基于动力学仿真的无人机伞降回收系统设计
2012-07-25 07:58:26丁娣钱炜祺和争春何开锋
飞行力学 2012年6期
丁娣,钱炜祺,和争春,何开锋
(中国空气动力研究与发展中心计算空气动力学研究所,四川绵阳 621000)
引言
无人机回收有自行着陆回收、撞网回收、伞降回收、垂直起降回收和智能自动回收等常用方式[1]。其中,伞降回收方式整个过程可自动完成、安全性好,对场地和操作人员要求较低,得到了广泛的应用。
国外对小型无人机战场环境[2]及舰船直升机起降甲板[3]上的翼伞精确回收等多种应用都进行了试验和理论研究,仿真模型和试验数据也充分说明了伞降回收技术的可行性。另一方面,对于回收过程中的特殊动力学现象(转换吊挂、伞绳吊带材料及特殊设计[4]、风场扰动影响及控制策略与控制结构[5]等),国内外也开展了相关研究。此外,国内对无人机伞降回收的动力学过程,建立了平面质点模型进行研究[6],分析了机伞系统的运动轨迹和姿态。而对于无人机伞降回收系统设计方面,回收系统工程设计方法[7]可以根据许可着陆速度和回收载荷,依靠经验公式给出降落伞相关参数。
本文针对无人机伞降回收系统设计,利用面向对象的开放式“降落伞回收系统仿真平台”(Aerocraft Recovery and Landing Simulation Software System,ARLSSS)实现了无人机伞降回收系统的十二自由度仿真,并拓展了无人机伞降回收系统设计方法。
1 无人机伞降系统设计
1.1 回收系统工程设计方法
回收系统的主要设计准则是保证悬挂的回收物或回收系统本身的部件不会承受有害的过载、变形、振动或着陆撞击[7]。常用的设计条件包括:回收系统的起动速度和高度;在规定高度下,下降速度分量的要求值或容许值,如着陆速度限制;回收物的过载限制;回收系统的容许重量及存放空间限制;适用吊具在回收物上的连接点位置和强度等。回收系统的设计准则、设计条件和设计方法可直接地应用于无人机伞降系统设计。
依据回收系统工程设计方法,给定回收最大许可着陆速度ve和回收载荷质量,由平衡动压qe估算降落伞的总阻力面积SCD,即:
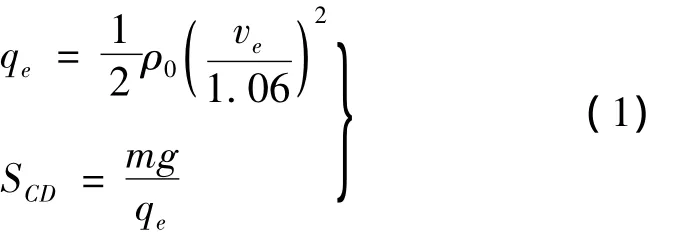
式中,ρ0为着陆高度处的大气密度;SCD为伞的总阻力面积;m为回收物质量。对于多伞系统,设nc为降落伞的数目,则单具降落伞的伞衣面积为:

