基于AVR的风光互补路灯控制系统设计
2012-08-08 08:09何薇薇杨金明
照明工程学报 2012年1期
何薇薇 卢 金 杨金明
(1.中山火炬职业技术学院,广东中山 528436;2.中山普润斯电源设备技术有限公司,广东中山 528436;3.华南理工大学电力学院,广东广州 510640)
1 引言
太阳能和风能作为两种应用广泛的可再生资源,在资源条件和技术应用上都具互补性。风光互补路灯是独立的供电系统,它能有效地利用风能和太阳能在能量及时间上的互补性通过两者各自的发电装置,共同向蓄电池充电[1]。风光互补路灯无需铺设复杂、昂贵的管线,可任意调整灯具的布局,安全节能无污染,充电及开/关过程采用光控自动开关.无需人工操作,工作稳定可靠,节省电费,免维护,其实用性已经得到人们的认可。
本文介绍了基于AVR单片机的智能型风光互补路灯控制系统的设计,对风光发电中最大功率跟踪控制 (MPPT),蓄电池充电控制的关键技术进行研究,提高了风光互补路灯控制器的可靠性和运行效率,并进一步优化控制技术,降低了投入成本。
2 系统构成
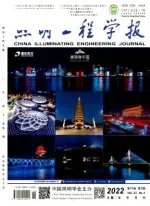
风光互补路灯系统结构如图1所示,系统主要由电能产生、电能变换、电能存储消耗、充放电控制等四部分组成。
电能产生分为风力发电和光伏发电两个部分。电能变换主要由Boost和Buck DC/DC变换器来实现。电能的存储主要由蓄电池来承担,在整个系统中起到电能调节和平衡负载的作用。电能的消耗主要由卸荷电路、直流负载 (即路灯)两部分组成。充放电控制器由AVR单片机及外围电路组成,控制光伏电池方阵和风力发电机以最佳的充电电流和电压快速、平稳、高效的对蓄电池组的充电,实现蓄电池向负载供电,同时避免过充电和过放电现象的发生,保护蓄电池,延长蓄电池的使用寿命。
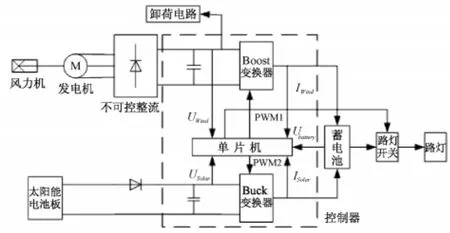
图1 风光互补路灯系统结构
3 系统控制策略
3.1 最大风能捕获控制策略
风力机从自然中所能索取的能量是有限的,而且随机性较强,最大风能跟踪 (MPPT)是风力发电的核心问题[2,3],本系统采用变步长扰动的爬山搜索法,设在某一风速下,风机的功率输出曲线如图2所示。
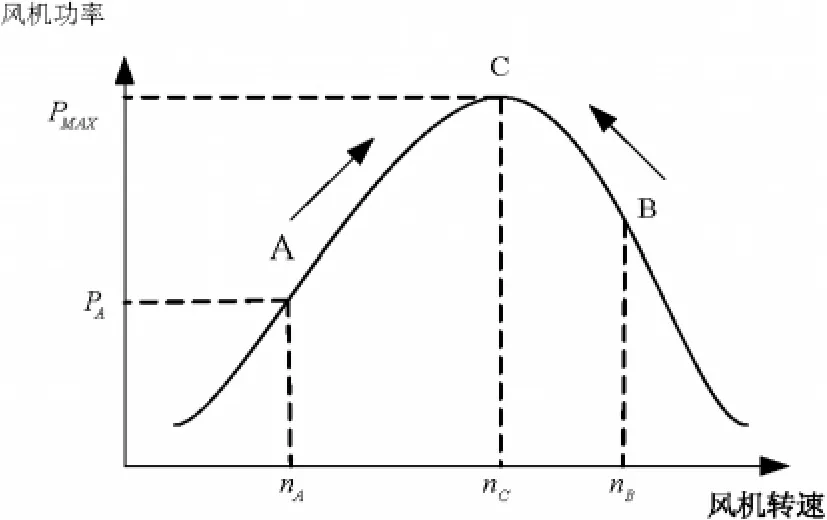
图2 风机的功率输出曲线
