陀螺用H型动压气浮轴承电机启动特性
2012-09-05 10:35孙丽,张俊
空间控制技术与应用 2012年5期
孙 丽,张 俊
(1.北京控制工程研究所,北京100190;2.天津航海仪器研究所,天津300131)
孙定浩,叶东东,张 扬
(北京控制工程研究所,北京100190)
陀螺用H型动压气浮轴承电机启动特性
孙 丽1,张 俊2
(1.北京控制工程研究所,北京100190;2.天津航海仪器研究所,天津300131)
为满足卫星长寿命应用的需求,H型动压气浮轴承在陀螺上得到了应用.在应用过程中,对其有了更深刻的认识.首先介绍动压气浮轴承的基本结构及原理,然后对H型动压气浮轴承不同姿态下的启动特性进行详尽地分析,并给出研究结果及启示.
动压气浮轴承;启动特性;基本结构
目前,中国卫星用惯性姿态敏感器多选用单自由度液浮速率积分陀螺,其已有 30多年的应用经历.该类陀螺仪回转部分的支承为滚珠轴承,由于滚珠轴承自身的结构特点和一些技术上的原因,很难做到长寿命和高可靠.为解决这一问题,在原以滚珠轴承为支承的液浮陀螺基础上研发了动压气浮轴承的液浮陀螺仪,并称其为二浮陀螺.由于该陀螺仪采用了动压气浮轴承,其轴承的转动部件和静止部件无机械接触,因此极大地延长了产品寿命,提高了可靠性.
1 动压气浮轴承的基本结构及原理
动压气浮轴承是指以无源气体形成自润滑气膜的轴承.该气膜通过轴承匹配表面的切向相对运动,在轴承间隙内产生一定的压力来支持负载,由于轴承高速旋转时没有机械接触,因此实现了连续运行的长寿命.同时,也大大降低了轴承的噪声水平.基于以上两点,长寿命、低噪声陀螺应用场合都趋于采用动压气浮轴承.
1.1 动压气浮轴承的基本结构
动压气浮轴承主要有3种结构形式:平面圆柱组合型(简称H型)、锥型和半球型,见图1~3.半球型结构对几何失调敏感程度小,球面本身具有自对准,但研制经验尚少.锥型结构加工较困难,两锥体几何对准难,且不易保证精度,积累的研制经验不足.H型轴承的圆柱和止推板易于加工,承旋能力强,轴向和径向可通过调整轴承间隙来实现相等的气膜刚度.
平面圆柱型又有通孔式和分裂式两种结构.分裂式在组合精加工后,需要分解重新装配,其同轴度不如通孔式装配的精度高,但在体积、质量和结构尺寸都严格限制的约束条件下,采用外转子结构的分裂式轴承可产生较大的角动量,保证陀螺有较好的精度,这也是陀螺渴望获得的结果之一.
1.2 H型动压气浮轴承的基本原理[1]