式中,CDC为群伞的阻力系数,由试验可知比单个降落伞的阻力系数CD0要小,若nc=1,则有CDC=CD0。给定伞型后,由伞衣面积经验公式可进一步得到伞衣名义直径D0和伞绳长度l0、伞衣幅高hs等参数。
1.2 降落伞回收系统仿真平台
降落伞回收系统仿真平台[8-9]软件平台采用分层建模思想,由面向对象的程序设计方法实现,是一个开放性的回收系统仿真软件框架。曾用于某型飞船回收着陆过程动力学仿真,其可信性通过飞行试验数据和空投录像等多种途径验证[10],可用于多级降落伞系统回收全过程仿真,具有伞舱盖碰撞分析、偏差仿真分析和仿真结果三维可视化等功能。利用软件平台提供的相关工具,还可方便地对回收物参数、降落伞系统参数、物伞气动力数据、回收起始点参数、着陆场高度、风场数据、回收模式及工作过程时序等进行设置。通过仿真,不仅能够得到物伞的位置、速度等质心运动信息,而且还能获得物伞的姿态运动以及二者之间的相对运动等信息。
对于具体的回收系统,可通过图1所示的流程来构建系统的动力学模型,进而实现回收系统动力学仿真。可根据实际分析的需要,选择将回收物和全充满后的降落伞当作六自由度刚体或三自由度质点,并设定伞绳、吊带和连接带等的弹性和阻尼,考虑拉直过程中伞衣伞绳与伞包之间的相对运动以及充气过程中伞衣阻力面积等参数的变化,在参数分析的基础上即可进行降落伞回收系统设计。
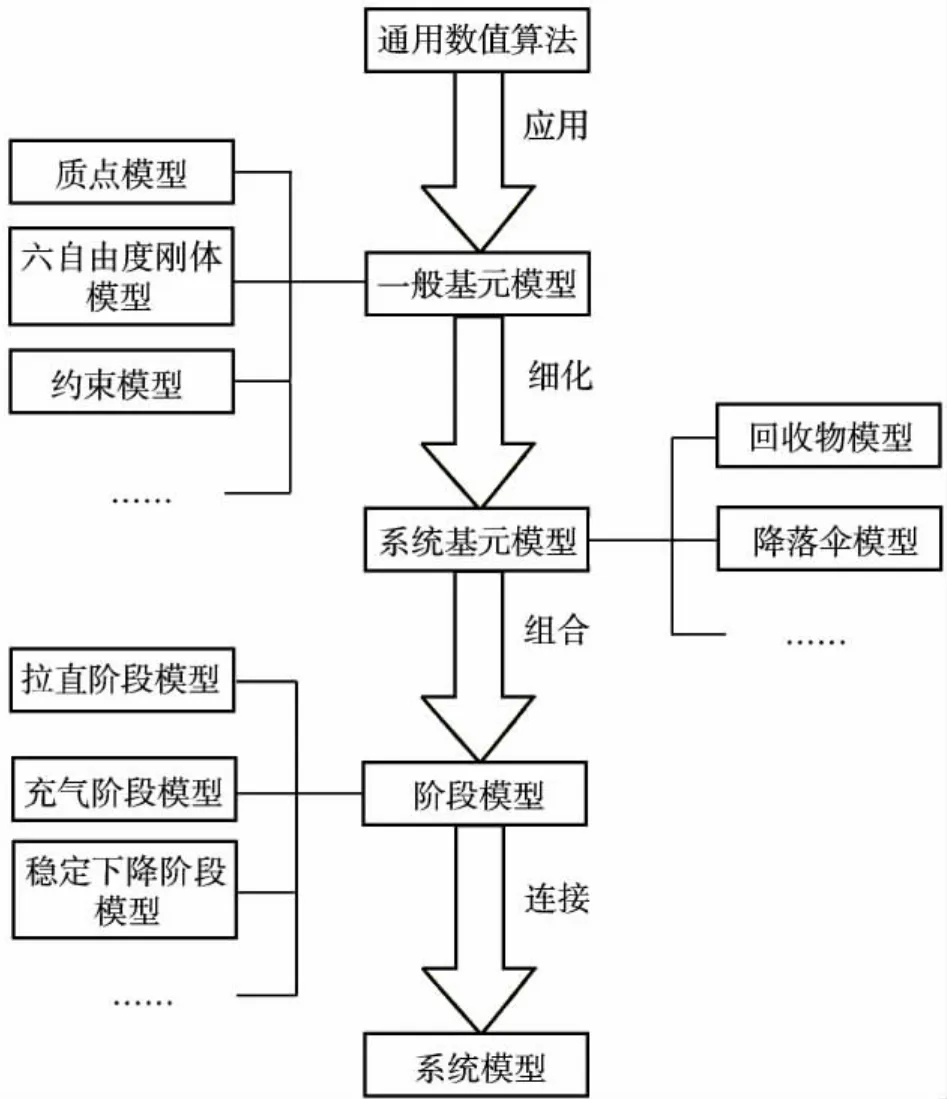
图1 回收系统模型构建过程
1.3 伞降回收系统十二自由度仿真分析
考虑建立机伞系统十二自由度动力学模型,将无人机和全充满伞考虑为六自由度刚体,二者之间由可拉不可压的弹性绳连接,并采用如下假设:
(1)降落伞在充气和张满过程中保持轴对称形状,伞衣完全充满后具有固定形状,不考虑过度充气和呼吸现象;
(2)只考虑伞衣产生的气动力,认为伞衣的气动压心和几何中心重合;
(3)因降落伞运动的非定常性引起的气动力和力矩的增量部分用附加质量表示;
(4)考虑伞绳和吊带的弹性,且可拉不可压;
(5)采用平面大地假设。
分别考虑拉直、充气、稳定下降等阶段,建立无人机降落伞回收系统动力学模型,并将某型无人机的相关参数及由工程经验设计给出的降落伞参数代入上述动力学模型中进行计算。设回收开始时刻无人机的飞行高度为1 000 m,速度为102 m/s,针对质量为300 kg的无人机,图2中给出了仿真得到的合速度和伞绳张力随时间的变化曲线。