从图中可以看出,风机的转速nC点对应这风机最大输出功率PMAX。若风机未工作在最佳点,假设工作在A点,用步长d1对风机转速进行扰动,扰动后风机的输出功率为P2,进行比较。若P2>PA,则说明扰动方向正确,继续向该方向扰动;若P2<PA,则说明扰动方向不正确,用同样的步长d1,向相反方向扰动,进行比较;若向两个方向扰动均得到P2<PA,则改变步长,用步长d2(d2<d1),重复上述步骤,步长d2的大小可以视实际情况而定。风机的由工作点A逐渐逼近最佳工作点C点。当步长d的值小于dmin(︱d︱<dmin)时,停止扰动,此时风机近似工作在最大功率点附近。
3.2 光伏发电最大功率跟踪控制策略
光伏电池板的输出是非线性的,其输出受光照强度、温度和负载特性的影响。本系统采用自适应爬山算法化,该算法在光伏电池所处环境发生变化时可快速跟踪最大功率点变化,使光伏系统始终输出最大功率。自适应爬山法通过控制DC/DC变换器开关管的占空比D,即根据功率的变化在线自动调节占空比的变化量a,从而调整光伏电池输出功率,使其始终输出最大[4]。要使光伏电池功率输出最大,就要满足dP/dD=0。当dP/dD>0时,系统工作在最大功率左边;当dP/dD<0时,系统工作最大功率点右边。P-D曲线如图3所示。

图3 P-D曲线图
3.3 蓄电池充放电控制策略
结合风力发电和太阳能发电的特点,二者独立给蓄电池充电,互不影响,从而满足风光互补路灯系统的要求。由于光伏发电相对比较稳定,而风力发电波动性比较强,因此将光伏发电的充电电流Isolar作为蓄电池充电电流的基础部分,在充电过程中优先选用光伏充电,在光伏充电电流Isolar的基础上,控制风力发电充电电流Iwind,使得满足蓄电池充电的要求,蓄电池的充电电流Ibattery满足:Ibattery=Isolar+Iwind。结合蓄电池充电策略,将蓄电池充电过程分为三个阶段[5],如图4所示,具体的充电过程如下:
图4 蓄电池实际的充电电流曲线
(1)限流充电阶段:由于风能、太阳能的不确定性,很难实现理想的恒流充电方式,所以充电电流是一个不确定的波动过程,充电电流最大上限IMAX作为理想充电的恒流值。光伏发电采用MPPT控制,使光伏太阳能电池板工作在最大功率点附近;风力发电部分在满足的情况下采用最大功率点跟踪控制方式,尽可能多的利用风能发电,当Ibattery>IMAX时,放弃风力发电的MPPT控制,维持充电电流小于等于限定值IMAX。