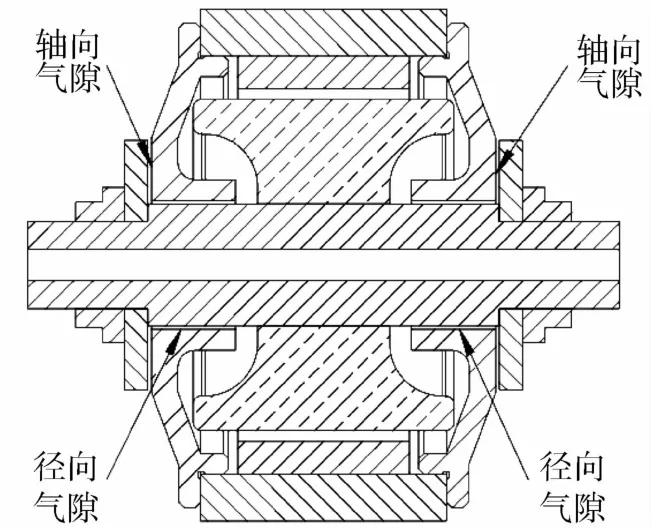
图1 H型动压气浮轴承陀螺电机的结构示意图Fig.1 Structure of“H”type hydrodynamic air bearing drive
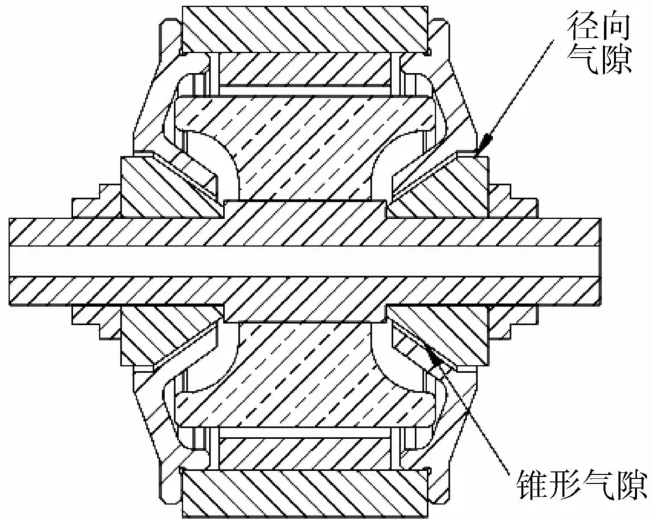
图2 圆锥型动压气浮轴承陀螺电机的结构示意图Fig.2 Structure of conical hydrodynamic air bearing drive
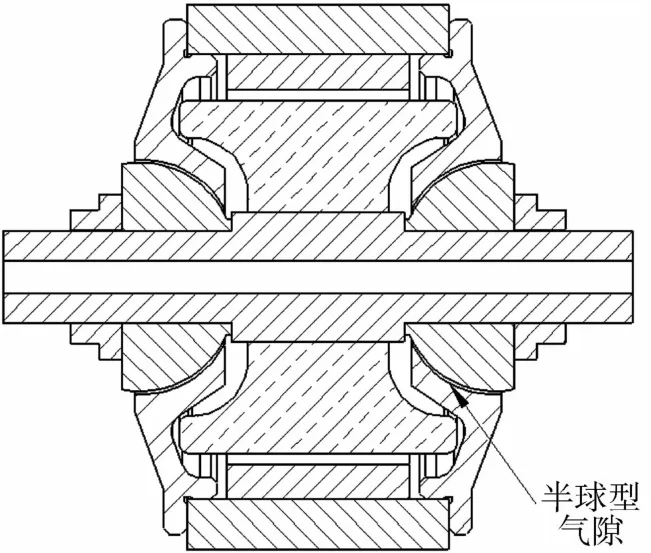
图3 半球型动压气浮轴承陀螺电机的结构示意图Fig.3 Structure of sphere hydrodynamic air bearing drive
目前,国内在动压气浮轴承的研制方面比较成熟的还是分裂式轴承结构,在其加工和装配技术方面已积累了丰富的经验,因此,卫星用动压气浮轴承首先采用了平面圆柱型的分裂式轴承结构,简称H型轴承结构,它是由圆柱形轴颈轴承与平板形止推轴承构成的组合轴承.下面分别介绍其工作原理.
轴颈轴承工作原理:轴颈轴承由整体圆柱形轴颈、与之相配合的圆筒形轴承和轴承转动时形成收敛间隙的两工作表面组成.由于气体的粘性作用和摩擦,当转子转动时,会带动气体进入间隙并一起运动.在偏心力的作用下,当运动的气体介质在趋近图4中A点时,间隙最小,形成图示的楔形气膜.气体被压缩形成相应的高压区.该气膜托起转子,将轴颈和轴承的工作表面完全隔开,形成了无接触的动压气浮支承气膜的轴颈轴承.
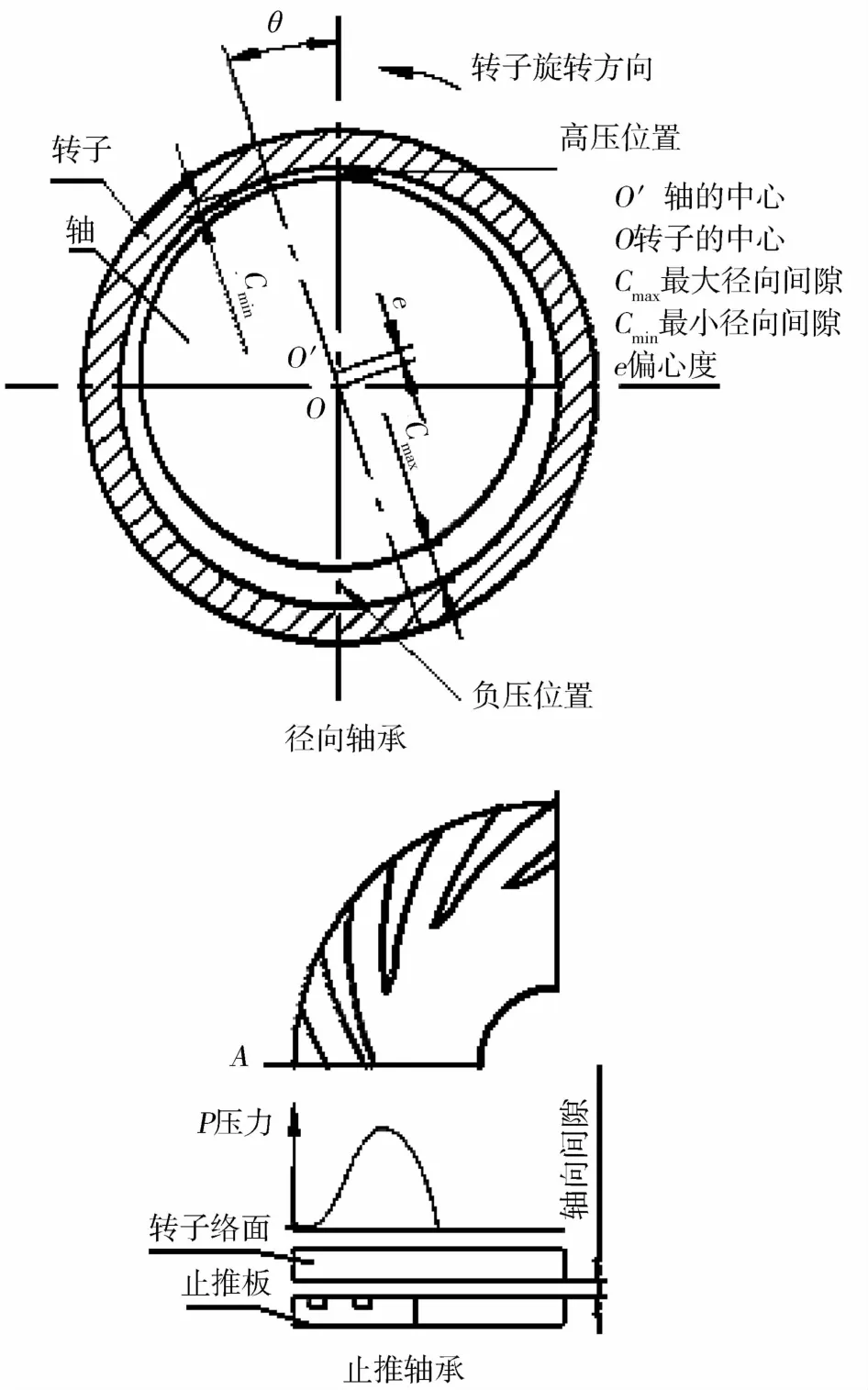
图4 动压气体轴承的结构原理示意图Fig.4 Principle of hydrodynamic air bearing
止推轴承工作原理:止推轴承由转动的止推面和不动的螺旋槽止推板组成.当止推面板转动时,由于气体的粘滞作用和摩擦,带动气体一起转动.气流沿着螺旋槽中心方向泵进(泵进型螺旋槽).当气流受到未开槽封闭区的阻挡时,出现压力升高,并在有槽区和封闭区交界处压力达到最大值.同时,在每个槽台之间,还存在阶梯效应,即在开槽区沿周向,压力成锯齿形分布.这种泵进效应和阶梯效应,共同产生止推承载能力.另外,对于封闭线轴型轴承,还为轴颈轴承环境压力提供增压效果.
