
基于SHEPWM的中压大功率牵引永磁同步电机两电平控制
2012-08-15 05:48郭新华王永兴温旭辉
电工技术学报 2012年11期
郭新华 王永兴 赵 峰 温旭辉
(1.华侨大学信息科学与工程学院 厦门 361021 2.中国科学院电工研究所 北京 100080)
1 引言
基于高压大功率器件(3.3kV、4.5kV及6.5kV的IGBT和IGCT)的中压大功率两电平和三电平变频器传动系统已在金属压制、矿井提升、船舶推进、机车牵引等领域得到广泛的应用。在这些中压大功率传动系统中,随着器件电压、功率加大,开关损耗随之增大,散热压力增大,因此受到开关器件开关损耗以及散热的限制,最高开关频率一般在几百赫兹左右,开关频率的降低带来了PWM波形谐波大的问题,但是同时电机最高转速可以接近200Hz,因此在整个速度范围内,载波比的变化范围非常大。为了克服同步调制和异步调制各自的优缺点,中压大功率牵引异步电机的控制通常采用多模式调制方式(异步SPWM、同步SPWM、分段同步SHEPWM,方波)[1-13]。
永磁同步电机采用永久磁铁产生气隙磁通而不需要外部励磁, 可获得极高的功率密度以及转矩惯量比,因此永磁同步电机具有结构紧凑、高功率密度、高气隙磁通和高转矩惯性比等优点。开发中压大功率牵引永磁同步电机控制技术及其在高速铁路中具有非常广阔的市场应用前景。
本文提出了非方波模式时基于SHEPWM的中压大功率牵引永磁同步电机的两电平控制策略。并对该控制策略中三相电压时间域的角度值和电压矢量空间位置角的关系,SHEPWM的工程实现方法和不同PWM模式下的动态切换方法等关键技术进行研究。通过实验验证了该控制策略的消谐结果,动态切换过程的控制性能,全速度范围内d、q电流跟踪性能,最终满足系统的要求。
2 中压大功率牵引永磁同步电机全速度范围内控制策略研究
为了克服同步调制和异步调制各自的优缺点,借鉴中压大功率牵引异步电机的控制方法[10],中压大功率牵引永磁同步电机的控制采用多模式调制方式(异步SPWM、同步SPWM、分段同步SHEPWM,方波)。
根据永磁电机的数学模型可进行矢量控制,在非方波模式下,采用双PI电流环,可以同时控制电压矢量的赋值和角度。但当进入方波模式以后,电压矢量的赋值是固定的,直流电压的利用率达到最大,此时采用双PI电流控制器已经无法同时保证交直轴的电流的跟踪,为此需要引入其他控制策略。限于篇幅,本文仅对方波前的控制策略进行研究,对于进入方波后的控制策略将在后续的研究成果中进行报道。
因此,非方波模式前,采用双PI控制策略分别来控制交直轴的电流,从而达到控制电机转矩的目的,基于 SHEPWM的永磁同步电机闭环控制框图如图 1所示,其中 SPWM采用不对称规则采样,SHEPWM的开关角计算采用离线的计算方式。

图1 基于SHEPWM的永磁同步电机闭环控制框图Fig.1 Close-loop control strategy of PMSM based on SHEPWM
3 控制策略中的关键技术研究
针对图1控制策略中的SPWM和SHEPWM的实现和开关角的计算方法在文献[1,2]中已经详细介绍,在中压大功率牵引永磁同步电机的控制中可以采用相同的方法来实现,本文只对图2控制策略中的电压矢量角的推导过程、SHEPWM的工程实现和不同 PWM策略间的动态切换的三个个关键技术进行分析。
3.1 电压矢量角的推导
在矢量控制系统中,电压矢量空间位置角通过Usd和Usq进行极坐标变换来获得,而PWM波是通过三相相电压产生的,所以必须将电压矢量的空间位置等效转换成三相电压的时间量,使三相电压的合成矢量与电压矢量的指令值保持一致,通过推导可知,三相电压的时间域的角度值为电压矢量的空间位置角加上π/2,其推导过程如下:
电压矢量可以表示为

