
基于总线的移动式钢轨闪光焊机控制系统
2012-09-06 08:42吕其兵贺颂戴晓纲
电焊机 2012年6期
吕其兵,贺颂,戴晓纲
(1.西南交通大学焊接研究所,四川成都610031;2.西南物资公司,四川成都610051)
基于总线的移动式钢轨闪光焊机控制系统
吕其兵1,贺颂1,戴晓纲2
(1.西南交通大学焊接研究所,四川成都610031;2.西南物资公司,四川成都610051)
移动式钢轨闪光焊机现场施工时,焊机机头与控制柜之间操作、检测和控制信息的传递通过电缆进行,该连接电缆芯数多且距离长,从而导致控制系统故障率高,且检修难度大。针对上述问题,提出了基于CC-link总线设计系统的软硬件解决方案。采用FX2N-16CCL-M主站模块、FX2N-64MR三菱PLC、AJ65SBTB1-16D和AJ65SBTB1-16T数字量模块重新设计了基于总线的移动式钢轨闪光焊机控制系统,从而使机头和控制柜之间的信息通过总线进行传输,大大减少了焊机机头和控制柜之间连接电缆的芯数,提高了可靠性,降低了检修难度;分析新系统通过总线进行信息传输的速度和控制速度,采用总线方式完全能满足控制系统实时性的要求。通过现场试焊表明,新系统能完成钢轨的焊接。
CC-link;FX 2N-16CCL-M;钢轨闪光焊;控制
0 前言
国内钢轨现场焊中常用的焊接方法有铝热焊、闪光焊和气压焊,由于钢轨闪光焊具有焊接生产效率高、焊接接头质量受人为因素影响小且质量高的优点,移动式钢轨闪光焊在无缝线路建设中占据着重要的位置。钢轨移动式闪光焊设备主要包括自带发电机的集装箱式闪光焊轨机和自行走式焊轨车两种,不管是哪一种焊接设备,控制柜与焊机机头之间的连接电缆都多而长。由于在现场焊轨中机头频繁动作,使得连接电缆内部的线经常破断,导致焊接设备故障率高,并且电缆芯数多,检测困难,焊机出现故障维修困难,影响无缝线路的建设。为此提出了基于总线方式进行机头信号检测和动作控制的方案。由于连接总线只有三根,电缆芯数少,便于保护和维护,从而提高了设备运行的可靠性。