由上述工作原理可知,动压气浮轴承在非失重状态下启动时,会产生一定程度的摩擦和磨损,所以通常认为用动压气浮轴承为支承的陀螺寿命决定于陀螺电机的启停次数,并且以其启停次数来表征陀螺的寿命.
2 不同安装姿态下的启动特性分析
从目前卫星用陀螺仪的使用情况来看,其经典的配置形式主要有两种:一种为3+1S,另一种为3S +3S.其中3+1S即3个陀螺的输入轴两两互相垂直(即三正交),1S就是外加一个斜装陀螺,以提高系统的可靠性.该方案是灵活度极高的一次冗余设计.另外一种3S+3S即6个单自由度陀螺均匀分布于圆锥体锥面上,任意3个输入轴均不共面,底面投影均布.在目前卫星型号的陀螺配置方式中,3S+3S占据了较大多数.
按以上应用情况,动压气浮陀螺支承一般工作在倾斜状态.在进行地面测试时,由于重力作用,动压气浮轴承的止推轴承和轴径轴承部分都受到摩擦力矩的作用,这直接关系到陀螺电机的可靠启动.
2.1气浮轴承在地面重力作用下的启动特性分析
一个动压气浮轴承一般由轴颈轴承和止推轴承组成.轴颈轴承的承载负荷垂直于轴承的转轴,止推轴承的负荷平行于转轴.由于气浮轴承的结构特点,当支承轴的方向发生变化时,轴承的工作表面将会产生不同的接触情况,但不管轴承工作表面是何种接触情况,其摩擦力矩的分析方法基本相同.下面讨论最一般的情况,即支承轴处于倾斜方位,如图5所示.支承轴的姿态对电机启动特性的影响主要包括两个方面,一是静摩擦力矩;二是转子浮起时间.
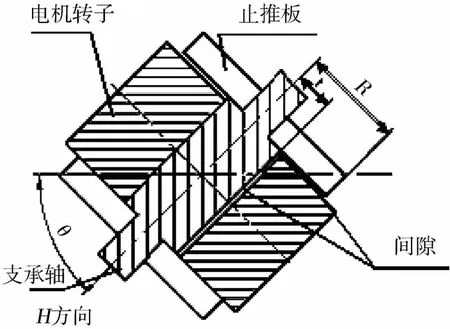
图5 支承轴倾斜Fig.5 Oblique bearing
(1)静摩擦力矩
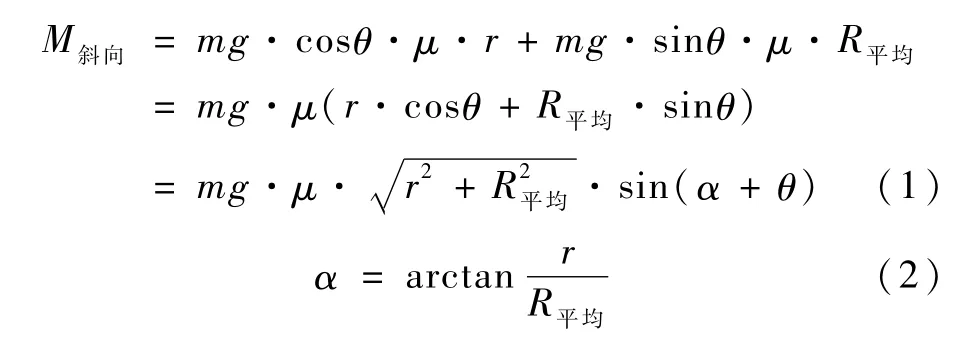
设定支承轴与水平面的夹角为 θ,支承轴内径为r,外径为R,电机转子质量为m,垂直状态下的平均半径为 R平均,摩擦系数为 μ(假设摩擦系数相同).由古典摩擦定律可知,绕气浮轴承支承轴的摩擦力矩为:根据公式(2)可知0°< α<45°,因此支承轴在倾斜角度θ=90°-α时,摩擦力矩为最大值,即
由于
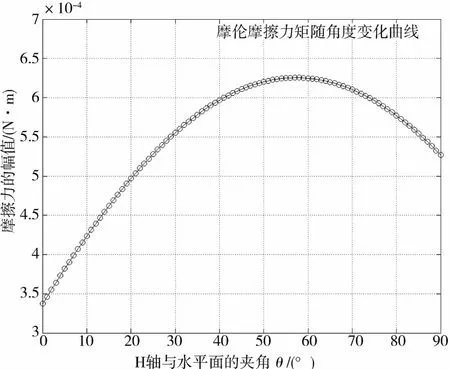
图6 支承轴在不同姿态下的摩擦力矩计算结果Fig.6 Friction moment of bearing in different attitudes
由式(1)即可得出支承轴在各种姿态下的静摩擦力矩公式,给出两种星上常见的支承轴姿态:
当支承轴水平放置,即θ=0°时,则

