
基于CRUISE的混联式混合动力汽车电动优先混合控制策略仿真
2012-09-14 07:29蔡啸霄严运兵
武汉科技大学学报 2012年4期
蔡啸霄,严运兵
(武汉科技大学汽车与交通工程学院,湖北武汉,430081)
基于CRUISE的混联式混合动力汽车电动优先混合控制策略仿真
蔡啸霄,严运兵
(武汉科技大学汽车与交通工程学院,湖北武汉,430081)
针对一款开发中的混联式混合动力轿车,在分析其布置形式与工作模式的基础上,提出电动优先的混合控制策略,搭建基于CRUISE的整车仿真模型,用C语言编写了电动优先混合控制策略,利用C-function模块将其嵌入到CRUISE模型中进行耦合仿真,并对控制策略进行优化和评价,验证控制策略的可行性;结合目标车型的期望性能,对仿真车型动力系统进行了匹配,为实车设计提供了参考依据。结果表明,控制策略达到了预期目标且合理适用。
CRUISE仿真软件;混合动力轿车;动力匹配;电动优先混合控制
随着全球石油资源日益枯竭、国家节能减排任务加重以及汽车保有量扩大所带来的污染日趋严重,寻找清洁的替代能源已成为未来可持续发展的核心问题。各国在制定更加严格的节能减排政策和排放法规的同时,也在不遗余力地进行电力、氢动力等新能源汽车及燃料电池的研发工作。
尽管电气化和零排放是未来汽车发展的主要方向,但就目前情况来说,纯电动汽车的推广还存在安全问题和充电桩架设缺口问题,而油电混合动力汽车已经有了较成熟的技术,并已拥有相当规模的市场。作为兼顾电动汽车和传统汽车优点的新一代汽车结构型式,油电混合动力汽车由于在环保和节能方面优势明显,且动力性接近于传统汽车,生产成本也低于纯电动汽车而日益受到汽车工业界的重视,近年来已成为世界上各大汽车公司和开发机构研究的热点[1]。
CRUISE仿真软件是奥地利李斯特内燃机及测试设备公司(AVL List Gmb H)开发的研究汽车动力性、燃油经济性、排放性能及制动性能的仿真分析软件,它采用模块化的设计方法,可以对任意结构形式的汽车传动系统进行建模和仿真,可用于汽车开发过程中动力系统的匹配、汽车性能预测和控制策略模拟,还可用于混合动力汽车和电动汽车的动力系统、传动系统及控制系统的开发与优化。目前CRUISE结合AVL公司旗下其他软件在传统汽车基础上研发新型动力总成和模拟测试方面有着举足轻重的地位,而对于新能源汽车方向尚未过多涉足。本文选择一款开发中的混联式混合动力汽车进行匹配,在CRUISE环境中建立仿真模型并对相关控制策略进行验证。
1 目标车型布置与期望性能
目标车型采用混联方案,其驱动系统布置如图1所示。系统中,发动机、发电机、电动机同轴布置,发动机/发电机组和电动机分别布置在离合器两侧。整车的期望性能如下:0~100 km·h-1加速时间为12 s;最高车速为160 km·h-1;纯电动续驶里程为25 km。
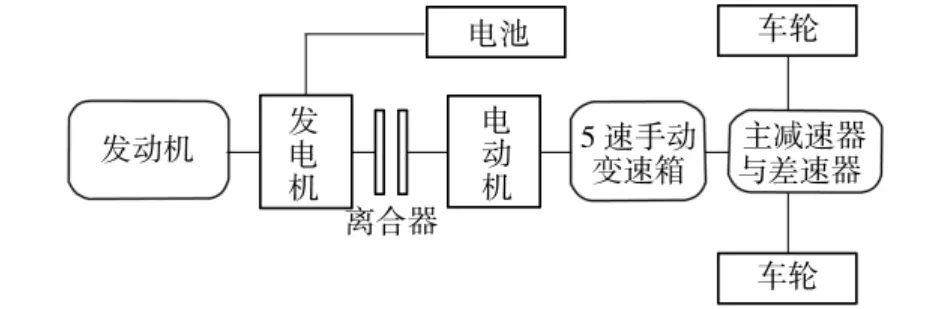
图1 目标车型驱动系统布置Fig.1 Drivetrain configuration of target vehicle
2 电动优先混合控制策略的制定