(2)恒压充电阶段:当蓄电池容量达到90%时,采取恒压充电,保持蓄电池的充电电压为一个恒定值。采用PI控制分别对风力发电和光伏发电的输出进行控制。当蓄电池充电电流减小到C/100(C为蓄电池容量)时,表明蓄电池充满。
(3)浮充阶段:蓄电池充满后,进入浮充阶段。为了弥补由于蓄电池自放电造成的储能损失,蓄电池电压保持浮充电压,通过调节电流使之维持在这个电压水平。
4 系统硬件设计
本系统采用ATmel公司的ATmega8单片机为主控制芯片,其是适用于实时控制系统的8位单片机,内置三通道PWM、8路10位的ADC、面向字节的两线接口、两个可编程的串行USART及可工作于主机/从机模式的SPI串行接口,具有硬件系统设计简单、运行速度快、功耗小等优点。其结构功能如图5所示。
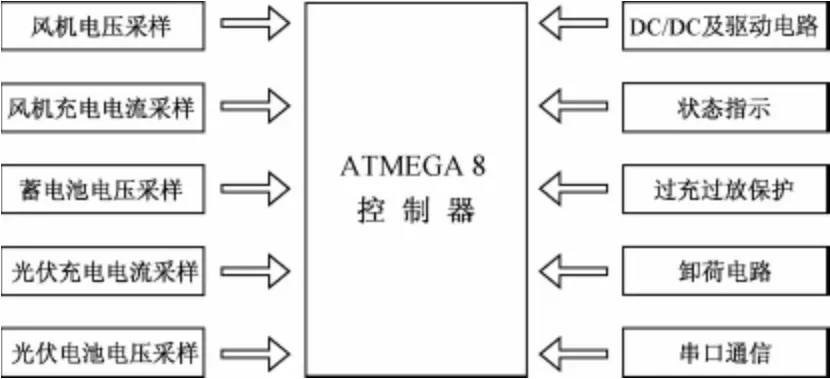
图5 风光互补路灯控制器框图
4.1 检测电路
控制器对光伏电池板输出电压、风力发电整流输出电压、蓄电池电压、光伏充电和风力发电充电电流等变量进行实时检测。
(1)电压检测电路
电压检测电路如图6所示,采样点电压由R1和R2分压后,经过一个由LM324运算放大器组成的电压跟随器输出,然后将输出送到单片机的AD采样引脚。
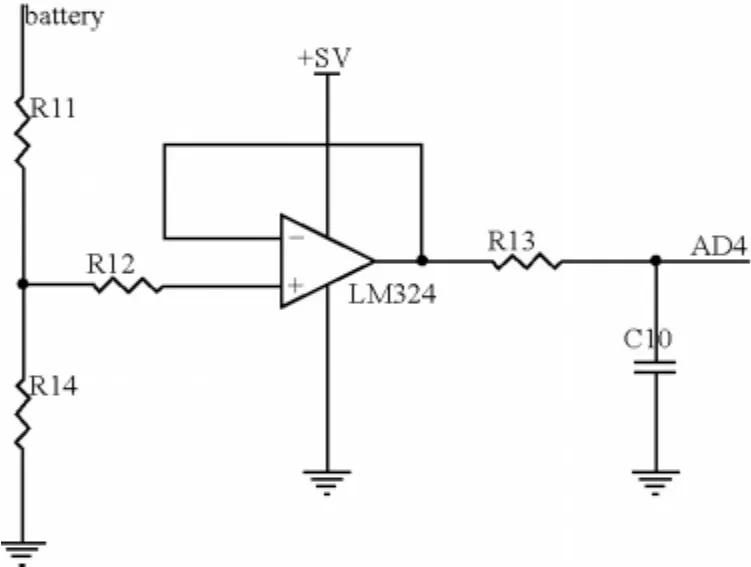
图6 电压检测电路
(2)电流检测电路
电流霍尔传感器采用浙江大丰模块DT-100P,该传感器有3个接线端子。+端:电源+15V;-端:电源-15V;M端:信号输出端,见图7。
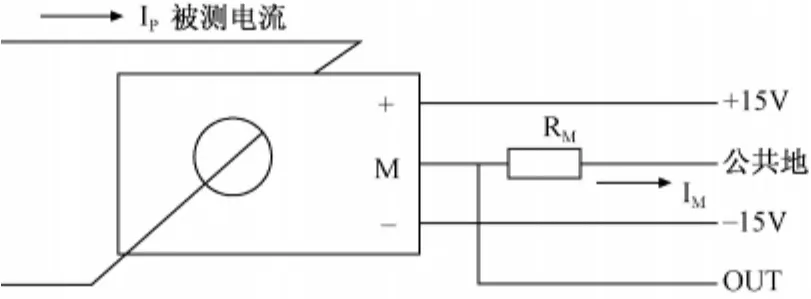
图7 DT-100P的原理结构框图
4.2 DC/DC变换器驱动电路
为了保证功率驱动电路与PWM脉宽调制电路的可靠隔离,同时具备直接驱动MOSFET的能力,本文选用了日本东芝公司生产的TLP250光耦MOSFET驱动芯片,驱动电路如图8所示。

图8 MOSFET驱动电路
4.3 卸荷电路
当风力很大,但没有超过速保护限定值时,风机仍对蓄电池或负载进行供电,由于风机输出功率比较大,会对控制器造成很大的冲击,利用卸荷电路,卸掉一部分功率,从而减小由于风大对控制器造成的冲击。如图9所示,其中R17为消耗电阻,将功率转化成热量。

图9 卸荷电路
5 系统软件设计