当支承轴垂直放置,即θ=90°时,则

(2)转子浮起时间
分析电机的启动机理,引起转子浮起时间加长主要是由于初始角加速度减小.电机通电后转动瞬间,忽略风阻力矩的影响,电机转子的受力应符:

式中,J为电机转子转动惯量;ε为转子角加速度;假设ω1为初始角速度;ω2为浮起角速度;则 ε=(ω2-ω1)/Δt.
由此可得:

由式(6)可知,启动时(此时 ω1=0)摩擦力矩越大,则转子浮起所需时间越长.而浮起时间越长,则增加对轴承表面的磨损.
2.2 气浮轴承在空间非重力作用下的启动特性分析
卫星正常工作时,轨道高度不同,重力场对其作用稍有差别,但相对地面工作状态所受重力基本可以忽略.
如果重力消失,转子端面与止推板之间以及转子内孔与电机轴之间的正压力消失,摩擦力矩也即随之消失,启动时所需克服的唯一的阻力矩消失,因此在失重条件下动压气浮电机更易启动.
3 试验验证
为了验证以上的理论分析结果,随机选择了11套动压气浮轴承陀螺仪产品,在反力矩测试仪上进行了实际测试,测试结果如表1所示.可见倾斜安装时,动压气体轴承的摩擦力矩增大,与分析结果基本一致.
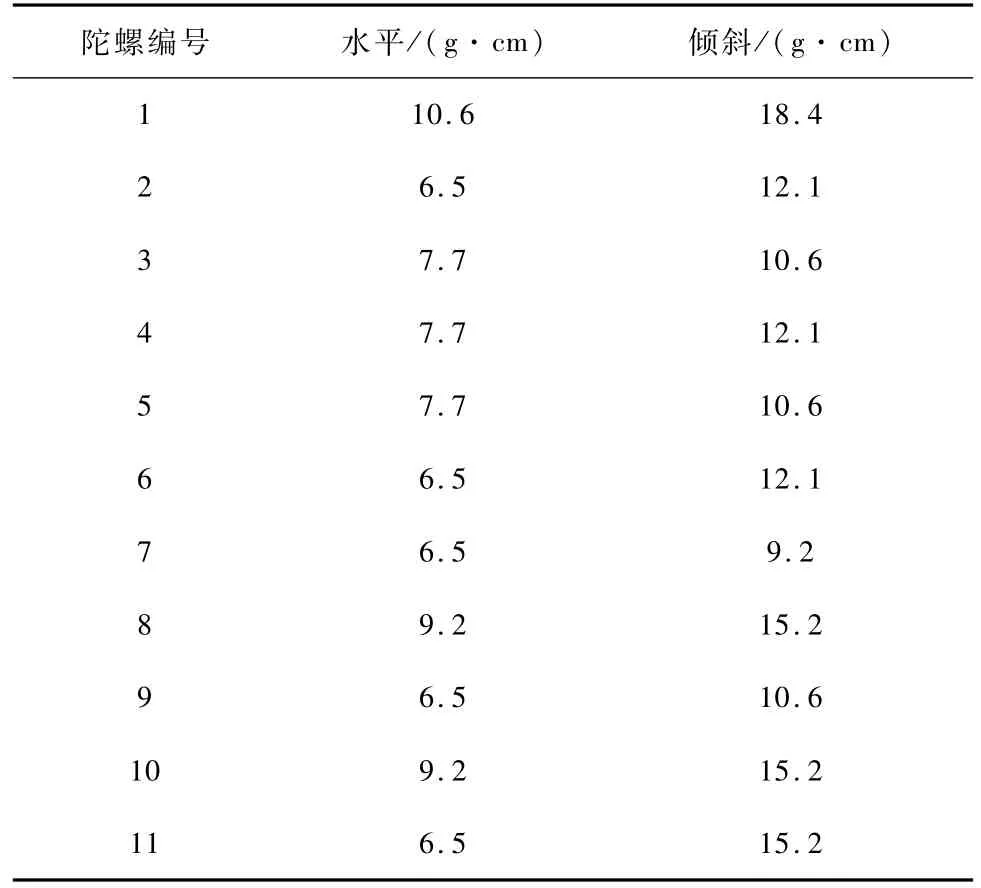
表1 支承轴倾斜和水平时静摩擦力矩比对表Tab.1 Contrast of friction moment between oblique bearing and horizontal bearing
4 研究结果与启示
从以上“H”型动压气浮轴承启动特性的分析研究,可以得出以下结果与启示:
1)气浮轴承的支承轴处于不同方位时,其轴承静摩擦力矩具有不同值.其大致符合M斜向max>M垂直>M水平的规律.由于支承轴在不同安装姿态角下具有不同的静摩擦力矩,从而电机的启动时间在支承轴处于不同安装姿态时也有一定的差异.静摩擦力矩越大,相应的启动时间也就越长.为提供足够的驱动力矩,保证电机在任何情况下可靠有效启动,常采用足够变频启动或变压启动切换时间的方法,来保证电机可靠有效启动;
2)由式(1)可知,动压气浮轴承的静摩擦力矩受转子质量、接触摩擦系数、支承轴所处方位以及工作表面接触状态等多种因素影响,且很多因素的影响具有随机性,所以气浮轴承的静摩擦力矩也具有随机性,因此,开展气浮轴承摩擦力矩测试方法和分布规律的研究具有重要意义;
3)摩擦和磨损是气浮轴承固有特性,特别是在重力作用下启动时其摩擦磨损更为突出.摩擦磨损会造成大量的磨屑堆积,从而影响气浮轴承的启动性能和工作性能,严重时更可能造成轴承无法正常启动.因此开展气浮轴承工作表面润滑的研究——如表面改性,良好的自润滑措施是减少摩擦磨损的有效途径;
4)设计航天器用动压气浮轴承时,还要充分考虑支承轴的安装姿态以及轴承在发射段的承载能力,避免轴承磨损甚至出现无法正常启动现象.
参 考 文 献
[1] 陆元九主编.液浮弹道导弹与运载火箭系列,惯性器件,导弹与航天丛书[M].北京:中国宇航出版社,1990 Lu Y J.Inertial parts of an apparatus,liquid-floated trajectory missile and launcher series,guided missile and spaceflight series[M].Beijing:China Astronautic Publishing House,1990
作者简介:孙 丽(1973—),女,高级工程师,研究方向为惯性敏感器;张 俊(1971—),男,高级工程师,研究方向为陀螺电机.
LC串联谐振磁复位的正激变换器运行特征图
孙定浩,叶东东,张 扬
(北京控制工程研究所,北京100190)
摘 要:根据本文的解析结果,在 T/为横轴、D为纵轴的平面中,将LC串联谐振磁复位正激变换器(无磁复位绕组)的运行特征,用两个参量的等值线族全面表示出来.这组等值线族图使设计者能根据设计参数T、L、C和D的值,全面直观预期运行的特征,也可根据预定的运行特征和D值设计T、L、C值,具有重要的理论意义和实用价值.
关键词:正激变换器;相平面分析
中图分类号:TU375.4文献标识码:A文章编号:1674-1579(2012)05-0057-06
DO I:10.3969/j.issn.1674-1579.2012.05.011
Operating Characteristic Figure of an LC Series Resonance M agnetic Recovery-Based Forward Converter
SUN Dinghao,YE Dongdong,ZHANG Yang
(Beijing Institute of Control Engineering,Beijing100190,China)
Abstract:According to the analytic results of the paper,the operating characters of the forward converter based on LC series resonance magnetic recycle(without magnetic recycle winding)are totally and perfectly showed with both of fam ily of the equivalent curves of the parametersin the plane of takingas horizontal axis and D as vertical axis.The figure has importantly theoretic significance and practical value,because it can make the designer estimate intuitively the operating characters according to the values of the parameters T,L,C and D,and can be used to determine the values of the parameters T,L,C and D based on the operating characters requested beforehand.
Keywords:forward converter;phase plane analysis
文献[1]以两种与传统不同的电路模型在相平面中分析了两类正激变换器.现以此为基础,全面解析LC串联谐振磁复位的正激变换器.
为便于叙述,先列出文献[1]中有关的解析结果.接着示出一幅以为运行周期,L为变压器初级绕组电感量,C为开关管并联等效电容量)为横坐标,D(占空比)为纵坐标的平面中,由两组等值线族组成的曲线图,其中一组为等值线族,另一组为Vm/E(开关管最高运行电压与电源电压的比值)等值线族.它们将这个平面分成许多小的区间.这一幅等值曲线图全面、直观显示了这类正激变换器的运行特征,具有重要的理论意义和实用价值.最后叙述绘制这两组等值线族的理论依据.
1 正激变换器的有关解析结果
图1(a)示出LC串联谐振磁复位的正激变换器的电路拓扑.文献[1]给出图1(b)所示开环相迹(指从任意起点P0开始)的解析结果如下:
(a)开关K导通(Ton)阶段

其中im(0)为Ton起始t=0时im的值.
(b)开关K断开(Toff)阶段
收稿日期:2011-10-17
在相平面中V≥E区间的相迹方程为
从EF直线上任一点到达EP2′直线上的时间为