为达到期望的性能指标,需对发动机、发电机、电动机及电池组进行功率匹配。功率匹配除了与驱动系统布置有关外,还受动力系统工作模式及能量分配策略等方面因素的影响。
根据图1的系统布置,整个行驶模式主要分为以电动机为主的电量消耗模式和以发动机为主的滑行与充电模式。在电池荷电状态(SOC)充足的情况下,车辆主要运行在电量消耗模式,主要包括纯电动模式、混合动力模式和制动再生模式等子模式。当电池SOC降至一定范围内时,运行模式为以发动机驱动和发电机发电为主的滑行与充电模式,即当电池电量降到一定水平需要充电时,电动机关闭,发动机起动,并带动发电机对电池进行充电。
结合上述工作模式分析,本文采用了电动优先混合控制策略,即循环工况开始,车辆首先以电动机带动车辆起步,电池SOC值由设定最大值开始下降。电池SOC值下降至设定最小值之前,以电动机工作为主,发动机工作为辅:①当需求转矩小于电动机最大转矩时,电动机提供驱动所需全部转矩,发动机停止工作;②当需求转矩超过电动机最大转矩时,电动机工作在最大转矩区,同时发动机起动,补充不足部分转矩,并控制发动机尽量工作在最优区间内。电池SOC下降至小于设定最小值后,电动机先关闭,停止耗电,再转为以发动机工作为主,电动机工作为辅:①当需求转矩小于当前转速下发动机最优曲线对应转矩时,发动机继续工作在最优曲线上,多余转矩经由发电机转换为电能储存于动力电池中;②当需求转矩大于当前转速下发动机对应的最大转矩时,则电动机启动并对转矩进行补偿。整个控制过程中电池SOC在一个预先设定的小范围内上下波动,以保护电池不会过度放电。
上述各种工作模式的切换以电池SOC、需求转矩、制动踏板ON/OFF等为触发条件。
3 CRUISE整车建模与仿真
CRUISE的应用可以贯穿到整个开发环节。作为总成设计基础上的一种细化,零部件匹配设计可对动力传动系统中的主要零部件(发动机、电动机、电池及相关的控制和管理系统)的技术参数提出设计要求,进行相关的组合匹配,对车辆的控制策略进行初步的设计,根据控制策略以及车辆的设计目标,确定零部件的具体参数并对基本控制策略进行验算。
参考驱动系统布置,利用CRUISE软件中所提供的图形化操作界面,可以从各大模块组中选择合适的模块,构建出系统框图,得到如图2所示的CRUISE整车模型。模型中包含整车模块、驾驶员模块、发动机模块、变速箱模块、离合器/电控离合器模块、发电机/电动机模块、电池模块、主减速器/差速器模块和轮胎/制动模块以及各种工况所对应的控制策略模块[2-3]。
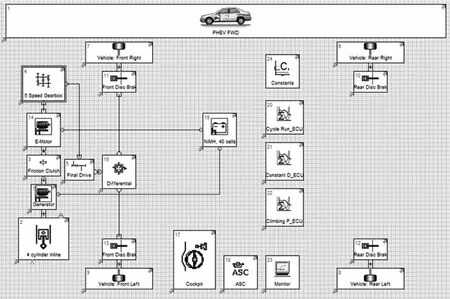
图2 CRUISE仿真模型Fig.2 Simulation model in CRUISE
CRUISE可以实现对车辆循环油耗(针对不同的循环工况)、等速油耗(任意档位和车速下)、稳态排放、最大爬坡度(驱动防滑ON/OFF)、最大牵引力(牵引功率)、最大加速度、最高车速、原地起步连续换档加速、超车加速性能(直接档加速性能)、车辆智能巡航控制和制动/反拖/滑行等一系列车辆性能的计算分析[4],在基于传统车辆模型的基础上可以快速搭建纯电动汽车或混合动力车辆模型,并可通过与Matlab或C语言的接口实现整车控制策略的设计开发。本文选择C语言对目标车型的控制策略进行了编程,并嵌入到C-Function模块中。经过性能仿真与优化,得到该车型主要部件的匹配结果如表1所示。

