
基于eCognition的面向对象农村公路提取
2012-08-27 06:47:10陈昌鸣熊增连吴亚坤
重庆交通大学学报(自然科学版) 2012年6期
何 勇,陈昌鸣,熊增连,吴亚坤
(1.重庆交通大学河海学院,重庆400074;2.重庆数字城市科技有限公司,重庆400020)
0 引言
随着遥感影像分辨率的不断提高,其中包含的信息量也在不断的增大。但是信息的提取速度远远跟不上影像获取的速度,为了获取准确的信息,大多数还是采用人工解译的方法进行提取。这种方法费时费力,并且受解译人员的专业知识影响较大。因此如何提高信息的提取速度和效率是遥感信息提取与分析领域最重要的研究方向。
道路提取是遥感影像信息提取中很重要的一部分,常用的方法有最小二乘模板匹配算法[1]、Snakes法[2]、LSB-Snakes 模型算法[3]、面向对象法[4]等。其中面向对象法与传统的面向像元的分析处理方法不同,它认为影像并非由单个像元来代表,而是由包含重要语义信息在内的影像对象以及他们之间的相互关系构成。影像对象是指影像分割后的“同质”的,连续的像元的集合[5]。由于对象比像元具有更丰富的意义,可以利用对象的光谱特征,空间纹理特征,形状大小特征等,对道路进行提取。
1 面向对象道路专题信息提取
面向对象法模拟人类大脑认知过程,将图像分割为不同均质的对象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取道路。面向对象法相对于传统的基于像元的分析方法,具有不可比拟的优势。它能有效解决高分辨率遥感影像的椒盐效应,在分割的时候就已经将噪声融合进对象之中。由于处理的是对象而不是单个的像元,因此能利用对象的纹理特征,拓扑特征,几何特征等信息,提高了提取的精度。
eCognition是全球第一个面向对象的影像分析软件,它模仿人类思维进行影像综合智能分析和信息提取,具有模糊逻辑分类、模型化、复杂语意分析及整合多源数据等功能。通过人机交互定义的分割尺度、颜色、形状等参数进行影像对象分割,以影像对象为基本空间单元进行地物目标提取,可应用于各种专题研究[6]。
笔者以“‘十二五’农村道路现状调查”为依托,选取重庆市长寿区东北部区域为实验区,采用2009年9月获取的CBERS 02B HR影像进行研究,影像空间分辨率为2.4 m(图1)。采用eCognition Developer 8.0软件进行实验,道路提取流程如图2。

图1 研究区影像Fig.1 Image of research area

图2 道路提取流程Fig.2 Flow of roads extraction
2 面向对象法提取农村道路
2.1 影像预处理
在对影像进行切割,几何校正后,为了增大地物反差,要对影像进行LUT拉伸,从而方便进行分割。
2.2 影像分割
影像分割是面向对象法的第一步,也是最关键的一步,分割质量的好坏直接影响到后期分析处理结果。在这里采用最常用的多尺度分割。多尺度分割采用异质性最小的区域合并算法,目的是实现分割后影像对象的权重异质性最小化,eCognition能进行任意分辨率的区域合并算法,从而满足不同尺度地物提取的需要,因此需要设置分割尺度参数来控制合并算法的阈限[7]。