从P2′点开始经过时间t到达的相点坐标为
P3的坐标为
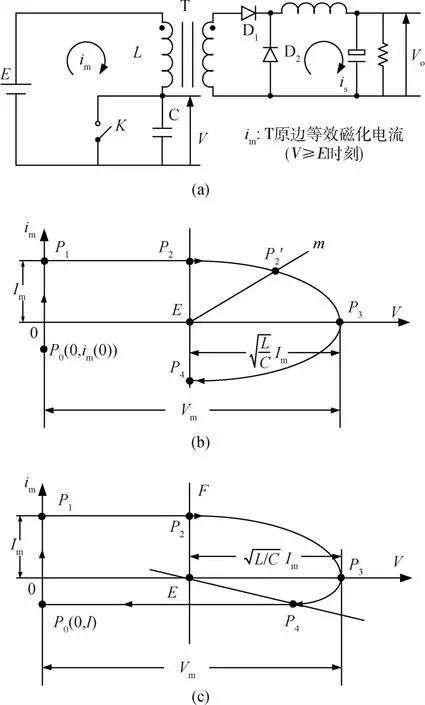
图1 正激变换器有关相迹图Fig.1 Phase plane plots of forward Converter
文献[1]也给出图1(c)闭环相迹的解析结果如下:
现将正激变换器的运行特征概括为两个参量:其一是运行过程中开关K两端的最高电压与电源电压的比值Vm/E,这是设计者最关注的值;另一是值,由它可判定磁芯的工况(单向磁化、非对称磁化、对称磁化),也十分重要.
图2中s1s2s3s4s曲线是等值线,d1d2d3d4d曲线是等值线.这两根曲线将此平面分成3个区间,π/2等值线的左侧为单向磁化区.变换器在此区间运行时,变压器磁芯处于单向磁化工况,Im>ETon/L.而Toff=π/2等值线与π等值线之间的区间为非对称磁化区,其一个方向的磁化电流由式(7)给定,另一方向的磁化电流由式(8)给定.闭环相迹如图1(c)所示.π等值线的右侧为对称磁化区,其中磁化电流幅值由式(10)给定.闭环相迹如图3(b)所示.
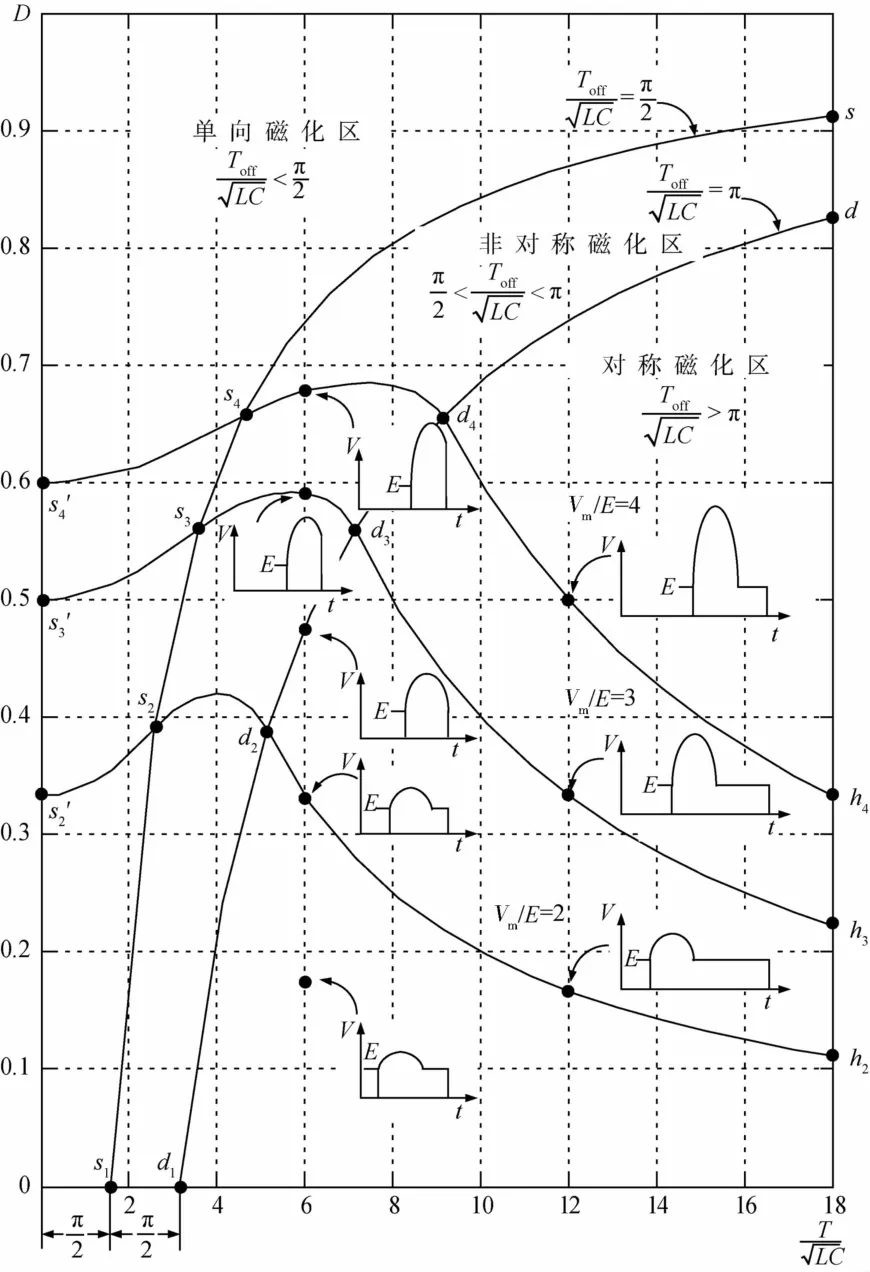
图2 Fig.2 Operating characteristic figure of a LC series resonance magnetic recovery-based forward converter in the planeo和时的闭环相迹图
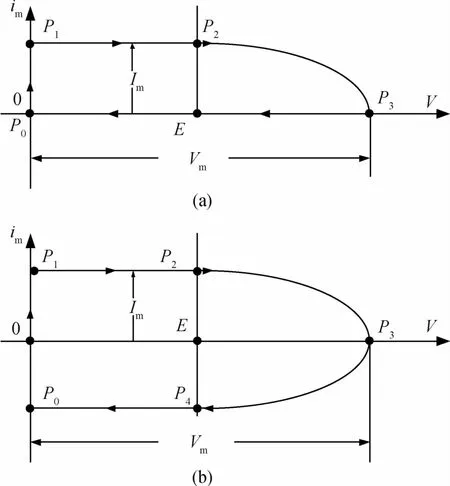
图3 Fig.3 Closed loop phase plane plot foand
设想设计一个E值变化范围不大的正激变换器,要求Vm/E约等于2,问如何选择比值能得到大的D值.由图2的s2′s2d2h2曲线可知,若则最大 D值仅约为 0.165;若则最大D值约为0.37;若4,则最大D值可达0.42,但磁芯处于非对称磁化,Ton开始时刻V值较高,开关K导通起始损耗大.综合考虑约 5.2为宜,此时D最大值约0.39.
若设计一个这类变换器,其电源电压在E~E/2之间变化,要求运行中 Vm/E≤2,问如何选定值应取在d2点附近,即值可使D最大化.电源电压为E/2时,满足Vm/E≤2的曲线是当电源电压为E时满足Vm/E≤2的曲线是因此现在的问题可转述为在曲线上寻找一点,其D值的一半正落在s2d2h2曲线上.直接从这两曲线上搜索可知是合适的.E/2时的D值约0.677.
若有一个这类变换器产品,运行在非对称磁化状态,问怎样改为对称磁化状态.由图2可知,对称磁化区在非对称磁化区右侧,增大即可,最简单的方法是降低运行频率.由于一个现成产品改变频率时D值不变,故可在图2平面中从当前工作点作一平行于横轴的平行线,从这点至线的距离,即为当前值的最小值.
以下说明绘制这两组等值线族的理论依据.
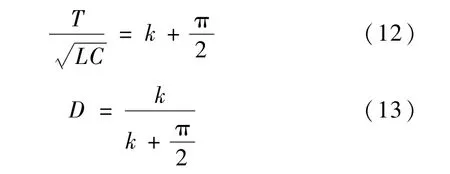