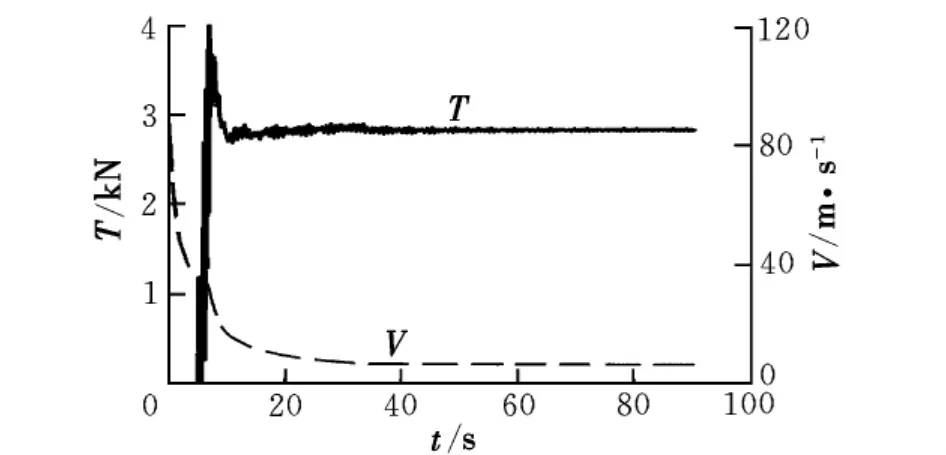
图2 无人机合速度和伞绳张力随时间的变化
图2中,初始速度102 m/s,并在开伞之后迅速降低,逐步接近许可着陆速度;张力峰值(4 kN)出现在降落伞开伞充气过程中,且明显大于稳定后张力(2.8 kN),其后由于机伞相对姿态运动引起伞绳中的张力有一个较长时间的波动。由于张力峰值的存在,在无人机伞降回收系统设计中,除着陆速度外,还需要考虑张力峰值。
在设计无人机伞降系统中,无人机质量m是一个重要的系统参数,也是无人机伞降系统中降落伞规模的主要设计依据。图3针对给定降落伞系统,给出了回收物质量变化对着陆速度(Vend)和开伞力峰值(Tp)的影响。

图3 回收物质量对着陆速度及开伞力峰值的影响
由图3可知,着陆速度与无人机质量基本呈线性递增关系,而“开伞力峰值-无人机质量曲线”的斜率随无人机质量增大而增大,即无人机质量对开伞力峰值的影响随无人机质量增加而增大。
2 无人机伞降回收系统参数分析
2.1 降落伞阻力面积分析
针对质量为300 kg的无人机,通过仿真可以分析降落伞总阻力面积对着陆速度和开伞力峰值的影响,图4给出了总阻力面积变化对着陆速度和开伞力峰值的影响。
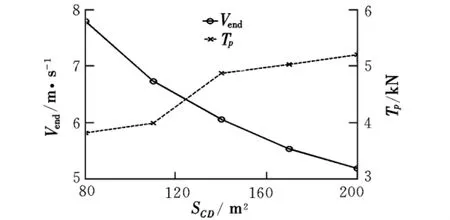
图4 总阻力面积对着陆速度及开伞力峰值的影响
由图4可知,在总阻力面积的影响下,着陆速度和开伞力峰值的变化趋势相互冲突:阻力面积越小,着陆速度越大,开伞力峰值越小;阻力面积越大,着陆速度越小,开伞力峰值越大。
对已知回收物进行回收,在给定着陆速度和开伞力峰值限制下,根据与图4类似的仿真分析,可确定降落伞系统总阻力面积。如对于质量300 kg的无人机,若着陆速度和开伞力峰值限制在7 m/s和5 kN以下,那么降落伞总阻力面积可选取在[103,163]m2范围内;若着陆速度和开伞力峰值限制在6.416 m/s和4.416 kN以下,则无法设计出满足要求的降落伞总阻力面积。在后一种情况下,可以通过一些工程手段,如收口技术等来降低开伞力峰值以满足着陆速度的要求。
2.2 无人机伞降系统收口设计
