
基于F2806平台无刷直流电机驱动器设计
2012-08-28 06:50李军科杨国华吴建军
电机与控制应用 2012年10期
李军科, 杨国华, 吴建军
(1.江苏省无线传感系统应用工程技术开发中心,江苏无锡 214153;
2.无锡商业职业技术学院电子工程学院,江苏无锡 214153)
0 引言
无刷直流电机采用电子换向原理,调速性能好、起动转矩大、维护方便,在医疗仪器、机床工业、纺织工业、汽车等领域得到了广泛应用。数字信号处理器(DSP)作为实时处理的高速度、高精度CPU,相对单片机可完成更加复杂算法的电机控制,DSP与无刷电机相结合是目前无刷直流电机(Brushless DC Motor,BLDCM)数字控制的热点[1]。
TMS320F2806芯片作为美国 TI公司的TMS320C2000TM系列产品,以高集成、高性能优点为运动控制领域产品开发提供了良好平台。本文以TMS320F2806芯片(以下简称F2806)为主处理器,完成了BLDCM驱动器的外围电路设计与软件实现,并对样品性能进行了系统测试。感器、控制电路及逻辑开关换向装置。定子绕组所产生的磁场与转动中转子磁钢产生的永磁磁场,在空间始终保持90°电角度。这样就使得两个磁场产生最大平均转矩而驱动电机不停地旋转。如图1所示,目前在无刷电机控制领域,六管全桥逆变器应用最为广泛。对VTx(x=1,2…6)如何控制,以便获取最好的转矩与调速性能十分重要。
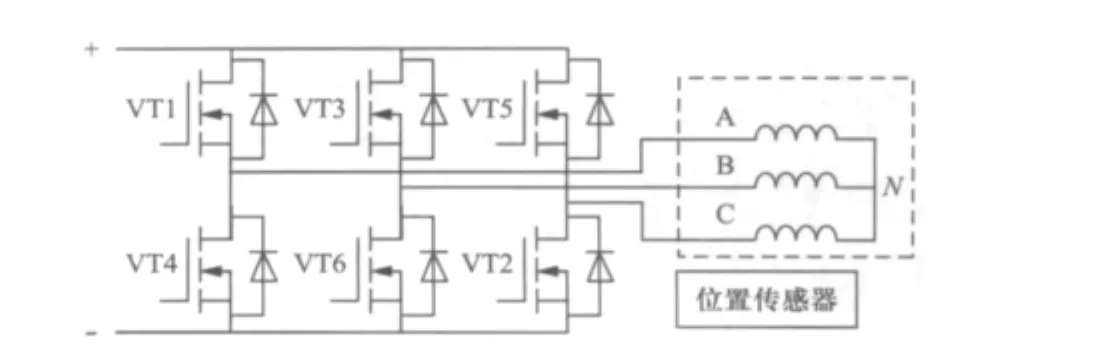
图1 三相星型BLDCM系统结构图
1 BLDCM原理及单斩PWM控制
BLDCM由定子与转子组成,同时包含位置传
如图2所示。采用常用的两两导通Y型连接,每个瞬间只有两个功率管VTx导通,每隔1/6周期换相一次,每次换相一个功率管,每个功率管导通120°电角度。各功率管的导通顺序VT6VT1—VT1VT2—VT2VT3—VT3VT4—VT4VT5—VT6VT1。例如,当功率管VT6VT1导通时,电流从VT1管流入A相绕组,再从B相绕组流出,经VT6管回到地。每次换相合成转矩方向大小不变,方向按电角度60°变化。假设正转按如上次序换相,反转则逆次序换相。

