
液控式垄向区田筑垱机的设计及仿真
2012-08-09 06:46尹大庆陈宝成
东北农业大学学报 2012年8期
尹大庆,周 义,陈宝成
(东北农业大学工程学院,哈尔滨 150030)
典型黑土区的水土流失主要发生在坡耕地,坡耕地的水土流失面积占黑土区水土流失总面积80.3%。黑龙江省坡耕地占全省总耕地面积60%。
垄向区田水土保持技术是在垄作坡耕地中,沿垄沟间隔一定距离修筑土,形成一个个小浅穴,起到就地拦蓄雨水的作用,是目前唯一能落实于农业生产中的水土保持技术[1]。该技术有效缓解了土地的强降雨与弱入渗的矛盾,达到保水、保土、保肥和防治水土流失的效果,同时又可充分利用水资源、提高作物产量[2],促进农民增产、增收,是保护生态环境、促进农业可持续发展的一项有效措施[3]。垄向区田采用人工来修筑,劳动强度大,作业质量不易保证,并且效率低、误农时[4]。为了提高工作效率和作业质量,本文设计了一种液压控制式垄向区田筑机。通过Pro/E建模和ADAMS虚拟样机运动学分析,验证了其工作原理的可行性,为垄向区田技术提供了一种新机具。
1 液压控制式垄向区田筑机的设计
1.1 设计要求
④机具工作性能可靠,不刮垄肩和幼苗;
⑤作业速度4~6 km·h-1,距60~200 cm。
1.2 结构及工作原理

图1 液压控制式结构原理Fig.1 Structure and principle diagram of mechanism controlled by Hydraulic

图2 控制盒结构Fig.2 Structure diagram of control box
控制盒(见图2)由小转臂(12)、限位销(13)、大转臂(14)、控制盒体(15)和复位弹簧(16)等组成。在筑机工作时小转臂住大转臂,下铲板搂起垄沟中的土壤,当拉线拉动小转臂转过一定角度时,大转臂被松开,挡滚在土壤推力的作用下抬起,铲板被释放形成土。接着大小转臂在复位弹簧的作用下恢复原位,挡住下一铲板。小转臂的侧壁形状按大转臂端部的运动轨迹设计,使得大小转臂在复位过程中,大转臂的端部始终沿着小转臂的侧壁运动,顶住小转臂,保证大转臂先复位,小转臂后复位,防止大小转臂在复位过程中卡死。同时在小转臂的侧壁设计一拐角与大转臂的上壁平行,在大转臂转到这一位置时产生一瞬时冲击,改变其转动方向,缩短复位时间,限制转动角度防止产生撞击。在大转臂的下壁处设有限位销,控制盒壳体呈前端开口状,控制盒盖通过五个螺钉与控制盒壳体固定形成封闭壳体,加黄油润滑。此处为双转臂机构,由于小转臂轻巧,控制灵活,使整个机构具有很好的灵敏性[5],并运用了省力杠杆原理,使工作时所需控制力小,加上良好的润滑,可长期连续工作。
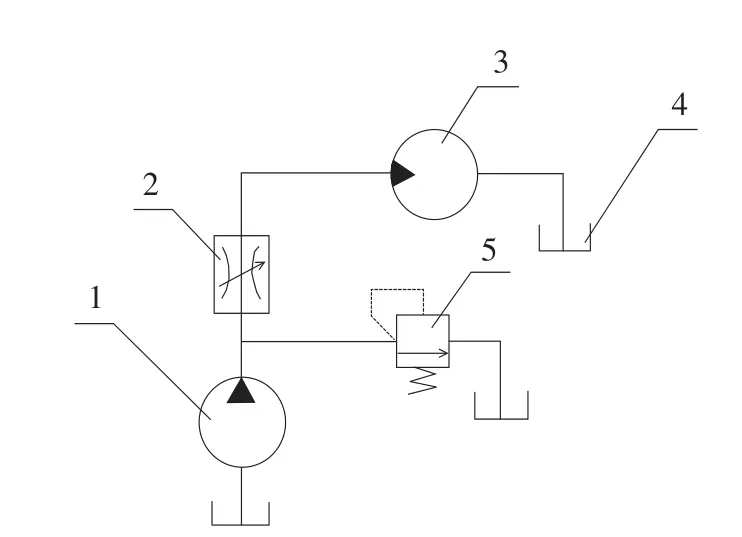
图3 进口节流调速回路Fig.3 Loop of the import reduces expenses to modulate velocity
2 三维建模及运动学仿真
2.1 Pro/E三维建模
此设计中的凸轮机构采用滚子摆动从动件平面凸轮机构,在CAD中绘出所设计凸轮的轮廓曲线并导入Pro/E进行拉伸形成三维实体(见图4),并设计了摆杆、拉线、控制盒、挡滚、四叶板翻转铲等其他部件,将其进行总体装配,装配后的模型如图5所示。
2.2 应用ADAMS进行运动学仿真分析
鉴于ADAMS仿真功能的强大,将Pro/E模型导入ADAMS进行运动学仿真分析。在导入模型中定义各零件材料属性,添加各部件间的连接副如表1所示(固定副在此省略);施加载荷,在四叶板翻转铲上施加扭矩模拟作业中土壤的推力,并在大、小转臂与固定弹簧螺栓间分别施加拉伸弹簧;在凸轮的旋转副上添加旋转驱动电机,在犁铧的移动副上添加移动驱动电机,开启运动学仿真。
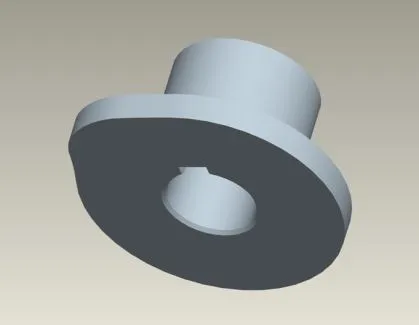
图4 凸轮三维实体模型Fig.4 Three-dimensional solid model of cam