式中 θ—电压时间的空间位置角;
±—电机的正反转;
电压矢量还可以通过三相电压合成来得到,其表达式如下:
为了使电压矢量等效相等,只需
所以通过求解即可得到

在 SHEPWM模式下,双极性的逆变器的一个桥臂的基波电压可以表示为
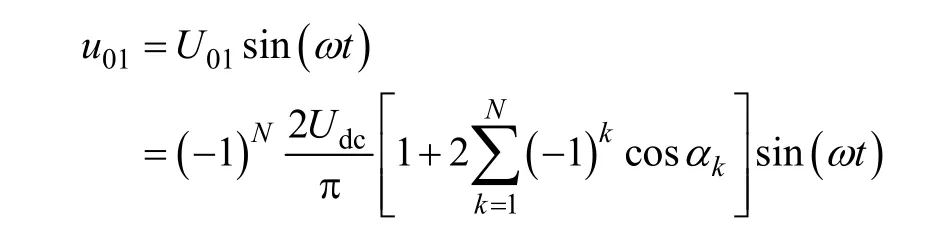
将式(5)中与SHEPWM的开关角相关的项定义为M,即为

由式(5)、式(6)可以得到
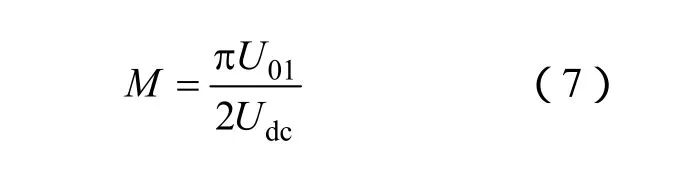
由式(7)可知,调制深度 M表征的是电压的幅值。
在矢量控制系统中,如图1中所示,M值通过Usd和Usq来计算电压矢量赋值。若坐标变换为等功率变换,则电压基波幅值可表示为

所以通过式(7)、式(8)可以得到用于矢量控制的调制深度M的表达式为

电压矢量角θ的表达式为

3.2 SHEPWM的工程实现
如前所述,因为 SHEPWM开关角是离线计算的,所以发波方式为强制赋值DSP的PWM管脚,为了保证发波的精度,设置了一个 50µs的高速中断,在高速中断中计算电压矢量角度,并将其处理成发波角度,通过将这个发波角度与当前M和开关角数N所查出的SHEPWM角度比较,在相应的开关角的位置,强制置高或置低DSP的PWM相应的管脚,从而发出SHEPWM,为了保证消谐的效果,SHEPWM在一个电周期内只查一次表。主中断用于进行控制算法的实现,其中嵌套高速中断,高速中断的优先级高于主中断,如图2所示。

图2 SHEPWM实现的软件流程图Fig.2 Software flow chart of SHEPWM implementation
3.3 不同PWM策略间的动态切换
3.3.1 SPWM与SHEPWM之间的切换
在异步SPWM和同步SPWM之间的切换不存在问题,SPWM采用非对称规则采样,但是由于载波对比的原因,参考电压和输出电压基波之间会产生相位延迟,如图3所示。SPWM为非对称规则采样,其延迟角度为πfs/(2fc),其中fs为参考波频率,fc为三角载波频率。而SHEPWM是采用高速中断实时比较的,所以参考电压和输出电压基波的相位延迟基本可以忽略,因此在SPWM模式下应该对这个延迟角度进行补偿,即可达到SPWM和SHEPWM之间的平滑切换的目的。

图3 采样延迟示意图Fig.3 Sampling delay schematic diagram
3.3.2 SHEPWM间的动态切换
采用SHEPWM调制的谐波电压为

在计算 SHEPWM开关角时,已经保证了不同开关角数的SHWPWM的基波电压相位相同,但是谐波幅值an在不同开关角数时,符号可能相反,即在不同开关角数的 SHEPWM波切换时,某次电压谐波的相位可能正好相反,见表 1,它表示的是M=0.7时的各个SHEPWM下的谐波幅值an的正负。

表1 各个SHEPWM下的谐波幅值的正负Tab.1 Sign of amplitude in different SHEPWM
从表中可以看出在相邻的 SHEPWM模式下,较低次的谐波的赋值符号相反,即当相邻SHEPWM进行切换时,会出现电压谐波相位的突变,所以当切换点选择不适合时,会造成较大的电流突变,图4所示为谐波电压过零点时的切换过程,从图中可以看出谐波电流有峰峰值的突变,而通过图5所示,若选择在谐波电流过零点时,谐波电流不会有大的电流波动。同时,由于电机速度的波动,因此在电机切换点应设置一个滞环,保证不同 PWM策略间的平滑切换。

