
智能环境下移动机器人任务规划与执行系统架构设计
2012-08-15 11:37房芳马旭东钱堃梁志伟
东南大学学报(自然科学版) 2012年1期
房芳 马旭东 钱堃 梁志伟
(1东南大学复杂工程系统测量与控制教育部重点实验室,南京 210096)(2南京邮电大学自动化学院,南京 210046)
未来移动机器人真正成为人类便捷友好的助手,首先需要能够适应在与人共存、高度动态的应用环境中与人和谐共处[1-2].这对于机器人能够在已知应用环境模型中根据任务需求进行任务规划起着关键的作用.同时,为了有效降低机器人成本、提高机器人执行任务的能力,智能环境或智能空间[3-5]与机器人相结合已成为必然趋势.
机器人规划研究主要在于机器人处于有噪音的各类环境模型中,各种感知信息都在一定程度上具有不确定性,这样机器人就需要将感知和执行进行整合来进行直接规划.Hoffman 和 Breazeal[6-7]的研究表明机器人对人的行为识别和推理以及机器人据此进行自身任务规划及执行能够有效提高人机合作与交互能力.而智能环境恰好能够通过其复杂联合感知和执行能力对其空间中的服务对象人行为进行监控识别和推测.在Montreuil等[8]提出的人机联合任务规划器HATP(human aware task planner),以及 Galindo 等[9]提出的人机协作规划方法中,机器人并没有考虑服务对象人的行为动作习惯,而只是简单预测人的行为规划提供给机器人规划器.Mausam[10]提出的 CoMDPs(concurrent markov processes)方法是完全可观的MDPs(markov decision processes)扩展,同时提出如何计算得到一系列能够被同时安全执行且具有一定持续时间的规划行为,但该方法仅针对机器人单一智能体且随机的行为动作执行时间大大增加了计算负担,并不适合机器人在线规划任务.针对以上应用,本文研究在移动机器人传统的确定型任务规划和执行中,考虑服务对象人类存在等动态环境,并充分利用智能服务构件,通过机器人任务规划和执行与在线再规划-执行,达到优化服务功能.
1 分布式移动机器人系统架构
为体现机器人的主动性,本系统采用一种以机器人为中心的服务构件化的移动机器人系统基本架构,如图1所示.
该系统由移动机器人和环境智能节点两部分组成,它们同处在一个环境当中,相互之间通过网络相连,这里的网络可以是无线的,也可以是有线的,既包括局域网,也包括互联网.因此,这里的环境包括本地环境和互联网环境,环境智能节点也包括本地智能节点和互联网智能节点.环境智能节点实际上就是各个辅助资源设备,它们分布在空间中,可以固定地嵌入环境,也可以具备一定移动性,例如移动小车、活动机械臂等等,它们都有独立的IP,以网络节点的形式提供访问.在整个架构中,机器人作为系统的核心,负责完成各种任务,而环境智能节点则是互相协作起来为其提供各种各样的辅助,协助其完成任务.
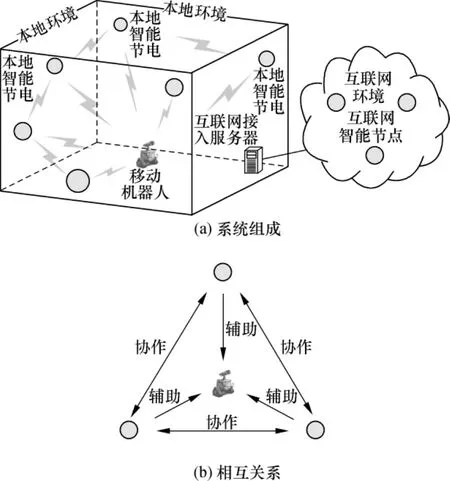
图1 以机器人为中心的分布式智能系统
由于分布式机器人系统的分布性和自主性的特点,以及所处观测环境的动态特性,本文采用A-gent映射各个智能构件,将整个分布式构件化机器人系统构建成一个MAS系统[11],按照构件智能水平的高低将其划分成3个不同层次的Agent:A1,A2和IAAs(interaction agents),其中A1表示智能水平最高的移动机器人,其主要作用是总体任务规划和分配,同时能够对环境中的其他智能构件进行控制和协调.A2表示环境中其他的智能构件节点,通过任务建模、匹配、筛选完成任务分配过程,并将获得的子任务分解成一系列具体的机器人可执行的动作序列.IAAs表示和机器人有行为交互的服务对象人智能体,通过与A1的交互和协商解决避免人机冲突/阻塞和不友好的问题.本文提出在完全分布式结构的基础上,加入集中式结构的优点,引入复合Agent和移动Agent概念,建立一种高可靠性的分布式机器人系统的多Agent结构,具体结构如图2所示.