图5 筑垱机装配模型Fig.5 Assembly model of dimming machine
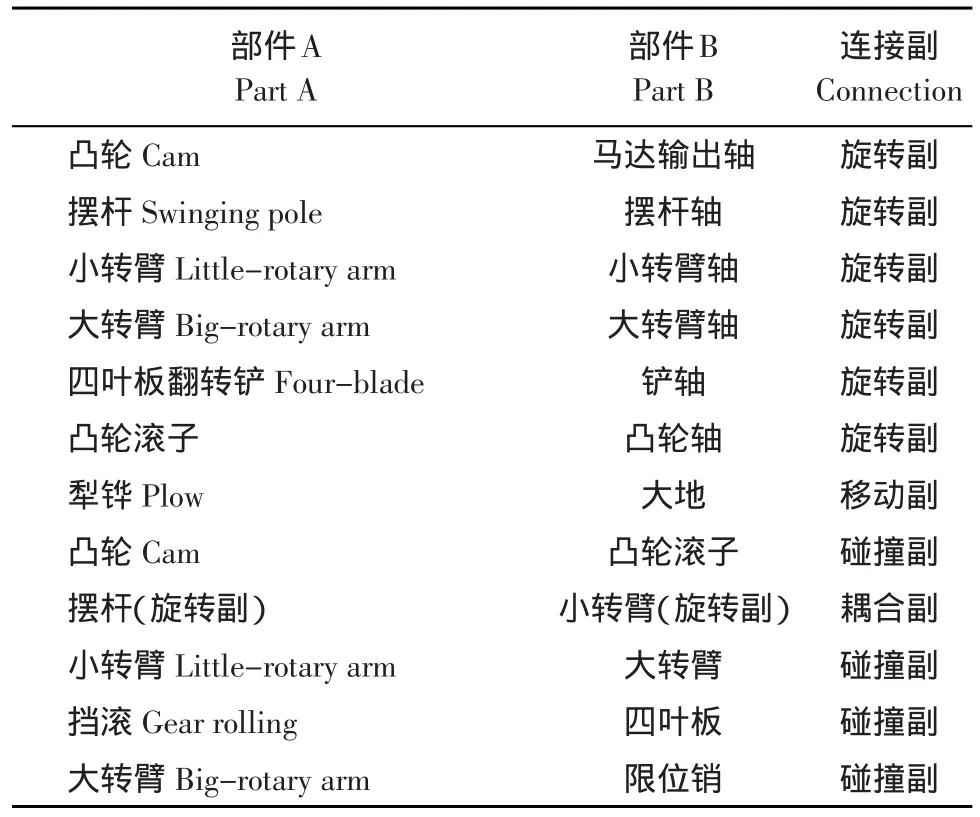
表1 各部件间连接副Table 1 Connection of each part
通过运动学仿真分析可知,机构在运动过程中无干涉现象,并得到上四叶板顶部点的运动轨迹见图6。
由图6可以看出,此为四叶板翻转一个周期360°的轨迹,轨迹1段表示上四叶板在上部保持不动,随着拖拉机前进,四叶板翻转90°形成一土挡,上四叶板翻转到前部得到轨迹2段,拖拉机继续前进,上四叶板翻转到下部得到轨迹3,筑出第二个土, 接着翻转到后部得到轨迹4,筑出第三个土,然后翻转到上部初始位置筑出第四个土。如此周期循环完成垄向区田筑作业,图中S为所筑土的距,即根据不同坡度调节上述节流阀的通流面积,使得S满足最佳距要求值。仿真结果表明,所设计的液控式垄向区田筑机能够满足预期的设计要求,工作原理可行。

图6 上四叶板顶部点运动轨迹Fig.6 Motion trajectory of top point to the four-leaf board upside
3 结论
[1]沈昌蒲,刘立意,王秋华,等.水土保持新技术—垄向区田的基本原理及运用[J].中国水土保持,2007(10)∶19-21.
[2]李晓兵,于建水.1QD型垄向区田筑挡机及其在坡耕地的试验效果[J].现代化农业,2003(2)∶39-40.
[3]张影微,刘立意,冯江,等.1QD型垄向区田筑挡机的原理与应用[J].农业科技与装备,2009(6)∶49-51.
[4]尹大庆,冯江,刘立意,等.1QD-3型垄向区田筑挡机的研制[J].农机化研究,2003(1)∶95-96.
[5]尹大庆,冯江,温锦涛,等.1QD型垄向区田筑挡机控制机构的研究[J].农机化研究,2009(1)∶240-242.
猜你喜欢
中国水土保持(2022年2期)2022-04-07
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年8期)2019-09-03
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中国水土保持(2018年5期)2018-05-10
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
海军航空大学学报(2015年1期)2015-11-11
中国水利(2015年24期)2015-04-25