农村公路宽度较小,分割尺度采用15比较合适,除分割尺度外,还需设置形状指数和紧凑度指数来保证分割结果不会太破碎。在清晰分割出道路的同时,要使背景对象与道路对象形状差异尽可能的大。经过多次尝试,最终将形状指数设为0.9,紧凑度指数设置为0.1。分割结果如图3。

图3 影像分割结果Fig.3 The result of image segmentation
2.3 知识库构建与道路提取
在对道路的提取过程中,知识库的构建至关重要。在对地物特征进行高度抽象概括之后,结合相关的知识对其进行描述,把这些语义知识转化为规则,从而实现道路提取。在对研究区道路的物理特点和影像特点研究后,通过亮度和形状两个特征来构建道路提取知识库,再将这两个特征转化为规则进行提取。
首先,将对象分为道路和背景两种,亮度值大于219的对象提取出来归类为temp01,其余的归为背景类背景地物,初次提取结果如图4。
图4 初次提取结果Fig.4 The result of the first extraction
除了道路对象,还有很多亮度值较高的背景对象也被分了进来,这些大部分是属于反射率较高的裸地和屋顶。因为农村道路很多是泥结石等未铺装路面,在材质上和裸地几乎一致,仅从光谱特征上很难将其区分开来,这时要利用形状特征进行道路提取。

2.4 完善道路
农村道路不同于城市道路,道路狭窄,路边树木较多且地势复杂,因此道路经常被山体或树木遮挡,表现为道路被突然中断或不连续。为了尽量减少这种误差,需要将一些道路缝隙连接起来。
2.4.1 生成顺直道路段
首先对道路类temp01进行分割,生成一段一段的顺直道路段,只有这样,才能保证道路生长方向明确。步骤如下:
1)设置初始分割尺度参数fg01=20。
2)设置分割算法,采用多尺度分割,分割尺度为fg01,形状指数为0.9。在这里,要尽可能的生成顺直的对象,因此紧凑度指数也设置为0.9。
3)在生成的temp01类对象中,竖直的对象(紧凑度<2)分类为temp02,不再参与分割。
4)分割尺度自减,设置fg01=fg01×0.9。
5)设置循环,当fg01>10时,回到步骤2)继续分割,否则退出循环。
采用这种分割算法,能将道路类temp01打断,生成顺直的temp02类。分割流程如图5。

图5 分割流程Fig.5 Flow of segmentation
2.4.2 道路对象生长
道路对象周围的地物对象形状大小不一,难以进行融合生长,采用像素化边界对象的办法能使道路能正确生长,生长流程如图6。
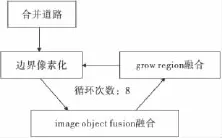
图6 生长流程Fig.6 Flow of growing
1)将背景地物类合并为一个对象,如图7(a)。
2)在背景地物类与temp02类边界处,对背景地物类进行棋盘分割,分割大小为1个像素,目的是使其交界处边缘像素化,便于进行道路生长。
3)采用image object fusion算法进行生长,设置长度拟合函数,目标权重为1,种子权重为-1,候选地物权重为0,长度拟合函数阈限为Length>0 Pxl,由此得到长度拟合函数TL-SL>0。TL是目标对象长度,SL是种子对象长度。计算机根据此函数自动进行计算,得到最佳融合方式,使temp02类中的顺直对象沿着主方向生长。