图2 机器人系统多Agent结构
与完全分布式结构不同的是,将集中式结构和分布式结构相结合,同时引入复合Agent和移动Agent技术,对机器人Agent和智能构件Agent进行了重新定义,将其功能分成两部分:A'1和A'2,其中A'1的功能是总体任务全局规划,能够对整个系统进行整体集中监控,具体功能主要是根据服务对象人智能体的日程安排和其返回的状态进行任务分析,确定系统将要执行的任务计划,并在自动任务发现分配机制的基础上完成任务分配和规划,同时对智能节点进行监督控制.正常情况下只有机器人节点上的A'1起作用,其他智能构件上的A'1不发挥作用.通常整个系统的规划功能通过机器人A'1与智能构件A'2共同完成.同时A'1具有移动性,在机器人节点功能失效时可由智能构件节点上的A'1代替,这种移动智能体技术增加了整个规划系统的可靠性和稳定性.A'2的主要功能是任务的分解执行,正常情况下只有智能构件节点上的A'2起作用,只有当其功能失效时才会转移到机器人节点的A'2上.在这种集中式和分布式相结合的系统架构下,任何时刻都有且只有一个节点负责整体任务规划与执行控制,因此能够保证系统的全局最优性和可控性.另外,提出基于语义功能建模与匹配的自动任务发现分配机制,并在此基础上实现了机器人系统自动任务规划与执行策略,各Agent间通过建模、匹配、筛选完成任务分配过程,有效解决了环境动态未知性带来的问题.同时引入IAAs智能体,提出一系列人机和谐相处的规则,有效实现对人友好的机器人自主任务规划与执行,提高了系统对服务对象人的适应性,满足人机和谐相处的需求.
2 构件化环境下任务规划与执行系统基本层次结构
将整个分布式构件化机器人系统的任务规划与控制分为任务计划层、任务分配层、IAAs管理层、自主规划层和构件管理层5个层次,如图3所示.
其中任务计划层根据IAAs的日程安排和IAAs管理层返回的状态进行任务分析,确定系统将要激活的任务计划.任务由多个分解的子任务构成,子任务的执行优先级各不相同,因此还需要按照各个子任务的优先级顺序对其进行排序、组合等,从而最终确定其执行顺序,同时对整个系统任务进行监控与协调,对由于动态环境而没有完成的任务进行挂起或收回,再根据其任务优先级和执行时间重新进行规划.
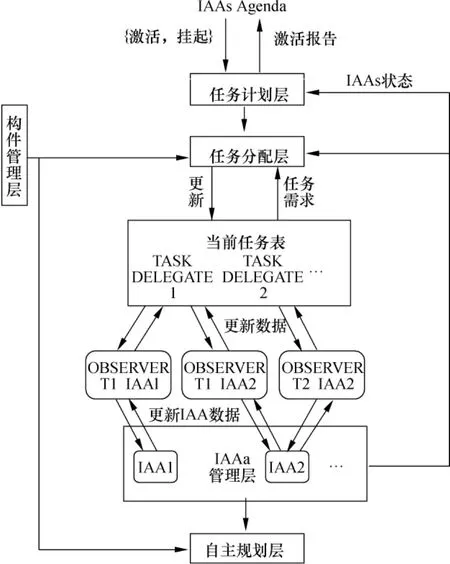
图3 分布式构件化机器人系统层次结构图
任务分配层主要完成任务对智能构件和机器人的分配过程,同时满足既定的优化目标.引入语义网技术,提出基于语义功能建模与匹配的自动任务发现分配机制,并在此基础上实现了机器人系统自动任务规划与执行策略,各Agent间通过建模、匹配、筛选完成任务分配过程,有效解决了环境动态未知性带来的问题.
IAAs管理层主要负责对和机器人有行为交互的服务对象智能体进行构建和更新管理,为了进行对人友好的机器人自主任务规划与执行,借鉴人际相处中的若干习惯原则,如不侵犯他人的个人空间、人机交互最小范围、对他人保持可视性、遵守行驶靠向、预测并礼让他人等,对此类原则进行量化,构建约束条件融入机器人任务规划器中.
自主规划层主要在机器人节点和各个智能构件节点上运行,将获得的子任务分解成一系列具体的机器人可执行的动作序列,包括建立自主规划模型和开发高效的规划执行算法,这部分功能在各个智能节点上自主运行,而不需与其他节点协作执行.