总线控制系统实时性好,在工业领域的应用十分广泛[1]。工业控制领域的网络系统一般分三层,即管理层、控制层和设备层。CC-link是设备层的网络系统,是一种可以同时高速处理控制和信息数据的现场网络,可以提供高效、一体化的工厂和过程自动化控制,在10 Mbps的通信速率下传输距离可达100 m,并能够连接64站。其卓越的性能使之通过ISO认证成为国际标准,并且获得批准成为中国国家推荐标准GB/T19760-2008,同时已取得SEMI标准[2]。为此本系统采用CC-link总线进行设计。
1 控制系统硬件及软件设计
1.1 硬件设计
系统总体框图如图1所示,上部虚框内的所有组件在控制柜中,下部虚框内的全部组件在焊机机头上,上下虚框之间的连接除比例阀和位移传感器外都通过总线相连。主站由三菱FX2N系列PLC和FX2N-16CCL-M主站模块组成,以实现与I/O模块通信、处理反馈信息和控制焊机机头动作。从站主要由AJ65SBTB1-16D(16路数字量输入模块)和AJ65SBTB1-16T(16路数字量输出模块)构成,由AJ65SBTB1-16D采集焊机机头上的所有数字量信号,并通过总线传给主站,主站对传输回来的信息进行运算处理和判断,并将运算结果通过总线传给输出模块,控制液压阀驱动板驱动相应的执行元件实现对闪光焊机机头的控制,待主站处理后输出控制,完成闪光焊接中机头的所有动作。与原有控制系统相比有以下不同:原焊机机头的所有输入和输出数字信号全部通过独立的信号线与控制柜进行信号传递,而新控制系统焊机机头上的数字信号由主站模块通过总线与焊机机头上的从站模块进行通信,实现所有数字信号的输入与输出控制。
1.2 软件设计
控制系统软件在原系统软件的基础上进行如下改进:
(1)在原有的UN-150焊机控制程序中加入总线网络配置程序,使通过总线读入的数字信息对应原程序的所有输入点。
(2)运算结果的输出原程序是通过PLC的输出触点进行控制,新程序使输出触点对应输出模块AJ65SBTB1-16T的相应点。
通过上述改进,就可利用原来的程序实现基于CC-link总线模式的焊机控制。主站和远程I/O站之间通信时的基本程序设计流程如图2所示。
在通信程序开始运行前,要将整套网络的配置参数写入主站模块中。
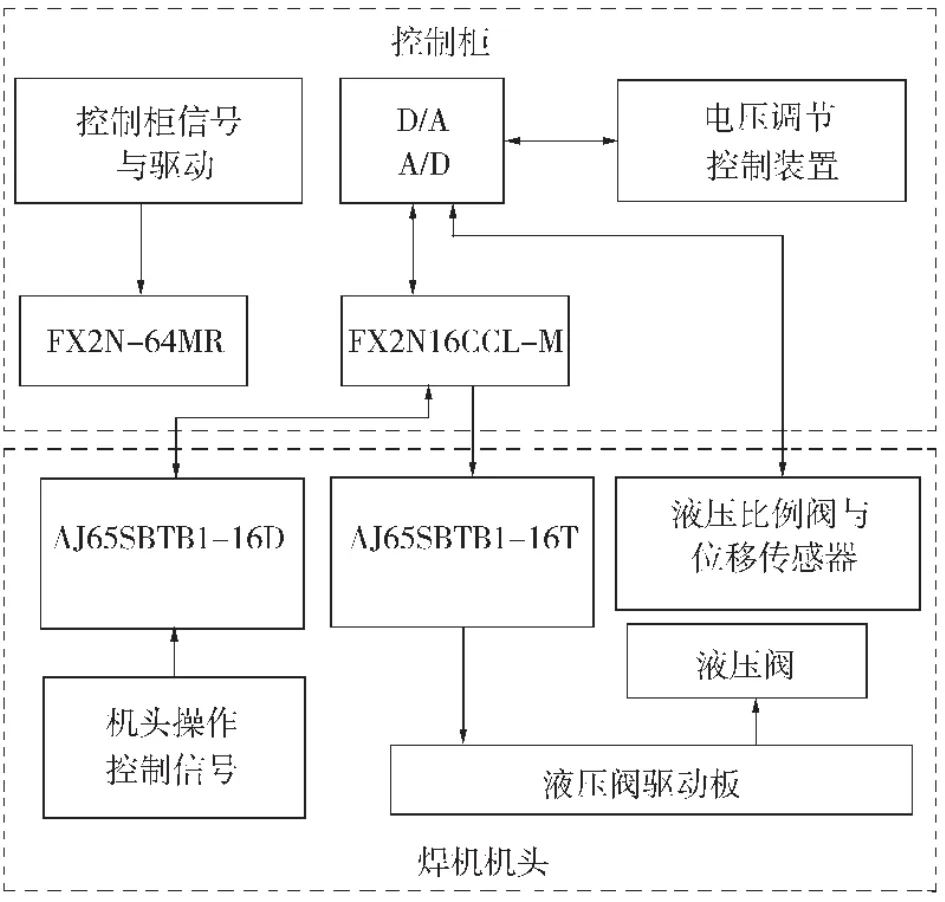
图1 系统总体框图