图4 谐波电压过零点时切换波形Fig.4 Transition in voltage zero-crossing
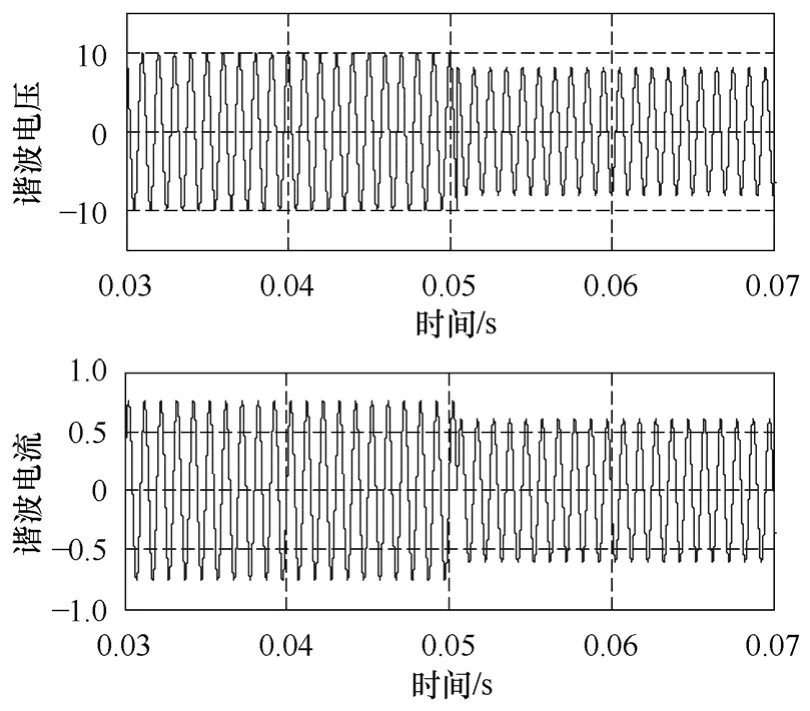
图5 谐波电流过零点时切换波形Fig.5 Transition in current zero-crossing
为保证谐波电流过零点时进行切换,只要满足A相谐波电流的过零点相对于基波电压的电角度为

同理可得,B相谐波电流的过零点为

C相谐波电流的过零点为

4 实验结果
实验过程中用的电机参数见表 2,实验过程如下:电机给定为电流,由测功机控制电机的速度,电流钳测试的波形由示波器捕获,同时将示波器上的数据存储后,通过 Matlab对其进行 FFT分析,掌握其消谐结果。

表2 永磁同步电机参数Tab.2 Parameters of PMSM
4.1 各模式下的电流波形及FFT分析
在本文中,分段同步SHEPWM有5、4、3、2、1个开关角等五种情况,5个开关角时电流波形和FFT的分析结果如图 6所示。从图 6可以看出,5个开关角消除的谐波次数为 5次谐波、7次谐波、11次谐波、13次谐波,总的THD为13.99%。同理可以得出:4个开关角消除的谐波次数为5次谐波、7次谐波、11次谐波;3个开关角消除的谐波次数为5次谐波、7次谐波;2个开关角消除的谐波次数为5次谐波;一个开关角不消除谐波。和SHEPWM的消谐理论一致,满足系统的要求。
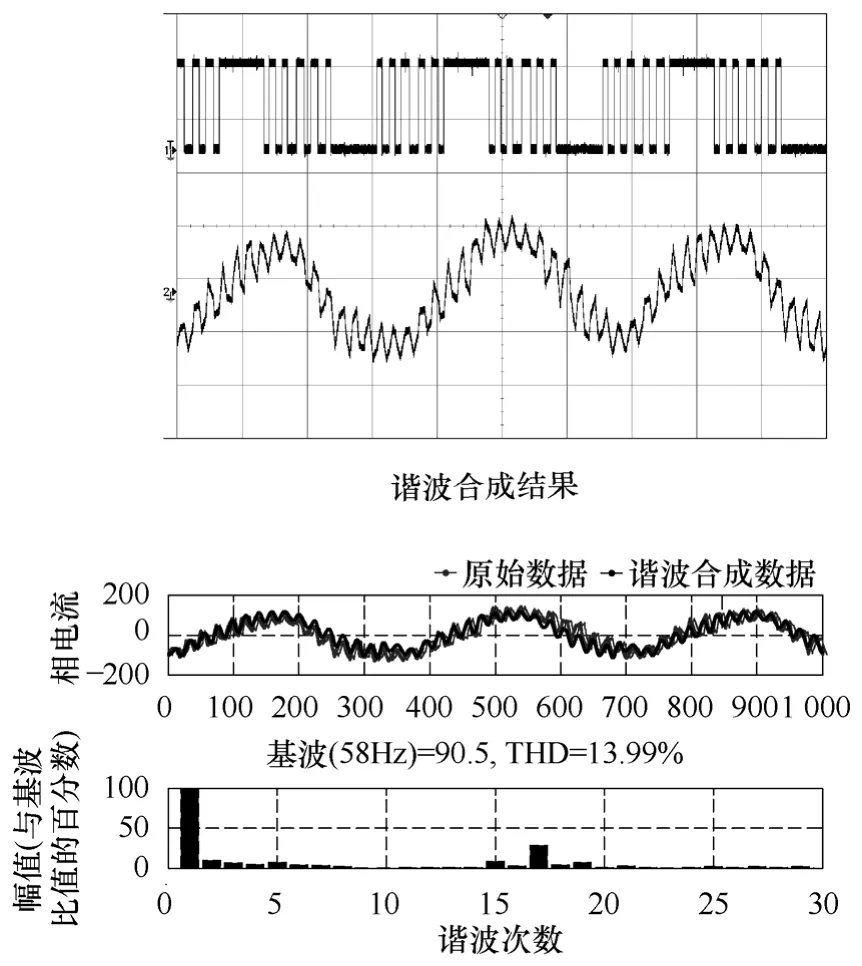
图6 N=5的SHEPWM模式下的电流波形及其FFT分析Fig.6 Stator currents and its FFT results in mode of SHEPWM with N=5
4.2 各模式间的动态切换
在实验中,根据前面 3.3节分析的理论进行实现。图7a为SPWM向5个开关角切换的波形,图7b为5个开关角向SPWM切换的波形;图8a为5个开关角向4个开关角切换的波形,图8b为4个开关角向5个开关角切换的波形。从图7和图8中可以看出电流切换平滑,同时经过试验验证:在其他开关角之间的切换过程中,动态切换平滑,这主要是采用 3.3节所述的选择在谐波电流过零点进行切换的原因。