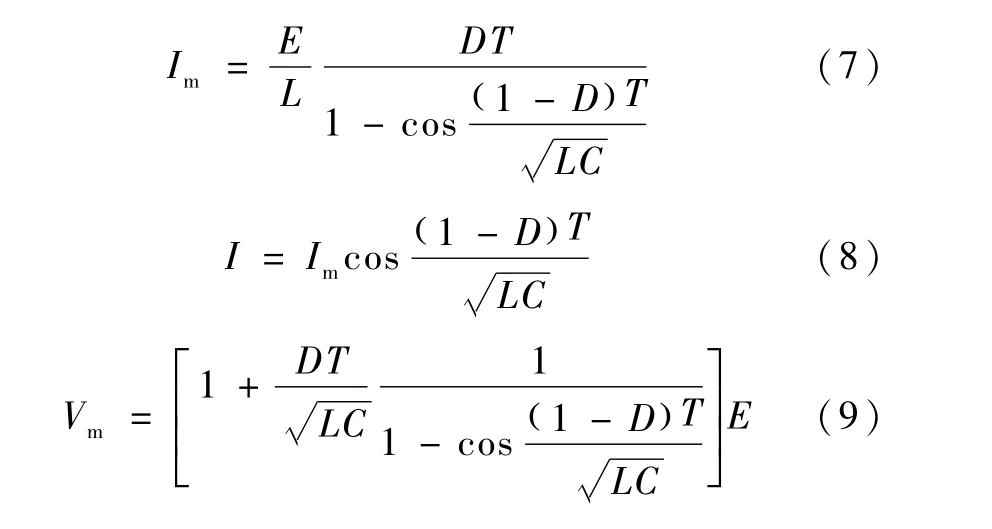
这个状态下的Vm值已由式(11)给定,将k代入其中得

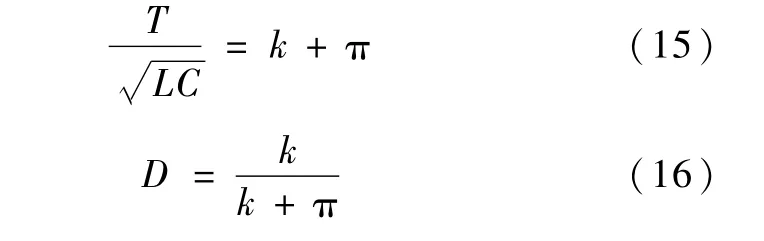
4 对称磁化区中Vm/E等值线族

则有
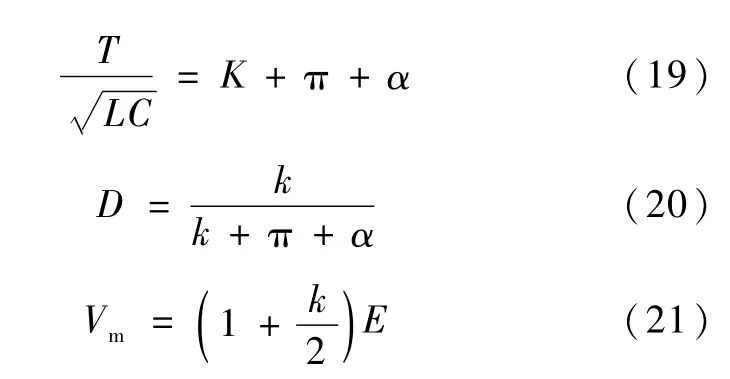
分别令k=2,4,6,将式(19)中π+α当作一个参数(≥π),则由式(19)和(20)得到Vm/E分别为2,3,4的等值线族.
5 非对称磁化区的Vm/E等值线族