采用伞衣收口方法可实现对阻力面积的控制,底边收口是应用最为广泛的收口技术,即在伞衣底边或进气口周围的收口环中采用一定长度的收口绳控制伞衣阻力面积,使伞衣充气分两次完成,从而达到减小开伞冲击的目的。本节主要讨论收口状态阻力面积与总阻力面积的比值kS=S1/SCD对着陆速度和开伞力峰值的影响。
若需要采用收口技术来降低开伞力峰值,则还需要对收口阻力面积比和解除收口时间等参数进行设计,图5中给出了收口阻力面积比对着陆速度和开伞力峰值的影响。由于采用了收口技术,在降落伞充气阶段将出现两个开伞力峰值,分别用Tp1和Tp2表示,图中针对300 kg的无人机和总阻力面积为140 m2的降落伞回收系统,分析了不同收口阻力面积比对着陆速度和两个开伞力峰值的影响。
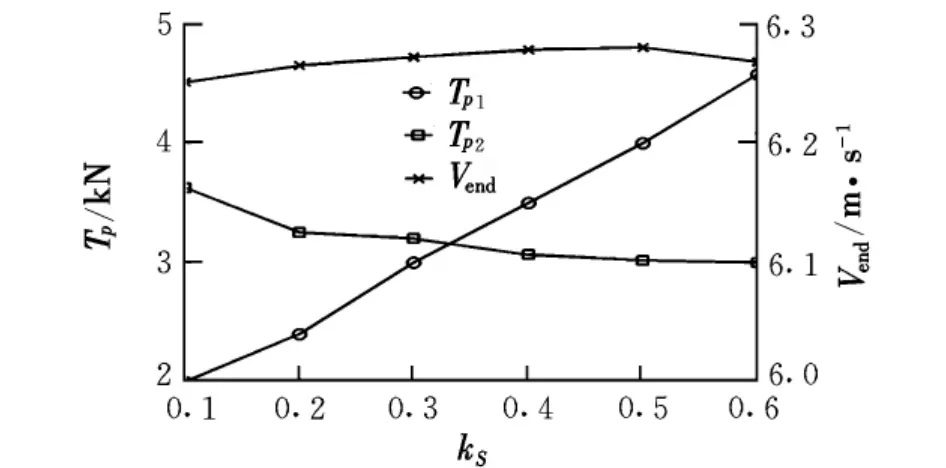
图5 收口阻力面积比对着陆速度和开伞力峰值的影响
由图5可知,收口阻力面积增加,对着陆速度影响不大,第一次开伞力峰值随之增加,而第二次开伞力峰值随之减小。因此采用收口技术可以明显降低充气阶段的开伞力峰值,调整收口阻力面积又对着陆速度影响不大,因此能够有效提高回收系统的安全可靠性。当设计降落伞收口阻力面积时,需要选择合适的比值保证两次张力峰值均在开伞冲击容许的范围内。
3 结束语
本文以无人机伞降回收为应用背景,构建了机伞系统十二自由度动力学仿真模型。在此基础上对无人机回收全过程进行仿真,根据无人机伞降系统设计方法,分析了回收物质量、总阻力面积和收口状态阻力面积比等对着陆速度和开伞力峰值的影响。文中构建的十二自由度物-伞系统动力学仿真模型通用性较强,利用仿真程序,可进行无人机降落伞系统设计及参数优化。与回收系统工程设计方法相比较,基于动力学仿真的设计方法至少有以下两个优点:可以将设计指标从最大许可着陆速度扩展到考虑其他重要系统指标,如开伞力峰值、开伞动压等;可以细化设计方案以及其他设计参数(如收口伞设计及收口状态阻力面积比),有助于开展精细化设计。因为面向对象的ARLSSS系统是一个开放性的平台,下一步可将十二自由度动力学仿真扩展到更多自由度,进一步研究无人机、降落伞各自的姿态运动及刚体运动与柔性伞绳运动的耦合等更为复杂的动力学现象。
[1]陈学义,何庆,姜勇,等.无人机回收技术及其发展[J].飞航导弹,2011,(4):79-82.