图7 SPWM与N=5时的SHEPWM之间切换波形Fig.7 Stator currents during transition between SPWM and SHEPWM with N=5
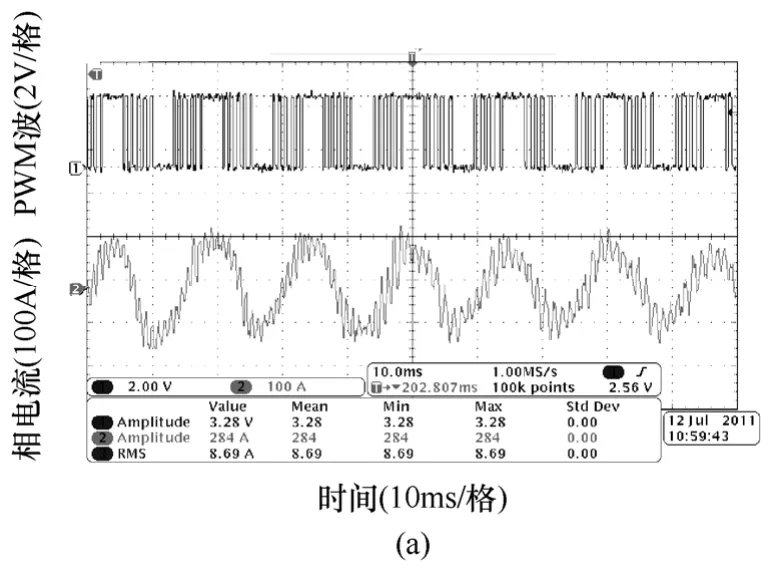

图8 N=5的SHEPWM与N=4的SHEPWM之间切换波形Fig.8 Stator currents during transition between SHEPWM with N=5 and SHEPWM with N=4
4.3 全范围内的交直轴电流
图9为全速度范围内的永磁同步电机交直轴电流波形(为让电机提前弱磁,实验时母线电压为150V),在该图中包含了方波后控制策略,但限于篇幅,本文只介绍方波控制前的控制策略,针对方波后的控制策略将在后续的研究成果中进行报道。从图9中可以看出,在全速度范围内,异步SPWM←→同步SPWM←→5个开关角SHEPWM←→4个开关角SHEPWM←→3个开关角SHEPWM←→2个开关角 SHEPWM←→1个开关角 SHEPWM←→弱磁控制等不同 PWM模式之间的动态切换过程中,交直轴电流跟踪良好,控制性能良好,实现了基于SHEPWM的永磁同步电机的闭环矢量控制,同时由于方波后采用了弱磁控制,进入方波后随着电机转速的升高,d轴电流负向增大到-70A,q轴电流减小,进行弱磁状态运行。