表1 零部件匹配参数Table 1 Vehicle parameters
为了客观地评价整车控制策略,在CRUISE仿真环境下于Task Folder的Cycle Run中分别选择UDC(欧洲城市工况)、FTP75(美国城市工况)和NEDC(新欧洲循环工况)3种行驶循环工况进行分析,各工况均包含市区低速工况和郊区高速工况,主要测试系统以电池SOC和电动机为主导的控制模式下车辆是否能满足工况需求。
进入Calculation Center开始仿真,得到各种循环工况的仿真结果如表2所示。
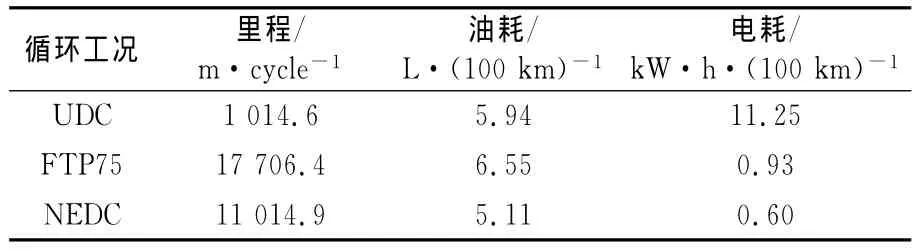
表2 循环工况仿真结果Table 2 Simulation results of driving cycle
仿真结束后在Energy Flow Graphics中可以按仿真步长方式复现整个仿真流程。以NEDC循环工况为例,仿真车辆的工况参考速度与实际速度对比如图3所示。由图3中可以看出,仿真车型的实际速度与工况参考速度误差控制在5%以内,符合控制策略预期要求。
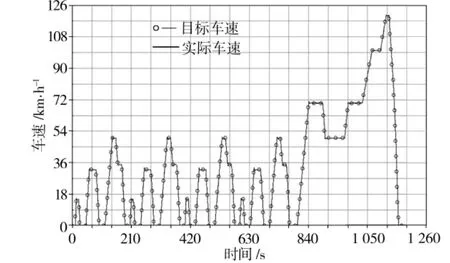
图3 目标车速与实际车速对比图Fig.3 Comparison of desired velocity and current velocity
图4所示为所模拟发动机的最优工作曲线。图5所示为发动机工作点的仿真结果(颜色越深表明发动机所在工作区间的时间历程占整个仿真时间的比率越大)。由图5中可知,除怠速阶段外,发动机工作点大体符合预期控制策略规定。

图4 发动机最优工作曲线Fig.4 Optimal operating curves of the engine
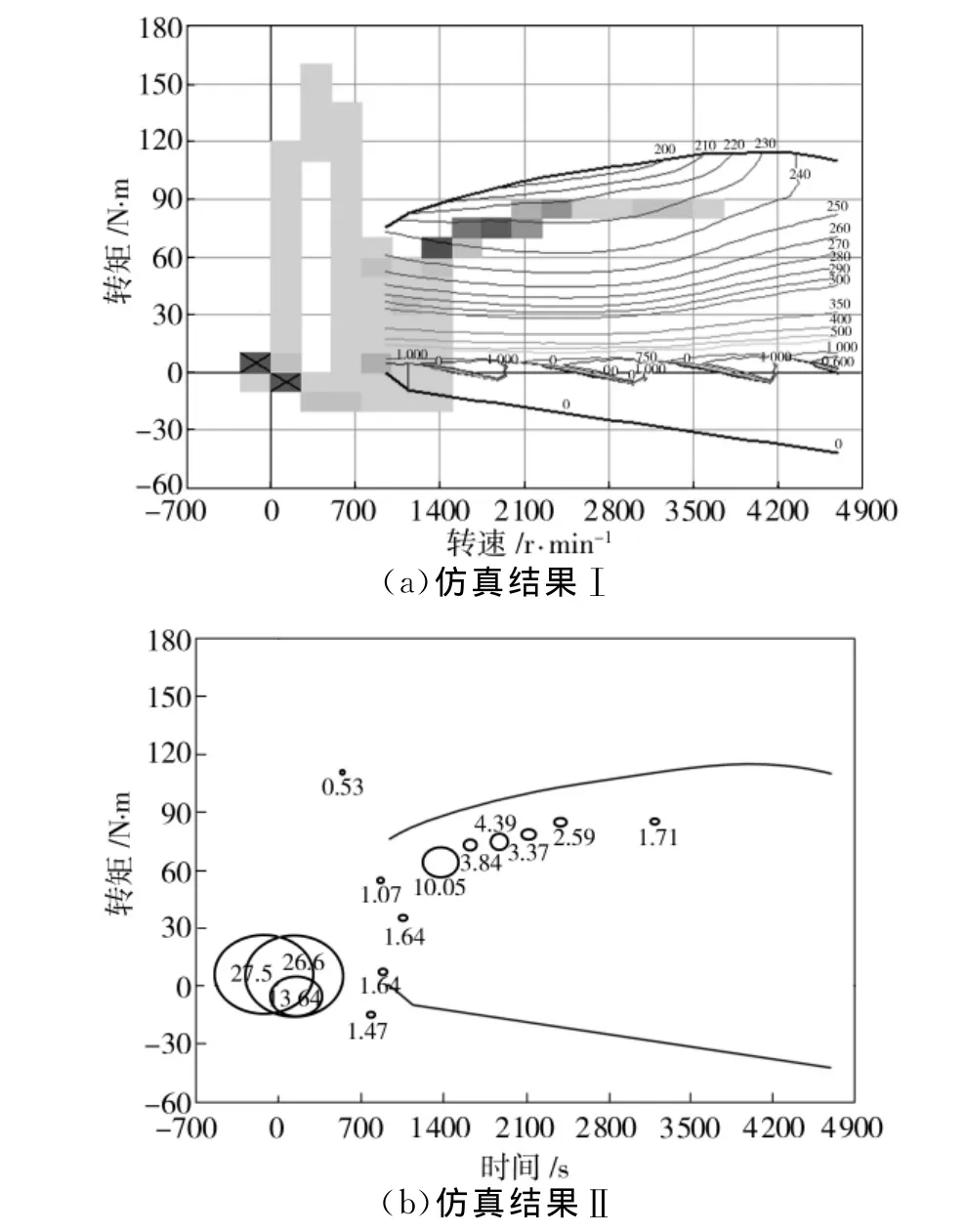
图5 发动机工作点的仿真结果Fig.5 Simulation results of engine operating points
在Task Folder中继续添加Constant Driving和Climbing Performance任务可对仿真车型的动力性如百公里加速时间、纯电动续驶里程等进行全面评价,所得结果与目标车型性能对比如表3所示。由表3中可见,仿真结果与目标值误差在5%以内,可以达到设计目标的要求。

表3 仿真车型与参考车型动力性对比Table 3 Power comparison of simulation vehicle and referred vehicle
4 结语
本文结合目标车型驱动系统的布置,对其工作模式进行了分析,并制定了电动优先的混合控制策略,为整车动力系统匹配奠定了基础。在CRUISE环境中搭建了与目标车型对应的仿真模型,并利用CRUISE的功能对目标车型动力系统进行了匹配,为油电混合动力汽车的开发提供了参考依据。对电动优先混合控制策略进行了仿真验证,结果表明控制策略达到了预期目标且合理适用。
[1] 康龙云.电动汽车最新技术[M].北京:机械工业出版社,2008.