图2 两两导通Hpwm-Lon PWM方式
开关管控制采用PWM方式。不同的PWM方式对换相转矩脉动影响不同。必须选择合适的调制方式使换相转矩脉动最小。图2给出了单斩控制PWM波调制过程。分析证明,在给定相同的占空比及相同的母线电压下,单斩方式下绕组电流的稳态值要大于双斩方式下绕组电流的稳态值,并且双斩方式下功率开关动态功耗大,发热比较严重。本设计方案采用上桥 PWM,下桥恒通[2]。
2 系统硬件电路
控制器总体方案如图3所示。以F2806为主控芯片,包括电流采样与调理电路、逆变器功率驱动电路、过电流保护电路、PC机通信RS-232接口电路、光藕隔离电路、转速给定及系统电源电路。由于篇幅所限,只详细介绍主控芯片、功率驱动电路、电流检测及系统电源电路。
F2806处理器是基于TMS320C2xx内核的定点DSP,是集成度较高、性能较强的运动控制系列器件。F2806相比F2812提供了增强型外设模块ePWM、eCAP和eQEP。内核与I/O电压1.8 V与3.3 V。时钟频率经内部锁相环倍频后可达100 MHz。主要实现对电流与转速的调节与PWM逻辑输出[3]。
功率驱动电路如图4所示,逆变功率开关管采用IRF540N,其额定电压和额定电流分别达500 V和20 A,驱动芯片采用 IR公司生产的IR2103,该芯片输入HIN和输出HO同相,LIN与LO反向。这一点与IR2101不同,后者输入与输出都同相。最高能够驱动直流电压为600 V。输入端HIN、LIN具有施密特触发器,能够自动屏蔽小的扰动,防止误动作。在系统上电复位时,DSP的电机PWM控制模块要设置为通用IO口,HIN控制管脚设置低电平,LIN控制管脚接高电平。IRF540高电平导通。这样就可以确保在复位时不会出现桥臂直通烧坏MOS管。这里给出了A相半桥驱动电路。B相、C相驱动电路与A相相同。自举电容选择10 μf无极性电容。开关管并联快速恢复二极管US2D。0.22 Ω/2 W的两个电阻并联串接在直流母线与地之间完成电流采样。

图4 A相功率驱动电路

图3 BLDCM硬件总体方案图
过电流保护电路如图5所示。母线电流信号经采样电阻转换成电压信号输入“轨到轨”运放LMV324放大。其中一路经低通RC滤波器后输到F2806的AD口,另一路作为LM393比较器输入,当检测电流大于设定电流时,LM393输出高电平信号送IR2103接切断PWM波输出,以防意外事故发生。