代入式(9)得

非对称磁化区内V~t波形的特征是Ton开始时刻V/E>1.将式(7)以及Toff=(1-D)T代入式(5)中的t得Ton开始时刻V/E值为
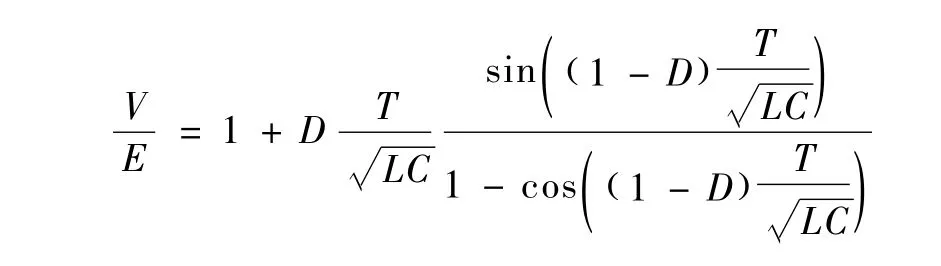
表1 n=2,3,4时的 T/和D值Tab.1 Values ofT/and D for n=2,3,4
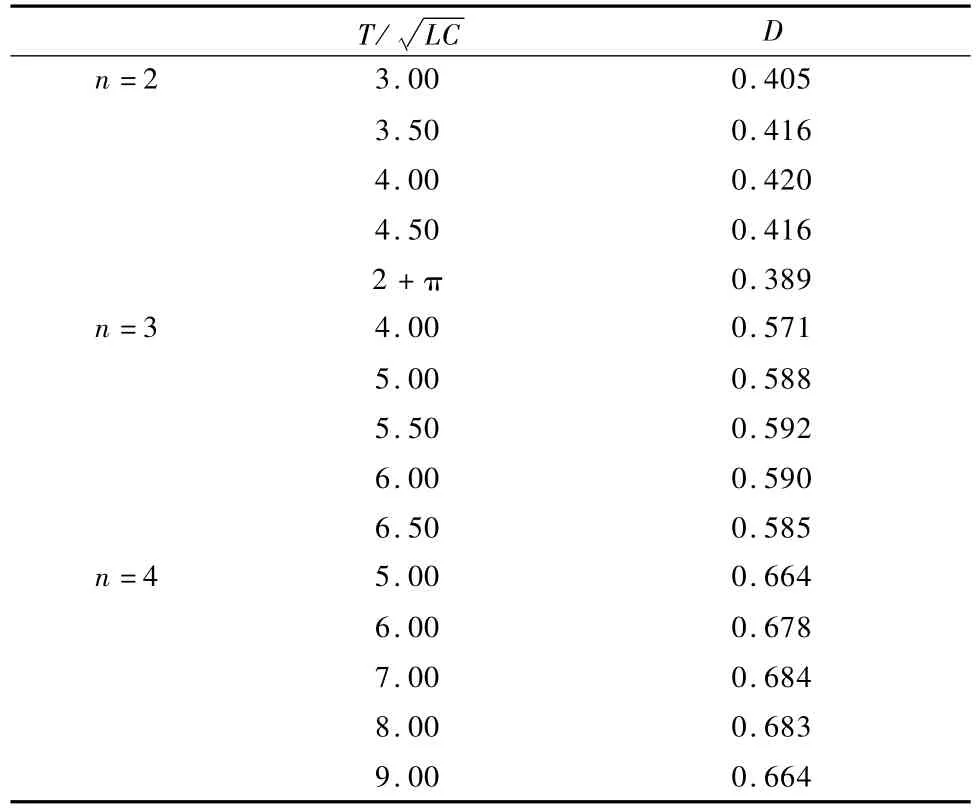
表1 n=2,3,4时的 T/和D值Tab.1 Values ofT/and D for n=2,3,4
T/LCD n=2 3.00 0.405 3.50 0.416 4.00 0.420 4.50 0.416 2+π■0.389 n=3 4.00 0.571 5.00 0.588 5.50 0.592 6.00 0.590 6.50 0.585 n=4 5.00 0.664 6.00 0.678 7.00 0.684 8.00 0.683 9.00 0.664
6 单向磁化区Vm/E等值线
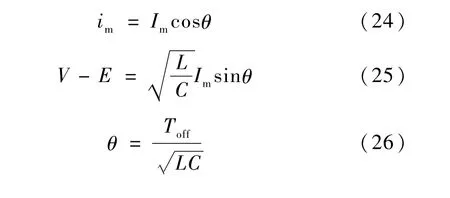
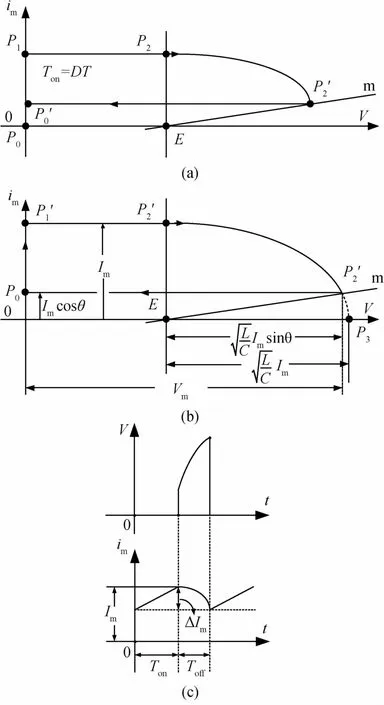
图4时的闭环相迹图Fig.4 Closed loop phase plane p lot fo

代入式(25)得

根据闭环必须满足Ton阶段im的增量等于Toff阶段im的下降量,由此得方程

可改写成

将式(28)代入式(30)得

由式(31)和式(26)得
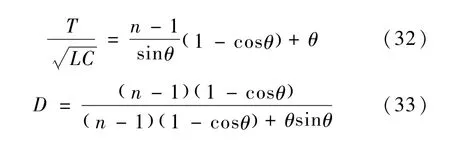
式(32)和(33)即单向磁化区内Vm/E=n等值线的参数方程.
令n=2,取θ作为参数,由式(32)和(33)得表2(a)所列数据,在图2平面中绘成Vm/E=2的等值线s2′s2.同理令n=3、4,得到表2(b)和2(c)数据,绘成Vm/E=3、4的等值线s3′s3和s4′s4.
表2 n=2,3,4时的 T和DTab.2 Values ofTand D for n=2,3,4
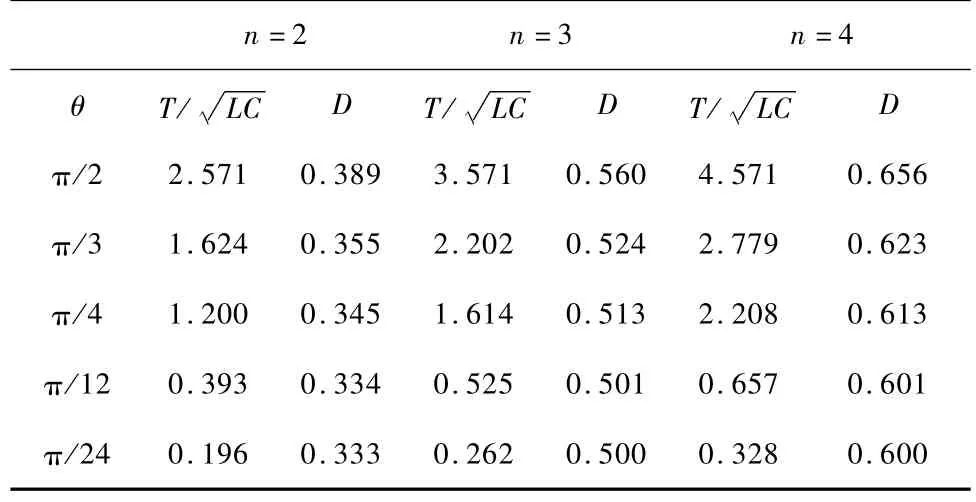
表2 n=2,3,4时的 T和DTab.2 Values ofTand D for n=2,3,4
=4 θ■n=2 n=3 n T/LC D ■T/LC D ■T/LCD π/2 2.571 0.389 3.571 0.560 4.571 0.656 π/3 1.624 0.355 2.202 0.524 2.779 0.623 π/4 1.200 0.345 1.614 0.513 2.208 0.613 π/12 0.393 0.334 0.525 0.501 0.657 0.601 π/24 0.196 0.333 0.262 0.500 0.328 0.600
7 单向磁化区磁化电流的“发散系数”
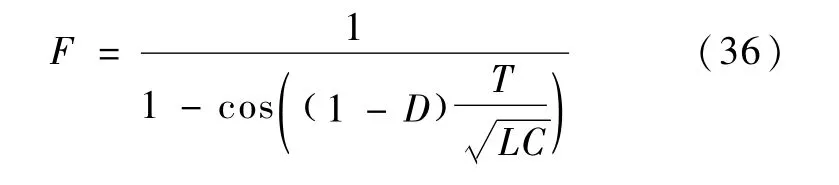
由图4(b)或(c)可见,单向磁化区内Im值大于Ton阶段im的增量EToff/L(用符号ΔIm表示).我们称Im/ΔIm为“发散系数”,用F表示.由式(29)知

