共负端上输出的电压是经过半波整流之后的两相交流电的合成电压,其交流成分的基波频率是每相交流电频率的四倍。DV219输出信号的频率为
[1]吴光彬,王栋,等.基于BP神经网络算法的飞机发动机火警信号系统研究[J].海军航空工程学院学报,2008,(4).
[2]张毅刚,彭喜源,等.MCS-51单片机应用设计[M].哈尔滨:哈尔滨工业大学出版社,1997.
[3]张载鸿.微型机接口控制教程[M].北京:清华大学出版社,1992.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(趣味科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
中国有色金属(2020年14期)2020-12-09
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
电子制作(2016年19期)2016-08-24
中学物理·高中(2016年1期)2016-05-26
中学科技(2015年10期)2016-01-06
新高考·高一物理(2015年6期)2015-09-28