构件管理层对辅助机器人的各种智能构件进行集中管理和监控,从而能够合理高效地利用智能环境中的构件资源.分布式构件化机器人系统中的构件资源多种多样,如智能视觉节点、移动小车等,必须对这些资源进行全局监控和管理.在构件管理层的统一管理下,各个智能构件将其功能模型与任务需求模型进行匹配,筛选出符合要求的任务并按功能相似度排序,从而形成可直接调用的候选服务列表,当异常事件发生时,如节点出现故障,构件管理层即可通过网络发出故障信号并再次向机器人或其他构件发出资源请求信息,从而重新进行任务分配和规划执行功能.
3 任务规划方法
多Agent协商(任务规划分配)模型如图4所示.机器人Agent是分布式机器人系统任务规划的组织者和管理者,是与服务对象智能体IAAs的唯一接口,负责定期从IAAs获取新任务,并将任务及时分配和执行.其他服务构件Agent均在机器人Agent的控制下通过建模、匹配、筛选完成任务分配过程,并分解执行得到的子任务,并向机器人A-gent进行任务执行结果反馈操作,从而最终通过机器人Agent反馈给IAAs,有效解决了环境动态未知性带来的问题.通过这种任务分配、执行方式可以最大程度上实现智能构件环境下机器人系统的自主运行,增强系统的稳定性和可靠性.机器人智能体对服务构件智能体的查询请求中包含任务需求模型描述,服务构件智能体先采用自己的匹配算法判断是否反馈,但只完成一部分匹配工作(例如只关注入口参数的匹配,即先保证机器人提供的入口参数能够支持任务运行),另一部分则交给机器人完成(例如出口参数的匹配,保证任务能够提供所需信息).这样,最终得到的是“双方都认可的服务”.

图4 任务规划分配模型
4 结语
本文建立了智能服务构件环境下机器人任务规划与执行系统基本框架.通过机器人Agent、智能构件Agent与交互人Agent之间不断的协作过程完成任务的规划、分配与执行.通过一系列人机和谐相处的规则,使任务分配对服务对象人具有一定适应性.该架构将机器智能分散到智能构件中,有效解决规划问题中计算量过大的瓶颈问题.
References)
[1]Karola P,Sebastian W,Christian S J,et al.Attitude of German museum visitors towards an interactive art guide robot[C]//Proceedings of the 6th ACM/IEEE International Conference on Human-Robot Interaction.Lausanne,Switzerland,2011:227-228.
[2]Taha T,Miro J V,Dissanayake G.A POMDP framework for modelling human interaction with assistive robots[C]//IEEE International Conference on Robots and Automation.Shanghai,China,2011:544-549.
[3]Luo R C,Zhan J W,Cheng W H,et al.Networkbased multimodal human-robot interactions in ubiquitous computing environment[C]//IEEE International Conference on Robotics and Biomimetics(ROBIO).Bangkok,Thailand,2009:131-136.
[4]金欣,辅助移动机器人的智能环境服务构件开发及其应用[D].南京:东南大学自动化学院,2010.
[5]Qian Kun,Ma Xudong,Dai Xianzhong,et al.Semantic service composition mechanism for componentbased robotic system[C]//Proceeding of 37th Annual Conference of IEEE Industrial Electronics Society.Melbourne,Australia,2011:3192-3197.
[6]Hoffman G,Breazeal C.Cost-based anticipatory action selection for human-robot fluency[J].IEEE Transactions on Robotics,2007,23(5):592-561.
[7]Hoffman G,Breazeal C.Effects of anticipatory action on human-robot teamwork—efficiency,fluency,and perception of team[C]//Proceedings of the International Conference on Human-Robot Interaction.Washington,DC,USA,2007:1-8.
[8]Montreuil V,Clodict A,Ransan M,et al.Planning human centered robot activities[C]//IEEE International Conference on Systems, Man and Cybernetics.Montreal,Cook Islands,2007:2476-2481.
[9]Galindo C,Fernandez-Madrigal Juan-Antonio,Gonzalez J.Multihierarchical interactive task planning:application to mobile robotics[J].IEEE Transactions on Systems Man and Cybernetics Part B-Cybernetics,2008,38(3):785-798.
[10]Mausam Weld D S.Planning with durative actions in stochastic domains[J].Journal of Artificial Intelligence Research,2008,31:33-82.
[11]张正强.基于MAS的分布式成像卫星系统任务规划与控制问题研究[D].湖南:国防科学技术大学信息系统与管理学院,2006.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
制造技术与机床(2017年3期)2017-06-23
国际木业(2016年8期)2017-01-15
国际木业(2016年12期)2016-12-21
国际木业(2016年3期)2016-12-01
国际木业(2016年1期)2016-12-01
雷达与对抗(2015年3期)2015-12-09
自动化博览(2014年12期)2014-02-28