由式(26)知

代入式(34)得
8 试 验
实际开发了用LC串联谐振实现磁复位的正激变换器,并通过改变电源电压值和开关管并联等效
电容值等方法,使其分别工作在对称磁化区、非对称磁化区和单向磁化区,最后得到了正激变换器在这3个区域工作时开关管D-S两端的电压波形,如图5所示,具体分析如下.
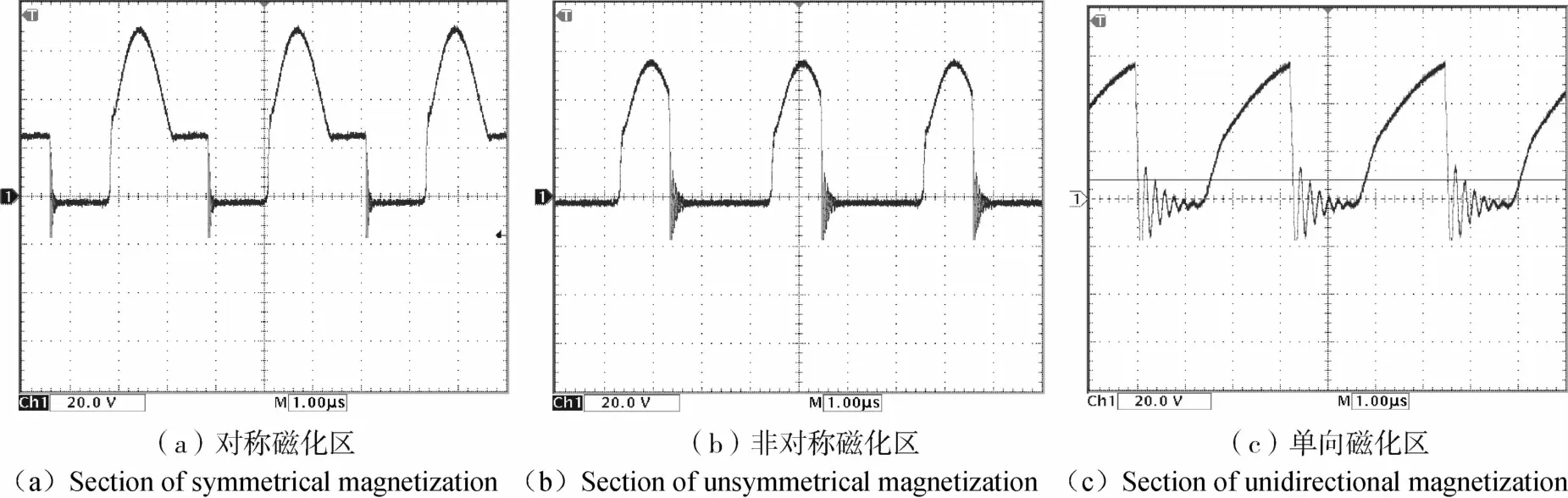
图5 3个区域工作时开关管D-S两端的电压波形Fig.5 Voltage waveform between D and S ends of switch in three areas
对称磁化区:变压器初级绕组电感 L约为159μH,并联电容C约为1600pF,正激变换器运行周期T约为3.26μs,稳态运行占空比D约为35%,电源电压E约为27.97V,则

这与图6所示的结果一致.
非对称磁化区:变压器初级绕组电感 L约为159μH,并联电容C约为1900pF,正激变换器运行周期T约为3.20μs,稳态运行占空比D约为60%,电源电压E约为15.93V,则
这与图6所示的结果一致.
单向磁化区:变压器初级绕组电感 L约为159μH,并联电容C约为21600pF,正激变换器运行周期T约为3.26μs,稳态运行占空比约为40%,电源电压E约为22.85V,则

也与图6所示的结果一致.从图5(c)还可以看出,正激变换器工作在单向磁化区时,可以保持稳定的运行状态.
[1] 孙定浩,张扬,叶东东.新建正激变换器运行理论[J].空间控制技术与应用,2011,37(3):21-27 Sun D H,Zhang Y,Ye D D.Newly estabilished operational theory of forwad Converters[J].Aerospace Control and Application,2011,37(3):21-27
Starting Characteristics of Gyro-Used“H”Type Hyd rodynam ic Air Bearing
SUN Li1,ZHANG Jun2
(1.Beijing Institute of Control Engineering,Beijing 100190,China; 2.Tianjin Navigation Instruments Research Institute,Tianjin 300131,China)
To meet requirement of longevity forman-made satellite,a“H”type hydrodynam ic air bearing is used in gyroscopes.The deep going cognition is got in the application process.The fundamental structure and principle of hydrodynamic air bearing are simp ly presented in this paper.Starting characteristics of“H”type hydrodynamic air bearing are analyzed at different attitudes in detail and ends of the paper gives some results and valuable suggestions.
hydrodynamic air bearing;starting characteristic;fundamental structure
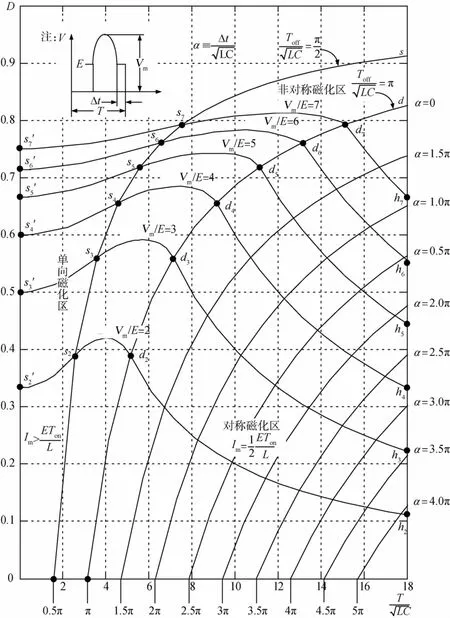
图6 基于LC串联谐振磁复位的正激变换器运行特征图Fig.6 Operating characteristic figure of a LC series resonance magnetic recovery-based forward converter
V241.5
A
1674-1579(2012)05-0053-04
孙定浩(1934—),男,高级工程师,研究方向为电功率变换技术;叶东东(1978—),男,博士,研究方向为功率电子技术;张 扬(1959—),男,高级工程师,研究方向为功率电子技术.
2011-08-11
DO I:10.3969/j.issn.1674-1579.2012.05.010
猜你喜欢
波谱学杂志(2022年2期)2022-06-14
农业工程学报(2022年1期)2022-03-25
核科学与工程(2021年4期)2022-01-12
矿山测量(2020年6期)2021-01-07
水运工程(2020年7期)2020-07-27
物探与化探(2020年2期)2020-04-22
表面工程与再制造(2019年3期)2019-09-18
新农业(2018年3期)2018-07-08
新农业(2018年3期)2018-07-08
爆炸与冲击(2016年2期)2016-04-20