图2 基于总线的信息传输程序框图
2 控制信号响应时间计算与分析[3]
在UN-150ZB钢轨闪光焊机中,机头与控制柜之间的距离大约10 m,机头上输入与输出模块之间的距离小于50 cm。系统的控制信号相应时间T为

式中SM1为信号输入延迟时间;SM2为信号输出延迟时间;T1为PLC程序扫描和执行时间。
(1)信号输入延迟时间

(2)信号输出延迟时间

式(2)、式(3)中的LS为系统的链接扫描时间,其计算式为:
LS=BT{29.4+(NI·4.8)+(NW·9.6)+(N·32.4)+(ni·4.8) +(nw·9.6)}+ST+通信故障站的数量·48·BT·重试的次数(4)式中BT为常数(传输速度),该参数按表1进行选择;NI为a和b中最后站点的数量;NW为b中最后站点的数量;N为连接的模块数量;ni为a+b(保留站除外);nw为b(保留站除外);ST为800+(a·15)、900+(b·50)中的最大值(其中a为被远程I/O站占用的站点数,b为被远程设备站占用的站点数)。

表1 传输速度与常数BT的对应关系
在新系统选用的AJ65SBTB1系列模块中,设定的传输速度分为五档:10 Mbps、5.0 Mbps、2.5 Mbps、625 kbps、156 kbps。本控制系统选用5.0 Mbps档。系统各相应参数如下:

由式(4)可计算出LS=1.042 16 ms;
由式(2)计算出SM1=2.784 32 ms;
由式(3)计算出SM2=3.826 48 ms。
由上述计算可知,整个系统操作控制信号输入、运算和输出响应时间大约10 ms,而系统的液压阀等响应都是毫秒级的,因此新系统能满足闪光焊机实时控制的目的。
采用上述软硬件进行了机头的操作控制和焊接试验,结果表明,操作及动作响应与原系统无异,焊接过程能顺利完成。
3 结论
(1)基于总线的控制系统减少了信号传输线的数量,提高了设备运行的可靠性,降低了维护难度。
(2)所设计的基于总线的控制系统能够满足移动式闪光焊机在焊接过程中的信号传输和处理的实时性和系统的高抗干扰能力的要求。
[1]狄锦,潘声启,张虎.时速300 km铁路客运专线长钢轨焊接施工方案[J].中国铁路,2005(8):64-68.
[2]杨静,顾战松.CC-link网络及应用[J].北京:机械工业出版社,1991.
Research on control system of mobile rail flash butt welding machine on the basis of bus
LV Qi-bing1,HE Song1,DAI Xiao-gang2
(1.Institute of Welding,Southwest Jiaotong University,Chengdu 610031,China;2.South-west Material Co.,Ltd.,Chengdu 610051,China)
The operation,sensor,and control information between the machine and controller is transferred through the cable when the mobile rail flash butt welding machine is used in continuous line construction,because the cable is long and multi-core,the control system is of low reliability,and is difficult to be maintained.According to the problem mentioned above,a new project based on CC-link was put forward to solve this problem.The control system was designed on the basis of the host module FX2N-16CCL-M、the PLC FX2N-64MR and the digital module AJ65SBTB1-16D/T,so the core of the cable,through which the information between the machine and controller was transferred,was reduced,the reliability was improved,and the maintenance was become easy.The control system's response rate and information's transmission rate was analyzed,and the new control system can demand the real-time request.The experiment indicated that the new control system could finish the welding process.
CC-link;FX 2N-16CCL-M;rail flash butt welding;control
book=6,ebook=35
TG409;TG438
A
1001-2303(2012)06-0051-03
2011-01-19;
2012-03-16
吕其兵(1967—),男,四川井研人,教授,教研室主任,博士,主要从事计算机检测及控制方面的研究和焊接设备自动化及焊接质量在线检测与控制研究工作。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
锻压装备与制造技术(2021年3期)2021-08-13
中国特种设备安全(2019年10期)2020-01-04
中国特种设备安全(2019年4期)2019-05-20
电子制作(2017年17期)2017-12-18
现代工业经济和信息化(2016年12期)2016-05-17
焊接(2016年1期)2016-02-27
肿瘤预防与治疗(2015年1期)2015-09-26
焊接(2015年10期)2015-07-18
焊接(2015年9期)2015-07-18