4)设置grow region算法,把背景地物类中,与temp02类相邻的,均值大于220的,融合进temp02中。此步骤的作用是加快融合进度,特别是要融合那些被当做杂斑去掉的道路对象。
用上述规则对背景地物进行反复分割,融合,循环8次后停止,结果如图7(b)。
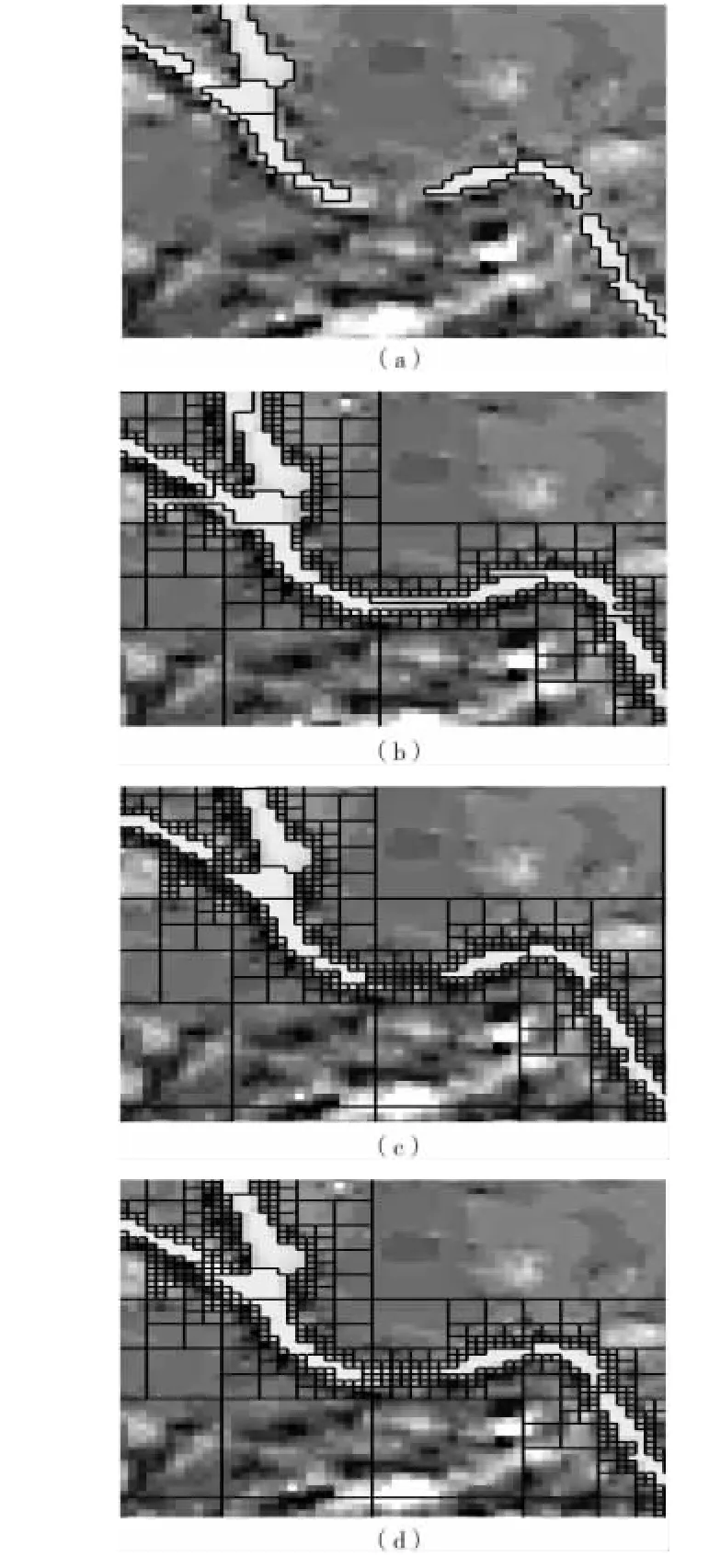
图7 道路缝隙连接Fig.7 Connection of the road gap
2.4.3 连接道路
1)首先要分离生长部位,把它归为一个新的类temp03,如图7(c)。
2)设置connector算法,将temp02类的道路段通过temp03类连接起来。并将剩余的temp03类合并到背景地物类中,如图7(d)。
3 结果评价
最后得到的temp2类就是道路提取结果,如图8。结合目视解译结果,采用Wiedemann[8]提出的完全率(Completeness)、正确率(Correctness)、提取质量(Quality)这3个指标来评价道路。完全率=提取正确道路长度/实际道路长度;正确率=提取正确道路长度/提取出的道路总长度;提取质量=提取正确的道路长度/(提取出的道路总长度+未提取出的道路长度)。

图8 农村公路提取结果Fig.8 Result of rural roads extraction
最后面向对象法提取结果为:完全率=0.87,正确率=0.94,提取质量=0.82。采用面向像元的方法对道路进行提取(监督分类),得到结果为:完全率 =0.69,正确率 =0.81,提取质量 =0.59。从图9的结果对比可以看出,面向对象法在这3个指标上均要优于面向像元的方法。
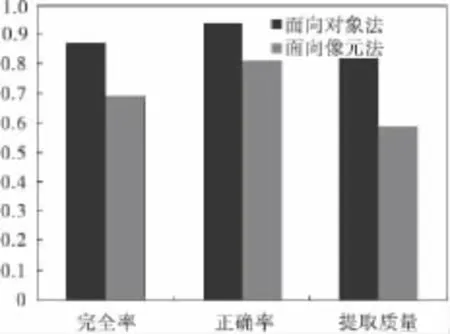
图9 提取结果对比Fig.9 Comparison of the results
4 结语
1)采用面向对象法提取农村道路,在对影像进行分割后,根据道路的光谱特征和几何特征构建了知识库,并将知识库转换为规则对道路进行提取。与面向像元的方法进行比较,能看出面向对象法具有更好的提取精度。
2)面向对象法相对于面向像元的方法,能有效的抑制杂斑的生成并提高空间信息的利用效率。
3)面向对象法处理的目标是具有丰富语义的对象而非像元,提取过程更加灵活,从而提高提取精度。
[1] 胡翔云.航空遥感影象线状地物与房屋的自动提取[D].武汉:武汉大学,摄影测量与遥感系,2001.
[2] 肖志强,鲍光淑.一种从SAR图像中提取城市道路网络的方法[J].测绘学报,2004,33(3):264-268.
Xiao Zhiqiang,Bao Guangshu.A method of extract road from SAR image[J].Acta Geodaetica et Cartographica Sinica,2004,33(3):264-268.
[3] Gruen A,Li H H.Semiautomatic linear feature extraction by dynamic programming and LSB-snakes[J].Photogrammetric Engineering& Remote Sensing,1997,63(8):985-995.