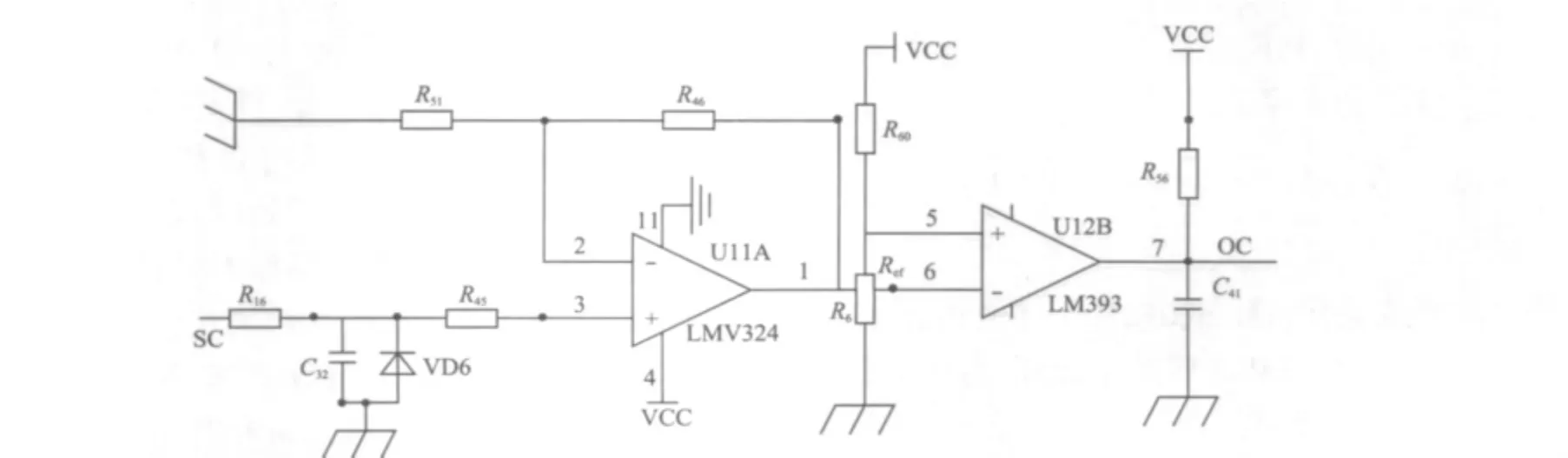
图5 过电流检测电路
系统电源电路见图6,UC3843是一种高性能固定频率电流型控制器,包含误差放大器、PWM发生器、PWM锁存器、振荡器、内部基准电源和欠压锁定等单元。开机时,24~50 V电压经电阻分压后向UC3843芯片7脚提供16 V起动电压,正常工作后,变压器输出12 V电压作为其工作电压。反馈电压与内部误差放大器同向输入端基准电压比较,作电压反馈控制。在开关管源极串接小阻值电阻电流采样,作电流反馈控制。4脚时钟振荡器接定时电阻与定时电容。T1是高频开关电源变压器。12 V电压输出提供IR2103工作电压,经由7805芯片输出5 V电压。TI专用电源芯片TPS767HD318接受5 V输入,并输出两路1.8 V/3.3 V供F2806内核和外设单元。
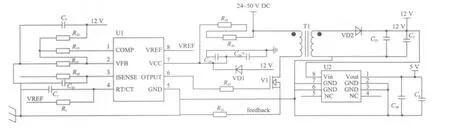
图6 系统电源电路
3 电机换相、转速PID调节
3.1 换相与转速计算
转子位置信号是通过三个霍尔传感器得到的,每一个霍尔传感器都能够产生180°脉宽的输出信号。并且输出信号互差120°相位角。这样它们在每个机械转中共有6个上升或者下降沿,分别对应着6个换相时刻。将F2806的eCAP单元设置为双沿触发捕捉中断功能。在每个中断捕获程序内设置CAP1~CAP3为I/O输入口,并检查它们的电平状态,由此修改ePWM1~ePWM3单元AQCSFRC、AQCTLA/B寄存器,实现开关管控制信号输出。在捕获中断程序中,执行换相后重新设置CAP1~CAP3捕获状态,等待下一次换相操作[4]。
3.2 转速PID调节
电机转速采用经典PID控制。假设r(t)是给定值,y(t)是系统的实际输出值,给定值与实际输出值构成控制偏差e(t),e(t)作为PID控制器
同时,转子位置信号还用于检测电机转速。选择定时器0对两次换相时间间隔频率计数。在每次捕获中断中,首先把计数器的值保存在速度参数变量区,并与上次计数器的值相差,就能得到两次换相的时间间隔。每次换相对应60°转子电角度变化。在捕获中断程序结束时对定时器先关后开,计数清零,进行下次换相测量。电机转速n、极对数p、定时器计数值T、计数频率f四者之间关系可用式(1)计算[5]:的输入,u(t)作为PID控制器的输出和被控对象的输入。模拟PID写成式(2):