[2] 姜海斌,黄宏成.CRUISE纯电动汽车动力性能仿真及优化[J].机械与电子,2010(4):4-6.
[3] 王保华,罗永革.基于CRUISE的汽车建模与仿真[J].湖北汽车工业学院学报,2005,19(2):2-3.
[4] 赵海峰.基于CRUISE软件的AMT车辆性能仿真分析与实验研究[D].重庆:重庆大学,2005.
Simulation of a motor-prior control strategy for a series/parallel HEV based on CRUISE
Cai Xiaoxiao,Yan Yunbing
(College of Automobile and Traffic Engineering,Wuhan University of Science and Technology,Wuhan 430081,China)
A motor-prior control strategy for a series/parallel HEV in development was proposed through an analysis of the characteristics of its layout and working modes.By creating the HEV model in CRUISE and transforming the control strategy into C language,a co-simulation was performed with CRUISE and C-function module.The result shows that it is able to evaluate and optimize the control strategy and verify its feasibility.On this basis,it offers a match for the powertrain system of simulation model according to the desired performance of target vehicle,and provides a reference to real car design.
CRUISE;HEV;powertrain match;motor-prior control strategy
U469.72
A
1674-3644(2012)04-0304-04
[责任编辑 郑淑芳]
2011-12-01
国家自然科学基金资助项目(61074036).
蔡啸霄(1987-),男,武汉科技大学硕士生.E-mail:caixiaoxiao.jlu@gmail.com
严运兵(1968-),男,武汉科技大学教授,博士.E-mail:yyb@wust.edu.cn
猜你喜欢
防爆电机(2022年2期)2022-04-26
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
中国塑料(2014年12期)2014-10-17