[2]Wyllie T,Downs P.Precision parafoil recovery-providing flexibility for battlefield UAV systems[R].AIAA-97-1497,1997.
[3]Brown G,Haggard R,Fogleman J.Parafoils for shipboard recovery of UAVs[R].AIAA-91-0835-CP,1991.
[4]Denny R,Roland S J,Dunker S.Basic design of a repositioning event[R].AIAA-2009-2911,2009.
[5]席庆彪,张波,田小雄,等.基于风场估测的无人机伞降定点回收研究[J].西北工业大学学报,2004,22(4):452-455.
[6]李光超,马晓平.无人机伞降回收运动分析[J].飞行力学,2007,25(4):25-28.
[7]Ewing E G,Knacke T W.回收系统设计指南[M].北京:航空工业出版社,1988.
[8]宋旭民,秦子增,程文科,等.航天器回收着陆仿真软件系统(ARLSSS)简介[J].航天返回与遥感,2004,25(3):7-10.
[9]宋旭民,彭勇,程文科,等.降落伞系统动力学的面向对象仿真框架[J].航空计算技术,2004,34(3):70-72.
[10]丁娣.载人飞船大型降落伞回收系统中几个动力学问题研究[D].长沙:国防科学技术大学,2011.
猜你喜欢
天津师范大学学报(自然科学版)(2022年4期)2022-10-15 08:00:56
小学生学习指导(中年级)(2021年12期)2021-12-30 07:57:22
塑料包装(2020年5期)2020-11-21 06:45:24
航天返回与遥感(2020年3期)2020-07-09 12:26:14
小溪流(画刊)(2017年11期)2018-01-09 19:15:50
北京航空航天大学学报(2017年10期)2017-04-20 08:51:22
创新作文(1-2年级)(2016年12期)2016-12-26 12:48:40
汽车零部件(2015年5期)2015-01-03 08:00:48
高中生·青春励志(2014年11期)2014-11-25 10:07:24
科技传播(2014年15期)2014-08-30 17:00:55