本系统采用TMS320F2806对电机转速作数字控制,需对模拟PID离散化处理,得到离散PID公式,如式(3)所示:

式中:Kp,Ki,Kd分别称之为PID控制器的比例、积分、微分系数。
为了计算方便,对式(3)变化形式,只计算控制量的增量Δu,可以使用增量式PID控制算法,如式(4)所示:

可以看出,如果PID参数确定,只要用前后3次测量值的偏差,就可以由式(4)求出控制增量。结合上一次输出Uk-1,可以计算当前PID输出Uk。
在实际控制电机转速时,通过积分限幅和输出限幅,可有效减小超调。为了使控制系统能够稳定,当速度采样误差小于某设定阀值时,就可以认为当前次误差为零,这样可以避免一些小的扰动引起的系统振荡。PID转速调节在电流采样中断程序中完成。考虑到母线电压、电流脉动,程序中对电流、电压采样数值作多次平均计算。同时,在程序中设计PID调节计数变量,以250 ms为转速调节时间单位。PID输出分别更新ePWM1、ePWM2、ePWM3 单元 CMPA.half.CMPA、CMPB比较寄存器[6]。
4 BLDCM软件实现
本文项目程序在CCS2.2版本下完成。CCS代码设计工作室是TI公司推出的集成可视化DSP软件开发工具。无刷直流驱动软件主要包含三个功能模块:主程序、捕获中断程序、adc采样中断程序。
主程序主要完成变量与参数的初始化设置。数据类型由 int、unsigned int、float组成,整个程序执行浮点计算。分别定义hall信号状态、电机转向、直流母线电压、电流、PWM占空比、转速为基本变量。采用比例积分 PI调节,令微分系数Kd=0。Kp、Ki根据电机与负载环境采用“试凑法”方法确定。主程序开始阶段,在系统初始化函数中对时钟锁相寄存器作10倍频设置,确保主芯片在100 MHz工作。初始化eCAP1/2/3捕获引脚为GPIO输入。选择ADCINA0/1为直流母线电压与电流采样通道。单序列SEQ1顺序采样。采样中断触发起用ePWM周期匹配。ePWM1/2/3模块六路输出经光耦隔离后经IR2103驱动开关管,完成两管导通H_pwm-L_on调制。BLDCM起动时,占空比寄存器初始值设定为50%。eCAP、ePWM、ADC模块初始化后,开中断等待中断发生[7-8],如图7所示。
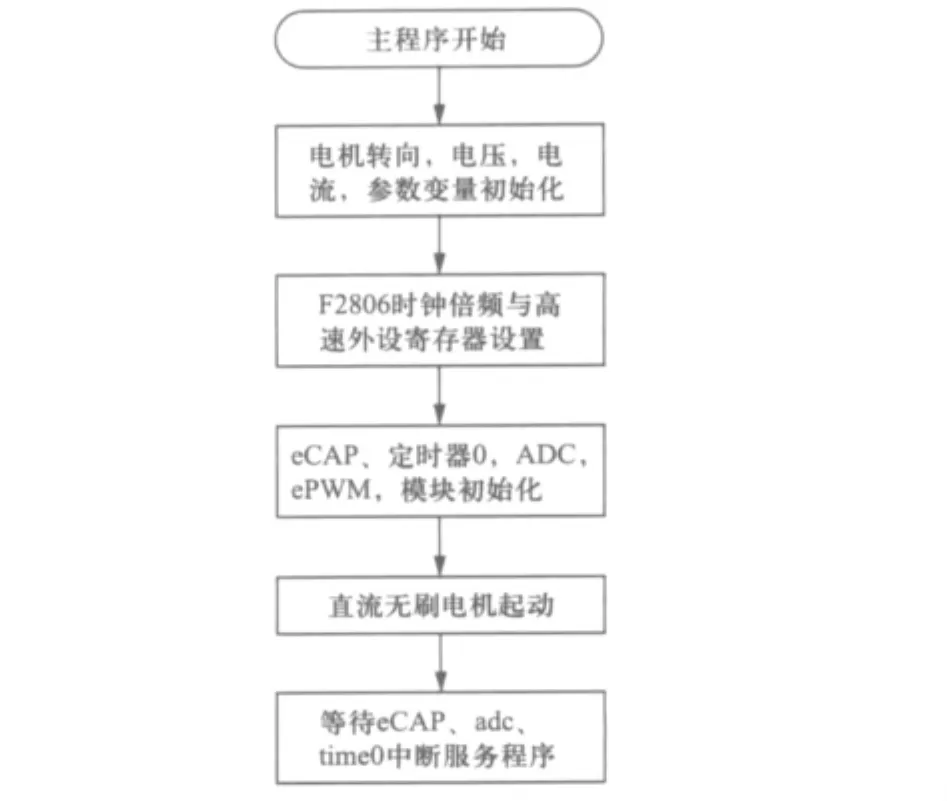
图7 BLDCM驱动主程序
捕获中断程序主要完成三路hall信号电平检测,并根据检测到状态与电机转向设定完成机械转6次换相。ePWM单元管脚输出有强制高、强制低、高有效及低有效四种不同情况。电机转速计算时,定义定时器0中断计数变量count为全局型。在捕获中断程序中读count值可以确定两次换相时间间隔,如图8所示。
采样中断程序主要完成母线电压与电流采样,本项目中只对转速进行PI调节。电流电压主要用于过/欠电压、过电流保护。对多次采样值作简单的数学平均完全可以实现项目设计要求。电机转速调节采用增量PID算法,调节过程中每次增量值限幅,减少调节过程中振荡现象,如图9所示。HO、LO信号波形。这两路波形完成A相上管与下管控制。上管PWM调制期间,下管保持截止状态。不存在死区控制。
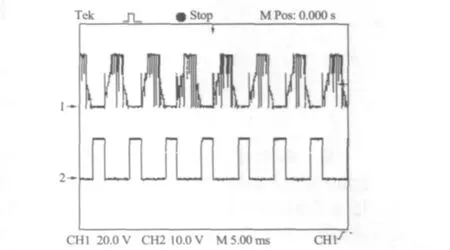
图11 A相上下桥开关管控制信号