主程序流程图如图10所示,在主程序的开始,首先初始化单片机控制PWM模块、AD采样模块以及定时器等。然后,检测风机空载输出电压,当电压超过卸荷限定值时,根据风机整流输出电压的值来调节卸荷电路开关管驱动信号PWM占空比,开启卸荷电路。当需要检测蓄电池状态时,进行AD采样检测,根据蓄电池状态来选择进入过充过放保护模式、限流充电模式、恒压压充电模式或是浮充模式。

图10 主程序流程图
6 实验结果
图11为风力发电和光伏发电变换器同时给蓄电池充电的电流波形,由图中可以看到电流在上升阶段的尖峰部分为光伏充电的超调电流,对整个充电过程基本没有影响,蓄电池的充电过程能够达到预期要求。
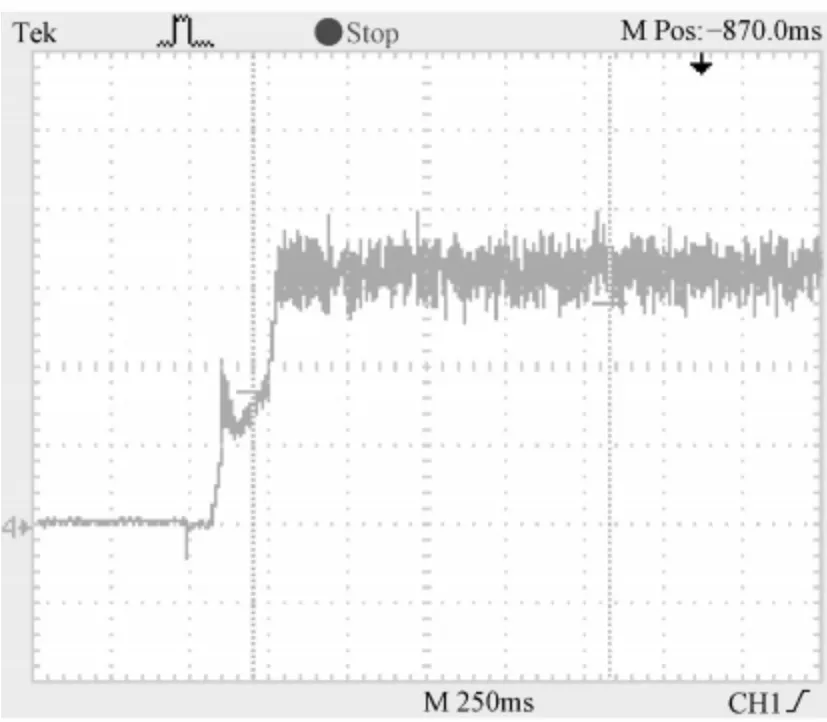
图11 风机与光伏电池同时给蓄电池充电电流波形
7 结论
本文介绍的风光互补路灯控制系统能够很好地实现风机和光伏电池对蓄电池的互补充电,控制器具有良好的启动特性,并成功地运用到了600AV风光互补路灯控制器系统中,可以达到技术升级与降低成本并举,使用方便可靠、易于生产、维护和升级等许多优点。对上述硬件和软件稍作改动,即可适应不同直流电压输入、不同输出功率的场合。对于开发使用太阳能、风能及其他清洁能源有着长远的意义。
[1]王宇.风光互补发电控制系统的研究与开发 [D].天津:天津大学,2004.
[2]彭国平,李帅,鱼振民,易萍虎.小型风电系统的最大功率跟踪的研究 [[J]:西安交通大学学报.2004,38(4):357~360.
[3]贾要勤,曹秉刚,杨仲庆.风力发电的MPPT快速响应控制方法[[J]:太阳能学报.2004,25(2):171~175.
[4]雷元超,陈春根,沈骏,等.光伏电源最大功率点跟踪控制方法研究 [J]:电工电能新技术,2004,23(3):76~80.
[5]周志敏,周纪海,纪爱华.充电器电路设计与应用[M].北京:人民邮电出版社.2005.
猜你喜欢
电力勘测设计(2022年3期)2022-04-07
防爆电机(2022年1期)2022-02-16
汽车观察(2021年11期)2021-04-24
中国新通信(2020年1期)2020-05-25
海峡姐妹(2019年12期)2020-01-14
汽车观察(2018年12期)2018-12-26
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
电脑知识与技术(2016年24期)2016-11-14
快乐作文·低年级(2016年9期)2016-09-30