图9 全速度范围内的交直轴电流的波形Fig.9 The current of d and q axis in the whole speed range
5 结论
本文对基于 SHEPWM的中压大功率牵引永磁同步电机的两电平控制技术进行研究,提出其在非方波模式时的系统控制策略,研究了矢量控制中三相电压时间域的角度值和电压矢量空间位置角的关系,SHEPWM的工程实现方法和不同PWM模式下的动态切换方法。经过试验验证,本文提出的控制策略在不同的开关角下,具有良好的消谐结果;动态切换过程中电流平滑;全速度范围内,d、q电流跟踪良好,达到系统的要求。
但在研究过程中也发现,方波后的弱磁控制策略及隐极式永磁同步电机和凸极式永磁同步电机消谐时的开关角选择不能相同,相应的研究结果将在后续中报道。
[1]Taufiq J A.Advanced inverter drives for traction[C].Proceedings of the 5th European Conference on Power Electronics and Applications, 1993, 5:224-228.
[2]Enjeti P, Lindsay J F.Solving nonlinear equations of harmonic elimination PWM in power control[J].Electronics Letter,1987, 23(12): 656-657.
[3]谭新元.牵引逆变器 SHEPWM 控制技术研究[J].中国电机工程学报, 2001, 21(9):47-52.Tan Xinyuan.Advanced SHEPWM technique for AC traction drives [J].Proceedings of the CSEE, 2001,21(9):47-52.
[4]张永昌, 赵争鸣, 张颖超, 等.三电平变频调速系统SVPWM和SHEPWM混合调制方法研究[J].中国电机工程学报,2007, 27(16):72-77.Zhang Yongchang, Zhao Zhengming, Zhang Yingchao, et al.Study on a hybrid method of SVPWM and SHEPWM applied to three-level adjustable speed drive system[J].Proceedings of the CSEE, 2007, 27(16):72-77.
[5]佟为明.PWM逆变器特定消谐式谐波抑制技术的研究[D].哈尔滨:哈尔滨工业大学, 1999.
[6]Chiasson J, Tolbert M, McKenzie K, et al.A complete solution to the harmonic elimination problem[C].IEEE Trans.Power Electron, 2004: 491-499.
[7]Agelidis V G, Balouktsis A, Balouktsis I.Multiple sets of solutions for harmonic elimination PWM bipolar waveforms: analysis and experimental verification [J].IEEE Trans.on Power Electronics,2006, 21(2): 415-421.
[8]李威, 车向中, 郝荣泰.交-直-交电力机车 PWM调制方法研究[J].铁道学报, 2000, 22(6):26-31.Li Wei, Che Xiangzhong, Hao Rongtai.Research on PWM method for AC-DC-AC electric locomotive[J].Journal of the China Railway, 2000, 22(6):26-31.
[9]Yooske Nakazawa, Shin Ichi Toda, Ikuo Yasuoka, et al.One-pulse PWM mode vector control for traction drives[C].IEEE Workshop on Power Electronics in Transportation, 1996: 135-141.
[10]Mermet Guyennet M.New power technologies for traction drive[C].International Symposium on Power Electronics, Electrical Drives, Automation and Motion, 2010: 719-723.
[11]黄瀚, 纪延超, 张辉, 等.优化特定消谐PWM技术[J].中国电机工程学报, 1997, 17(5):344-347.Huang Han, Ju Yanchao, Zhang Hui, et al.The optimal technique for selected harmonics elimination[J].Proceedings of the CSEE, 1997, 17(5):344-347.
[12]郭新华, 温旭辉, 赵峰, 等.基于电磁转矩反馈补偿的永磁同步电机新型 IP速度控制器[J].中国电机工程学报,2010, 30(27):7-13.Guo Xinhua, Wen Xuhui, Zhao Feng, et al.A novel IP speed controller of PMSM based on electromagnet torque feedback compensation[J].Proceedings of the CSEE, 2010, 30(27):7-13.
猜你喜欢
防爆电机(2020年6期)2020-12-14
电子制作(2019年16期)2019-09-27
中华建设(2019年3期)2019-07-24
北京航空航天大学学报(2017年3期)2017-11-23
电镀与环保(2016年3期)2017-01-20
光学精密工程(2016年3期)2016-11-07
火控雷达技术(2016年1期)2016-02-06
西部广播电视(2015年8期)2016-01-16
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年18期)2014-04-04