图8 捕获中断程序
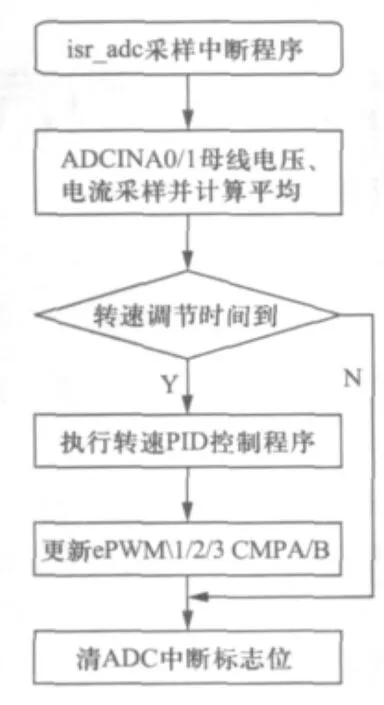
图9 采样中断程序
除此之外,系统通过F2806的SCI口完成了与上位机的RS-232通信。用户可以通过PC机实现电机的转速、过流保护值设定,同时也可以把所出现的故障反馈给上位机,供上位机参考及处理。
5 试验结果分析
在前面理论分析与实际系统设计基础上构建了试验系统。对F2806平台无刷直流系统进行调速性能测试。BLDCM型号选择57BL,极对数4,额定功率80 W,额定电压24 V,额定电流5 A,额定转速3 000 r/min。
图10是转速设定2 000 r/min时霍尔传感器两路波形输出。霍尔电路使用+5 V电源。霍尔信号周期 7 ms,两路时延 4.7 ms,相位差 120°。测试结果还表明,选择TDS1012B双通道示波器检测任意两路霍尔信号,都满足三相BLDCM霍尔信号相位角相差120°的设计要求。
图12给出了A相上管PWM调制与C相下管恒通的HO与LO输出波形。逻辑控制完全满足图2设计要求。两次换相时间间隔为1.16 ms,即60°电角度换相。选择下桥换相。

图12 两管导通H_pwm-L_on调制波形
图13给出了带载下A相电流“方波”波形。转速给定,加大负载,电流的方波特征更为明显。

图10 两路霍尔信号波形

图13 A相电流波形(带载)
图11给出了A相半桥芯片IR2103输出
6 结语
本文在F2806 DSP平台上设计了BLDCM的调速系统的硬件与软件,实现了电机的平稳运行。PI算法很好地改善了系统动态调速性能,但换相瞬间产生的转矩脉动问题需要增加系统分析。
[1]韩安太.DSP控制器原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2003.
[2]袁飞雄,黄声华.永磁无刷直流电机PWM调制方法研究[J].微电机,2004,37(5):42-44.
[3]王晓明,王玲.电动机的 DSP控制——TI公司DSP应用[M].北京:北京航空航天大学出版社,2004.
[4]韦鲲,林平.无刷直流电机PWM调制方式的优化研究[J].浙江大学学报,2005,39(7):1038-1042.
[5]李宁,汪木兰.无刷直流电机霍尔信号细分反馈方法的研究[J].电力电子技术,2006(10):68-69.
[6]MURPHREE J,BRZEZINSKI B.Using a fixed-point digital signal processor as a PID controller[J].American Society for Engineering Education,2002.
[7]韩莹,张安年,丁喆,等.基于DSP的无刷直流电机位置伺服系统设计研究[J].微电机,2006(9):64-66.
[8]任润柏,周荔丹,姚钢.TMS320F28x源码解读[M].北京:电子工业出版社,2010.
猜你喜欢
环球时报(2022-09-29)2022-09-29
军民两用技术与产品(2021年12期)2021-03-09
人大建设(2019年12期)2019-05-21
通信技术(2018年11期)2018-11-07
瞭望东方周刊(2017年42期)2017-12-05
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
环球时报(2017-03-30)2017-03-30
湖北工业大学学报(2016年5期)2016-02-27
中国卫生(2015年3期)2015-11-19