[4] 李朝峰,曾生根,许磊.遥感图像智能处理[M].北京:电子工业出版社,2007.
[5] 胡进刚,张晓东,沈欣,等.一种面向对象的高分辨率影像道路提取方法[J].遥感技术与应用,2006,21(3):184-188.
Hu Jingang,Zhang Xiaodong,Shen Xin,et al.An extraction road method based on object-oriented thought[J].Remote Sensing Technology and Application,2006,21(3):184-188.
[6] 施益强,朱晓玲,蔺方.基于多因子对象的高空间分辨率遥感影像道路提取[J].集美大学学报,2010,15(4):312-316.Shi Yiqiang,Zhu Xiaoling,Lin Fang.Based on multi-factor objects of high spatial resolution remote sensing image road extraction[J].Journal of Jimei University,2010,15(4):312-316.
[7] 孙晓霞,张继贤,刘正军.利用面向对象的分类方法从IKONOS全色影像中提取河流和道路[J].测绘科学,2006,31(1):62-63.
Sun Xiaoxia,Zhang Jixian,Liu Zhengjun.Using object-oriented classification method from IKONOS panchromatic images to extract the rivers and roads[J].Science of Surveying and Mapping,2006,31(1):62-63.
[8] Wiedemann C,Heipke C.Empirical evaluation of automatically extracted road axes[J].CVPR Workshop on Empirical Evaluation Methods in Computer Vision,1998,239:172-187.
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
数学小灵通(1-2年级)(2020年9期)2020-10-27 03:24:46
电子测试(2018年15期)2018-09-26 06:01:34
电测与仪表(2017年24期)2017-12-19 05:15:24
作文大王·低年级(2017年11期)2017-12-05 00:08:45
小学生学习指导(低年级)(2017年12期)2017-11-22 06:22:39
太空探索(2016年5期)2016-07-12 15:17:55
现代计算机(2016年12期)2016-02-28 18:35:25
读写算(上)(2015年6期)2015-11-07 07:17:55
时代英语·高三(2014年5期)2014-08-26 17:01:17
